地质灾害的损毁区域勘测方法及其系统
文献发布时间:2023-06-19 09:27:35
技术领域
本申请涉及地质灾害勘测的领域,尤其是涉及一种地质灾害的损毁区域勘测方法及其系统。
背景技术
目前在地质灾害详细调查中发现大多数存在地质灾害(隐患)的边坡所在区域,由于边坡开挖不规范,存在高陡边坡,且随着崩塌/滑坡地质灾害(隐患)的发生,微地貌发生改变,出现道路灭失、调查区存在安全隐患等情况出现,在调查进行时,通过人为方式从下向上观察存在较大的视觉误差。
针对上述中的相关技术,发明人认为存在有通过人为方式从下向上观察存在崩塌/滑坡地质灾害(隐患)的区域的具体情况存在较大的视觉误差,而且人眼存在视觉盲区、视觉单一、视觉狭小、观察角度破碎化等问题,以使得所获取到关于地质灾害的数据与实际数据之间存在较大的误差,不利于人们掌握存在地质灾害(隐患)的区域的情况,进而使得人们无法对地质灾害,如山体滑坡等情况作出预测的缺陷。
发明内容
为了方便工作人员对存在地质灾害(隐患)的区域进行调查,本申请提供一种地质灾害的损毁区域勘测方法及其系统。
第一方面,本申请提供一种地质灾害的损毁区域勘测方法,采用如下的技术方案:
地质灾害的损毁区域勘测方法,包括:
获取目标损毁区域的卫星图像信息;
基于所述卫星图像信息,确定所述目标损毁区域中需通过无人机进行补采图像的位置信息,并将该位置信息发送至关联无人机,以对该位置信息所对应的区域进行图像补采;
接收所述关联无人机发送的补采图像信息;
基于所述卫星图像信息及补采图像信息,进行三维建模处理,形成所述目标损毁区域的三维模型;
根据所述三维模型,确定所述崩塌/滑坡目标损毁区域的面积、体积以及目标治理区域范围。
通过采用上述技术方案,从卫星拍摄的历史照片中获取关于损毁区域的卫星图像信息,因为卫星所获取的图像部分因时间比较久远,损毁区域部分位置会发生相应变化,因此当前的损毁区域的具体情况会历史情况之间存在一定的差异,因此需要通过无人机基于所获取的卫星图像信息,对卫星图像信息中不清楚的地方进行补充采集,以使得卫星图像信息中不清楚的地方清晰化,进而使得损毁区域的情况更加清晰化,以便用户更加直观的了解损毁区域的具体情况。令无人机根据所获取的位置信息的指引飞到具体的位置处,通过利用无人机拍摄的方式来获取补采图像,无人机可以采集到依靠人力无法采集到的区域图像,以对卫星图像信息中不清楚的点进行补充,以使得卫星图片更加完整。同时,采用无人机进行信息采集,相对于人工的方式来说,其效率更加高。
在根据无人机获取了补采图像之后,通过对卫星图像信息和补采图像信息进行三维建模处理后得到关于损毁区域的三维模型,三维建模图像可以直观地观看到损毁区域各个地方的情况,工作人员可以通过所建立的三维模型,计算出损毁区域崩塌/滑坡的面积、体积以及损毁区域被损毁后治理区域范围,进而使得整个损毁区域的现状更加清晰明确,方便相关工作人员对损毁区域作出及时判断和处理。
优选的,所述基于所述卫星图像信息,确定所述目标损毁区域中需通过无人机进行补采图像的位置信息步骤,包括:
根据所述卫星图像信息的模糊区域确定所述补采图像的位置信息。
通过采用上述技术方案,卫星图像信息中的模糊区域即为信息丢失区域,通过对卫星图像信息中的模糊区域进行图像补充采集,以补全卫星图像信息中缺失的地方,进而使得根据卫星图像信息和补采图像信息生成的三维模型更加贴合当前损毁区域的情况,以使得通过三维建模方式更加方便了解地质灾害的损毁区域情况。
优选的,所述基于所述卫星图像信息及补采图像信息,进行三维建模处理,形成所述目标损毁区域的三维模型步骤,包括:
获取卫星图像信息的原始灰度化图像信息;
基于原始灰度化图像信息获取目标损毁区域的原始二值化图像信息;
根据原始二值化图像信息获取目标损毁区域的轮廓数据信息。
通过采用上述技术方案,通过对所获取的卫星图像和补采图像进行灰度化处理和二值化处理,以分别获得关于卫星图像和补采图像中关于损毁区域的轮廓,以获得建立三维模型所需要的基础信息,通过所生成的轮廓数据信息和轮廓补齐数据信息便可以建立关于损毁区域的三维模型。
优选的,所述基于所述卫星图像信息,确定所述目标损毁区域中需通过无人机进行补采图像的位置信息步骤,还包括:
根据所述卫星图像信息确定所述损毁区域的边坡走向信息;
根据所述边坡走向信息确定所述补采图像的位置信息。
通过采用上述技术方案,通过卫星图像信息先确定损毁区域的边坡走向,无人机根据边坡的走向进行飞行拍摄以获取补采图像信息,无人机可以到达行人无法达到的区域,以使得所采集到的信息更加齐全,以便所建立的损毁区域的三维模型更加完整。
优选的,所接收所述关联无人机发送的补采图像信息步骤,包括:
接收所述关联无人机通过倾斜摄影拍摄方式获取的采补图像信息。
通过采用上述技术方案,倾斜摄影通过从一个垂直、四个倾斜、五个不同的视角同步采集影像,获取到丰富的建筑物顶面及侧视的高分辨率纹理。它不仅能够真实地反映地物情况,高精度地获取物方纹理信息,还可通过先进的定位、融合、建模等技术,生成真实的三维模型。
优选的,所述基于原始灰度化图像信息获取目标损毁区域的原始二值化图像信息步骤,包括:
基于所述二值化图像信息获取轮廓点位数据信息;
根据相邻所述轮廓点位数据信息的差值与预设差值的大小;
若所述差值大于所述预设差值,则确定该轮廓点位数据信息为轮廓连续点并根据所述连续点生成轮廓数据信息;
若否,则去除该轮廓点位数据信息。
通过采用上述技术方案,通过保留连续点的方式,以获得由连续点组成的轮廓,通过舍弃孤立点,筛选外围轮廓点的方式来优化点位数据,以使得最终获得与现场实际情况吻合度较高的的轮廓图像。
优选的,所述根据所述三维模型,确定所述目标损毁区域的崩塌/滑坡体面积、体积以及目标治理区域范围及面积步骤,还包括:
根据所述原始灰度化图像信息获取灰度化图像信息中相邻像素点之间的像素点差值并将所述像素点差值与预设像素点差值进行大小比较;
若所述像素点差值大于所述预设像素点差值,则记录该像素点以形成特征像素点集信息;
根据所述特征点集信息确认目标损毁区域的范围与投影面积。
通过采用上述技术方案,通过比较相邻像素点之前的差值,以判断所比较的像素点是否属于特征像素点通道的像素点,以此得出特征像素点集合,通过计算特征像素点结合的面积,即为目标损毁区域的面积。
第二方面,本申请提供一种地质灾害的损毁区域勘测系统,采用如下的技术方案:
所述系统包括:
目标图像获取模块,获取目标损毁区域的卫星图像信息;
补采位置获取模块,基于所述卫星图像信息,确定所述目标损毁区域中需通过无人机进行补采图像的位置信息,并将该位置信息发送至关联无人机,以对该位置信息所对应的区域进行图像补采;
补采图像接收模块,接收所述关联无人机发送的补采图像信息;
三维建模模块,基于所述卫星图像信息及补采图像信息,进行三维建模处理,形成所述目标损毁区域的三维模型;
面积计算模块,根据所述三维模型,确定所述目标损毁区域的崩塌/滑坡体面积、体积以及目标区域治理范围与面积。
通过采用上述技术方案,目标图像获取模块从卫星拍摄的历史照片中获取关于损毁区域的卫星图像信息,因为卫星所获取的图像部分因时间比较久远,损毁区域部分位置会发生相应变化,因此当前的损毁区域的具体情况会历史情况之间存在一定的差异,因此需要通过无人机基于所获取的卫星图像信息,对卫星图像信息中不清楚的地方进行补充采集,以使得卫星图像信息中不清楚的地方清晰化,进而使得损毁区域的情况更加清晰化,以便用户更加直观的了解损毁区域的具体情况。令无人机根据所获取的位置信息的指引飞到具体的位置处,通过利用无人机拍摄的方式来获取补采图像,无人机可以采集到依靠人力无法采集到的区域图像,以对卫星图像信息中不清楚的点进行补充,以使得卫星图片更加完整。同时,采用无人机进行信息采集,相对于人工的方式来说,其效率更加高。补采图像接收模块用于接收无人机发送的图片。通过建立三维模型后,可以获取崩塌/滑坡体的体积,以使得工作人员更加清楚的掌握地质灾害区域的详细情况。
在根据无人机获取了补采图像之后,三维建模模块通过对卫星图像信息和补采图像信息进行三维建模处理后得到关于目标损毁区域的三维模型,三维建模图像可以直观地观看到损毁区域各个地方的情况,工作人员可以通过所建立的三维模型,面积、体积计算模块计算出崩塌/滑坡体的面积、体积以及损毁区域的治理范围与面积,进而使得整个损毁区域的现状更加清晰明确,方便相关工作人员对损毁区域作出及时判断和处理。
第三方面,本申请提供一种计算机设备,采用如下的技术方案:包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于:所述处理器执行所述计算机程序时实现上述方案中任一项所述地质灾害的损毁区域勘测方法的步骤。
第四方面,本申请提供一种计算机可读存储介质,存储有能够被处理器加载并执行如权利要求上述方案中任一种所述方法的计算机程序。
综上所述,本申请包括以下至少一种有益技术效果:
1.从卫星拍摄的历史照片中获取关于损毁区域的卫星图像信息,因为卫星所获取的图像部分因时间比较久远,损毁区域部分位置会发生相应变化,因此当前的损毁区域的具体情况会历史情况之间存在一定的差异,因此需要通过无人机基于所获取的卫星图像信息,对卫星图像信息中不清楚的地方进行补充采集,以使得卫星图像信息中不清楚的地方清晰化,进而使得损毁区域的情况更加清晰化,以便用户更加直观的了解损毁区域的具体情况;
2.通过卫星图像信息先确定损毁区域的边坡走向,无人机根据边坡的走向进行飞行拍摄以获取补采图像信息,无人机可以到达行人无法达到的区域,以使得所采集到的信息更加齐全,以便所建立的损毁区域的三维模型更加完整;
3.通过比较相邻像素点之前的差值,以判断所比较的像素点是否属于特征像素点通道的像素点,以此得出特征像素点集合,通过计算特征像素点结合的面积,即为目标区域治理的面积。
附图说明
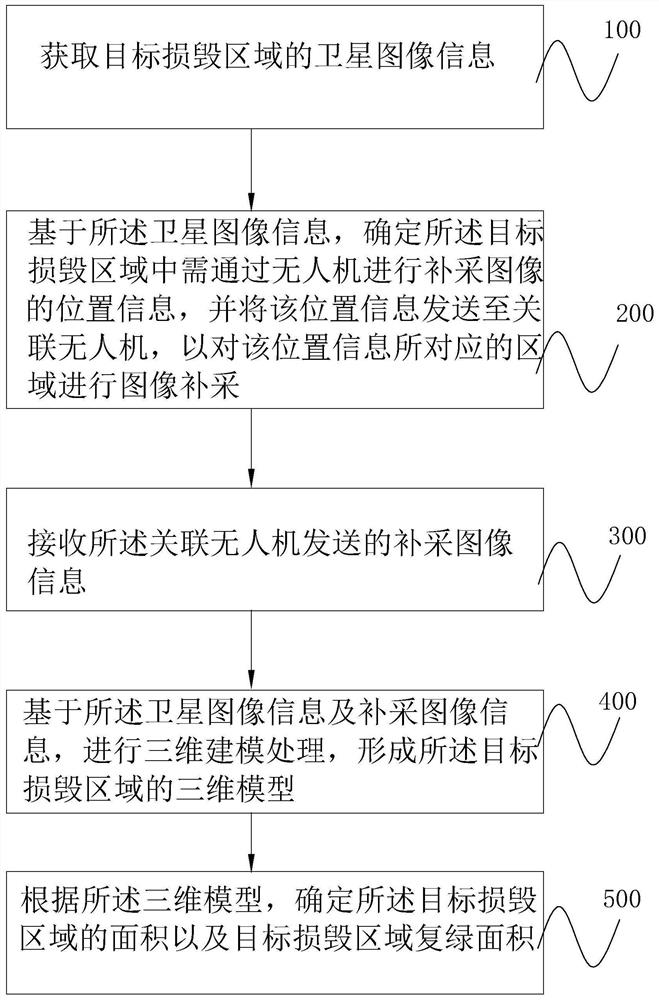
图1是本申请一实施例中地质灾害的损毁区域勘测方法的一流程图;
图2是本申请一实施例中地质灾害的损毁区域勘测系统的一原理图;
图3是本申请一实施例中无人机正射影像的飞行路线示意图;
图4是本申请一实施例中计算机设备的一示意图。
具体实施方式
以下结合附图1-4对本申请作进一步详细说明。
本申请实施例公开一种地质灾害的损毁区域勘测方法。参照图1,地质灾害的损毁区域勘测方法包括以下步骤:
S100:获取目标损毁区域的卫星图像信息。
在本实施例中,卫星图像信息是指从卫星图片存储系统中调取的关于目标调查区域的图像集合。目标损毁区域是指目标地质灾害(隐患)所在边坡中滑坡/崩塌周界、地形地貌破坏周界围成的区域,在其他实施方式中,目标损毁区域还可以是其他进行地质灾害调查的区域。
具体地,通过文件调取的方式,调取存储在卫星云片系统内关于目标损毁区域的卫星图像信息,并将该卫星图像进行存储。
进一步地,在一实施例中,还包括步骤S200:基于卫星图像信息,确定目标损毁区域中需通过无人机进行补采图像的位置信息,并将该位置信息发送至关联无人机,以对该位置信息所对应的区域进行图像补采;接收关联无人机发送的补采图像信息。
在本实施例中,补采图像是指所获取到的卫星图像信息中不完整或者不清楚的区域,通过无人机补拍的方式,补全图像信息缺漏的部分;位置信息是指无人机需要进行拍摄的地理坐标。
在本实施例中,通过圈定卫星图像中的模糊区域(在其他实施方式中,还可以通过人工控制无人机的方式,令无人机飞至矿坑的上方,无人机RTK系统圈定位置,并对卫星图像中描述不清的位置进行补充调查),将卫星图像中的模糊区域定位补采区域,从卫星图像中获取补采区域的位置信息并将位置信息发送无人机,无人机根据位置飞行该地理位置处拍摄该补采区域的图像,以补充卫星图像中模糊的区域。
进一步地,在一实施例中,关联无人机通过倾斜摄影拍摄方式获取补采图像信息。
具体地,首先,无人机飞行至从卫星图像中获取到的模糊区域处,通过无人机上垂直设置的摄像头获取该区域的正射影像,在本实施例中以以下方法举例说明正射影像的获取方式,以补采区域边界点为起始点,无人机先向西飞行至补采区域的边界,然后向南飞行预设距离后,再沿着向东的路径飞行至预设距离后,再向南飞行预设距离后,再向西飞行至补采区域的边界,以此飞行方式反复飞行直至补采区域的边界以获得关于补采区域的正射影像,东、西方向的飞行距离大于向南飞行的路径。
在获取了补采区域的正射影像之后,使无人机沿着东-西走向、南-北走向分别来回飞行以获取倾斜摄影影像,具体做法为,先令无人机位于补采区域外,然后使无人机沿着东-西方向飞行一次,然后再令无人机沿着西-东方向飞行一次,再然后令无人机沿着该损毁区域的南-北方向从损毁区域的一侧飞行至损毁区域的另一侧,最后再沿着北-南的方向飞行,以获得该处补采区域的倾斜摄影影像,根据正射影像和倾斜摄影影像生成该区域的补采图像。
进一步地,在一实施例中,在执行了步骤S200后,还包括步骤S201:
根据卫星图像信息确定损毁区域的边坡走向信息;根据边坡走向信息确定补采图像的位置信息。
在本实施例中,边坡走向信息是指边坡在空间延伸的方向。
具体地,所获取的卫星图像信息中有地质灾害(隐患)区域的整体样貌,通过卫星图像信息便可以圈定卫星图像中关于地质灾害(隐患)区域中损毁的周界,然后基于地质灾害(隐患)区域的损毁周界及边坡走向信息布设不少于三个半圆形图像采集点,并将该采集点的坐标信息发送至无人机,在本实施例中以三个示例说明。然后令无人机分别飞至该采集点通过RTK系统圈定位置以进行图像信息补采以获得补采图像。
进一步地,在一实施例中,还包括步骤S300:
S300:基于卫星图像信息及补采图像信息,进行三维建模处理,形成目标损毁区域的三维模型;
在本实施例中,三维建模处理是指对所获取的卫星图像和补采图像进行预处理,以获取损毁区域各点的三维坐标。
具体地,根据所获取到的卫星图像先建立三维模型的空间坐标系,然后获取卫星图像和补采图像中各像素点的三维坐标,通过卫星图像和补采图像建立损毁区域的三维模型。
进一步地,在一实施例中,还包括步骤S400: 接收所述关联无人机发送的补采图像信息。
具体地,与无人机之间建立数据传输关系,实时接收无人机传输的图像或者是影像信息,并将接收到的信息进行存储。
进一步地,在一实施例中,还包括以下步骤301 :获取卫星图像信息的原始灰度化图像信息;
基于原始灰度化图像信息获取目标损毁区域的原始二值化图像信息;
根据原始二值化图像信息获取目标损毁区域的轮廓数据信息;
在本实施例中,原始灰度化图像信息是指对所获取的卫星图像进行灰度化处理有得到的图像;原始二值化图像信息是指对灰度化图像进行二值化处理后得到的损毁区域的轮廓;轮廓数据信息是指组成损毁区域轮廓的各个像素点;补充灰度化图像信息是指对所获得的补采图像进行图像灰度化处理;轮廓补齐数据信息是指将补充灰度化图像信息进行二值化处理后,得到的轮廓像素点。
具体的,在获取了目标损毁区域的卫星图像信息之后,使用Python及OpenCV对卫星图像信息批量查找检测物体的轮廓,在处理时先自动轮询卫星图像进行灰度化处理,且将特征像素点通道-200%明度,非特征像素点通道明度增强300%;然后再将所获得的灰度化图像进行图像二值化,再使用RETR_EXTERNAL或RETR_TREE模式检索轮廓,以确认卫星图像中的模糊区域(在其他实施方式中,还可以使用OpenCV对卫星图像信息进行处理,通过Brenner梯度函数或者是拉普拉斯算子边缘检测的方式或者是Tenengrad梯度函数的方式来获取卫星图像中模糊的区域),然后再获取模糊区域(或轮廓数据丢失点)的对应边坡的地理位置坐标,然后再将获取到的地理坐标信息发送至关联无人机处,无人机根据所获取的地理坐标信息飞行到对应的位置处进行拍摄,以获取关于目标损毁区域的补采图像。
进一步地,在一实施例中,还包括步骤302:采用CHAIN_APPROX_SIMPLE方法筛选轮廓数据并输出卫星图像中目标损毁区域的轮廓点位数据信息,根据相邻轮廓点位数据信息的差值与预设差值的大小;若差值大于预设差值,则确定该轮廓点位数据信息为轮廓连续点并根据连续点生成轮廓数据信息;若否,则去除该轮廓点位数据信息。
在本实施例中,轮廓点位数据信息是指组成目标损毁区域的各像素点的集合;预设差值是指用来判断相邻点之间是否位于坐标系中相邻位置的像素预设差值;轮廓数据信息是指组成损毁区域的轮廓线各轮廓点的坐标集合。
具体地,在获取了损毁区域的二值化图像后,通过使用CHAIN_APPROX_SIMPL方法筛选所获得的二值化图像中的孤立点,删除筛选出来的孤立点并去除孤立点,保留轮廓中连续的轮廓点以获取连续的图像轮廓。同时,对补采图像使用与卫星图像相同的处理方式,以获取关于补采图像的轮廓数据。
在获取了损毁区域的轮廓点位数据信息之后,以轮廓点位数据的起始点为基准点建立三维模型的空间坐标系,然后分别将所获取的卫星图像轮廓数据和补采图像轮廓数据中各个像素点的坐标对应空间坐标系中各个坐标点,以此建立损毁区域的三维模型。例如,在获取了损毁区域的卫星图像和补采图像之后,对卫星图像和补采图像进行灰度图像化和图像二值化处理之后,将处理后的图像输入至PhotoMesh、ContexCapture等三维建模软件中,利用软件生成损毁区域的三维模型。在其他实施方式中,还可以通过FreeCAD、Blender等三维建模软件实现对损毁区域的建模。
进一步地,在一实施例中,还包括步骤S400:根据三维模型,确定目标损毁区域崩塌/滑坡体的面积、体积以及目标治理区域范围与面积;
根据原始灰度化图像信息获取灰度化图像信息中相邻像素点之间的像素点差值并将像素点差值与预设像素点差值进行大小比较;
若像素点差值大于预设像素点差值,则记录该像素点以形成特征像素点集信息;
根据特征像素点集信息确认目标治理区域面积。
在本实施例中,目标治理区域的面积是指在损毁区域范围内治理的区域;预设像素点差值是指RGB三色通道中的特征像素点通道区间的范围值。特征像素点集是指所有落入特征像素点通道区间范围的像素点。
具体地,通过对卫星图像和补采图像进行处理之后,通过计算损毁区域轮廓的各像素点是否落入特征像素点通道的区间范围内,如果落入特征像素点通道区间范围内,则对该像素点进行保留以形成像素点集合,最后对所获取到的像素点形成的轮廓范围进行面积计算,以获得治理区域的面积。目标损毁区域的面积则通过损毁区域轮廓计算区域面积即可。在三维模型表面捕获滑坡体坐标高程值和各像素点的坐标后,通过高程值和像素点的坐标计算目标损毁区域的崩塌体积。
本申请实施例还公开一种地质灾害的损毁区域勘测系统。参照图2,地质灾害的损毁区域勘测系统包括:
目标图像获取模块,获取目标损毁区域的卫星图像信息;
补采位置获取模块,基于所述卫星图像信息,确定所述目标损毁区域中需通过无人机进行补采图像的位置信息,并将该位置信息发送至关联无人机,以对该位置信息所对应的区域进行图像补采;
补采图像接收模块,接收所述关联无人机发送的补采图像信息;
三维建模模块,基于所述卫星图像信息及补采图像信息,进行三维建模处理,形成所述目标损毁区域的三维模型;
面积计算模块,根据所述三维模型,确定所述目标损毁区域的面积以及目标治理区域面积。
补采位置获取模块包括模糊区域确认子模块:根据所述卫星图像信息的模糊区域确定所述补采图像的位置信息。
补采位置获取模块包括边坡走向获取子模块:根据所述卫星图像信息确定所述损毁区域的边坡走向信息;根据所述边坡走向信息确定所述补采图像的位置信息。
三维建模模块包括图像处理子模块:获取卫星图像信息的原始灰度化图像信息;基于原始灰度化图像信息获取目标损毁区域的原始二值化图像信息;根据原始二值化图像信息获取目标损毁区域的轮廓数据信息。
补采图像接收模块包括无人机图像接收子模块:接收所述关联无人机通过倾斜摄影拍摄方式获取的采补图像信息。
图像处理子模块包括轮廓点获取单元:基于所述二值化图像信息获取轮廓点位数据信息;根据相邻所述轮廓点位数据信息的差值与预设差值的大小;若所述差值大于所述预设差值,则确定该轮廓点位数据信息为轮廓连续点并根据所述连续点生成轮廓数据信息;若否,则去除该轮廓点位数据信息。
面积计算模块包括面积计算子模块:根据所述原始灰度化图像信息获取灰度化图像信息中相邻像素点之间的像素点差值并将所述像素点差值与预设像素点差值进行大小比较;若所述像素点差值大于所述预设像素点差值,则记录该像素点以形成特征像素点集信息;根据所述特征像素点集信息确认目标损毁区域的范围及面积。
在一个实施例中,提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现以下步骤:
S100:获取目标损毁区域的卫星图像信息;
S200:基于所述卫星图像信息,确定所述目标损毁区域中需通过无人机进行补采图像的位置信息,并将该位置信息发送至关联无人机,以对该位置信息所对应的区域进行图像补采;
S300:接收所述关联无人机发送的补采图像信息;
S400:基于所述卫星图像信息及补采图像信息,进行三维建模处理,形成所述目标损毁区域的三维模型;
S500:根据所述三维模型,确定所述目标损毁区域的面积以及目标治理区域面积。
本申请实施例还公开一种计算机可读存储介质。在一个实施例中,提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现以下步骤:
S100:获取目标损毁区域的卫星图像信息;
S200:基于所述卫星图像信息,确定所述目标损毁区域中需通过无人机进行补采图像的位置信息,并将该位置信息发送至关联无人机,以对该位置信息所对应的区域进行图像补采;
S300:接收所述关联无人机发送的补采图像信息;
S400:基于所述卫星图像信息及补采图像信息,进行三维建模处理,形成所述目标损毁区域的三维模型;
S500:根据所述三维模型,确定所述目标损毁区域滑坡/崩塌体的面积、体积以及目标治理区域范围与面积。
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本申请所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(ROM)、可编程ROM(PROM)、电可编程ROM(EPROM)、电可擦除可编程ROM(EEPROM)或闪存。易失性存储器可包括随机存取存储器(RAM)或者外部高速缓冲存储器。作为说明而非局限,RAM以多种形式可得,诸如静态RAM(SRAM)、动态RAM(DRAM)、同步DRAM(SDRAM)、双数据率SDRAM(DDRSDRAM)、增强型SDRAM(ESDRAM)、同步链路(Synchlink) DRAM(SLDRAM)、存储器总线(Rambus)直接RAM(RDRAM)、直接存储器总线动态RAM(DRDRAM)、以及存储器总线动态RAM(RDRAM)等。
所属领域的技术人员可以清楚地了解到,为了描述的方便和简洁,仅以上述各功能单元、模块的划分进行举例说明,实际应用中,可以根据需要而将上述功能分配由不同的功能单元、模块完成,即将所述装置的内部结构划分成不同的功能单元或模块,以完成以上描述的全部或者部分功能。
以上所述实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围,均应包含在本发明的保护范围之内。
- 地质灾害的损毁区域勘测方法及其系统
- 一种区域地质灾害趋势预测方法及系统