一种全息透视定位系统及定位方法
文献发布时间:2023-06-19 09:29:07
技术领域:
本发明涉及全息透视定位技术领域,尤其涉及一种全息透视定位系统及定位方法。
背景技术:
随着智能科技的发展,全息透视定位技术目前在很多领域都有应用,比如用于医疗领域,通过患者的医学影像数据重建股骨患处三维模型,并将虚拟的三维模型叠加到患处,与真实的手术环境进行结合,为医生提供三维信息,全程可视化,为医生在手术中提供指导,帮助医生精确定位手术路径,提高手术的准确性和科学性;用于维修指导,尤其针对复杂设备的维修,通过混合现实技术可以协助维修人员快速找出有异常的部位,并针对维修的操作过程进行虚拟路径导航,提高维修的效率。
然而,目前全息透视定位技术定位精度有限,在实际应用过程中不能满足更高精度的定位要求。
发明内容:
本发明的目的是针对现有技术的缺陷,提供一种能够解决上述问题的全息透视定位系统及定位方法。
一种全息透视定位系统,包括规划模块、配准模块、追踪模块和定位模块,所述规划模块、配准模块和定位模块与控制模块连接。所述规划模块以目标实体为基础,重建目标实体的三维模型,并进行规划,生成数据包。所述配准模块包括光学定位模块、校准模块和混合现实模块,用于得到同一空间位置在所述混合现实模块与所述光学定位模块之间的坐标转换矩阵。所述追踪模块包括固定连接的追踪光敏模块和追踪针,用来在定位过程中追踪目标实体的位置。所述定位模块包括固定连接的定位光敏模块和若干定位探针,用于实现目标实体与三维模型在混合现实模块中的深度融合。
通过设计所述配准模块,将光学定位模块的精度引入到定位系统中,达到定位误差小至毫米级,远高于现有技术中的定位精度,可以实现不同类型应用场景的高精度定位要求。
进一步地,所述校准模块包括固定连接的特征图像模块和校准光敏模块,所述校准模块可以是能够满足特征图像模块的位置与光敏模块的位置有一个可测量的固定关系的任意形态。
进一步地,所述特征图像模块包括至少一个特征图像,特征图像可以是二维码或其他计算机可识别的包含信息的图像。
进一步地,所述校准光敏模块、定位光敏模块和追踪光敏模块均包括至少三个光敏球。
进一步地,所述至少三个光敏球处于同一平面且组成的图形面积不小于40cm
进一步地,所述光学定位模块可以为红外定位设备或电磁定位设备,其中所述红外定位设备或电磁定位设备要求精度小于2mm。
此外,本发明还提供了一种全息透视定位系统的定位方法,包括以下步骤:
(1)规划,重建目标实体的三维模型,生成数据包;
(2)事前准备,将规划模块、光学定位模块、混合现实模块与控制模块连接,并校验所述校准模块;
(3)信息加载,启动所述混合现实模块,控制系统将数据包发送给混合现实模块,使其加载数据包;
(4)配准,通过所述校准模块获得同一空间位置在所述混合现实模块与所述光学定位模块之间的坐标转换矩阵
(5)追踪,实时追踪目标实体的位置;
(6)定位,通过所述定位模块实现目标实体与三维模型在混合现实模块中的深度融合。
进一步地,所述三维模型上预设有若干模型定位点。
进一步地,校验过程为:通过调整光学定位模块和校准模块的位置和角度,使所述校准光敏模块能够被所述光学定位模块探测到。
进一步地,配准过程为:首先所述光学定位模块追踪所述校准光敏模块,计算得到所述特征图像模块中心点在所述光学定位模块中的位置数据,然后所述混合现实模块追踪所述特征图像模块,得到所述特征图像中心点在所述混合现实模块中的位置数据,基于所述特征图像模块中心点在所述光学定位模块和所述混合现实模块中的位置数据,得到同一空间位置在所述混合现实模块与所述光学定位模块之间的坐标转换矩阵
进一步地,所述特征图像模块中心点在所述光学定位模块中的位置数据的计算过程为:首先通过光学定位模块获得校准模块的位置矩阵为
进一步地,所述坐标转换矩阵的计算过程为:通过混合现实模块获取特征图像在混合现实坐标系中的位置矩阵为
进一步地,追踪过程为:把追踪模块的追踪针固定在目标实体上并调整方向,使追踪光敏模块能够被光学追踪模块识别到。
进一步的,所述定位过程中,定位模块上的定位探针按照顺序依次选择定位点,并计算得到所述定位探针在所述混合现实模块中的位置信息,然后根据加载的三维模型上的对应的模型定位点的信息,实现三维模型中模型定位点在混合现实模块中与目标实体的定位探针的针尖位置一一绑定,达到了定位模块与三维模型在混合现实模块中实时保持定位点规划时的相对姿态关系,之后通过将定位模块上的定位探针的针尖移动到场景中的对应目标实体上的各实体定位点,实现目标实体与三维模型在混合现实模块中的深度融合。
进一步地,所述定位探针在所述混合现实模块中的位置信息的计算过程为:通过所述光学定位模块追踪定位模块上的定位光敏模块的空间位置与姿态,计算得到若干定位探针在所述光学定位模块中的空间位置坐标,再通过转换矩阵
本发明一种全息透视定位系统及定位方法的有益效果是:
(1)本发明提供了一种全息透视定位系统,包括规划模块、配准模块和定位模块,通过规划模块重建目标实体的三维模型,通过配准模块得到位置信息在混合现实模块与光学定位模块之间的转换矩阵,最终实现目标实体与三维模型的精确定位。定位误差小至毫米级,实现了目标实体与三维模型在混合现实模块中的深度融合,大大提高了现有设备的定位精度,满足了术中指导、设备维修等领域的更高精度的定位要求。
(2)本发明的配准模块将光学定位模块的精度引入到混合现实模块中,通过校准模块建立光学定位模块和混合现实模块之间的联系,基于所述校准模块上特征图像模块中心点在所述光学定位模块和所述混合现实模块中的位置数据,得到对应的空间配准矩阵,获取所述光学定位模块与所述混合现实模块的坐标转换矩阵,方便了后续模型与实物之间的精确定位。
(3)通过设定校准模块的机械结构,加工时设计特征图像和光敏球的固定空间位置,并通过特征图像分别在光学定位模块和混合现实模块识别位置进行空间拟合,获取两种不同类型空间定位设备的高精度空间匹配。
附图说明:
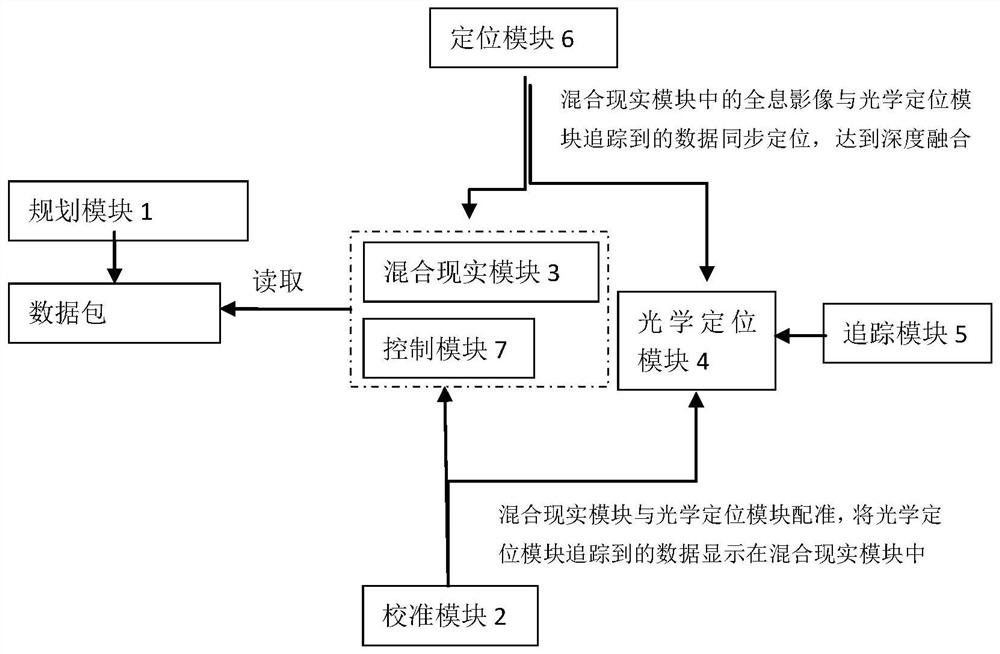
图1为本发明工作原理示意图,
图2为本发明配准模块的结构示意图,
图3为本发明校准模块的结构示意图,
图4为本发明定位模块的结构示意图,
图中:1规划模块,2校准模块,21特征图像模块,22校准光敏模块,3混合现实模块,4光学定位模块,5追踪模块,6定位模块,61定位探针,62定位光敏模块,7控制模块,8目标实体。
具体实施方式:
下面结合附图对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征能更易被本领域人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
实施例1
见图1至图4,一种全息透视定位系统,包括规划模块1、配准模块、定位模块6、追踪模块5和控制模块7,所述规划模块1、配准模块、定位模块6与控制模块7连接。
所述规划模块1以目标实体8为基础,通过重建目标实体8的三维模型,并预设三维模型的结构及定位过程中进行深度融合的若干模型定位点,生成数据包。本实施例中,用于股骨手术中的术中定位,目标实体为股骨,通过患者的医学影像数据重建股骨患处三维模型,并进行手术规划,确定截骨的角度及厚度,以及定位过程中进行深度融合的解剖标志点(即模型定位点),生成手术数据包,本申请将实现该功能的这一模块定义为规划模块,可利用现有技术来实现。
所述配准模块包括光学定位模块4、校准模块2和混合现实模块3,所述光学定位模块4为红外定位设备或电磁定位设备等,所述配准模块通过所述校准模块2获得同一空间位置在所述混合现实模块3与所述光学定位模块4之间的坐标转换矩阵
所述追踪模块5包括固定连接的追踪光敏模块和追踪针,所述追踪针定位在股骨上,所述追踪光敏模块与所述光学定位模块4配合以便在定位过程中追踪股骨的位置。所述定位模块4包括固定连接的定位光敏模块62和定位探针61,用于实现股骨与三维模型在混合现实模块3中的深度融合。
光学定位模块4用于追踪所述校准光敏模块22、定位光敏模块62和追踪光敏模块。所述校准光敏模块22、定位光敏模块62和追踪光敏模块包括4个光敏球,所述各光敏球处于同一平面且组成的图形面积不小于40cm
此外,本发明还提供了一种全息透视定位系统的定位方法,包括以下步骤:
(1)规划,首先重建股骨的三维模型,通过事先采集数据重建股骨的三维模型,并进行手术规划,确定截骨的角度及厚度,以及定位过程中进行深度融合的解剖标志点(即模型定位点),生成手术数据包。
规划模块中,首先要根据事先采集的相关数据按照实物的形状、结构来规划模型及定位中进行深度融合的模型定位点,模型定位点有三个或三个以上,其规划过程为:依次选择目标实体的易于识别及选择的三个或三个以上的特征点。
(2)事前准备,首先将规划模块1、光学定位模块4、混合现实模块3与控制模块7连接,然后校验所述校准模块2的位置(通过调整光学定位模块的位置和角度,使所述校准光敏模块能够被所述光学定位模块探测到)。
(3)信息加载,启动所述混合现实模块3,控制系统7将数据包发送给混合现实模块3,混合现实模块3加载数据包,得到三维模型与其上预设的若干模型定位点的信息。
(4)配准,将校准模块2放置到待手术的股骨处,调整光学定位模块4的位置和角度,通过所述校准模块2获得同一空间位置在所述混合现实模块3与所述光学定位模块4之间的坐标转换矩阵
因为校准模块上的校准光敏模块与特征图像模块具有刚性固定关系,光学定位模块4追踪校准光敏模块22,得到位置信息
具体的,首先通过光学定位模块追踪校准光敏模块22,获得校准模块的位置矩阵为
此外,对于配准过程中得到的坐标转换矩阵
(5)追踪,把追踪模块5的追踪针通过固定在股骨上并调整方向,确保追踪光敏模块能够被光学追踪模块识别到,以便实时追踪目标实体的位置。
(6)定位,用所述定位模块6上的定位探针61按照顺序在股骨上依次选择定位点,所述光学定位模块6通过追踪定位光敏模块62的空间位置与姿态,通过计算得到定位探针61在所述光学定位模块4中的空间位置坐标,再通过转换矩阵
定位过程中,通过光学定位模块获得定位模块上定位光敏模块的空间位置(a′
为了求解该变换矩阵
从实际应用上讲,将(a′
a)首先将(a′
b)之后分别遍历X/Y/Z三轴旋转,使得得到变换后的(a′
c)随后微调平移位置,使得综合误差进一步缩小。
d)最后得到
实施例2
本实施例中,用于股骨手术中的术中定位,目标实体为股骨,定位系统的组成和定位方法基本同实施例1,区别之处在于:所采用的校准模块中,特征图像的数目为4个,且呈一条直线排列。光敏模块中具有5个光敏球,所述各光敏球处于同一平面且组成的图形面积不小于60cm
实施例3
一种全息透视定位系统,包括规划模块1、配准模块、定位模块6、追踪模块5和控制模块7,所述规划模块1、配准模块、定位模块6与控制模块7连接。
所述规划模块1以目标实体8为基础,通过重建目标实体8的三维模型,并预设三维模型的结构及及定位过程中进行深度融合的若干模型定位点,生成数据包。本实施例中,用于设备的维修指导,目标实体为待维修设备,通过实现采集的数据重建设备的三维模型,并进行规划,确定设备内待维修处的结构,以及定位中进行深度融合的标志点(即模型定位点),生成数据包。
所述配准模块、光学定位模块同实施例1。
所述追踪模块5包括固定连接的追踪光敏模块和追踪针,所述追踪针定位在待维修设备上,所述追踪光敏模块与所述光学定位模块4配合以便在定位过程中追踪待维修设备的位置。所述定位模块4包括固定连接的定位光敏模块62和若干定位探针61(如图4所示),用于实现待维修设备与三维模型在混合现实模块3中的深度融合。
此外,本发明还提供了一种全息透视定位系统的定位方法,包括以下步骤:
(1)规划,首先重建待维修设备的三维模型,通过事先采集数据重建待维修设备的三维模型,并进行规划,将待维修部位的结构在虚拟可视化的环境中模拟出来,以及定位中进行深度融合的标志点(即模型定位点),生成数据包。通过混合现实设备将待维修设备的实物收集后,混合现实设备可以协助维修人员快速找出有异常的部位,并针对维修的操作过程进行虚拟指导。
规划模块中,模型标志点的规划过程同实施例1。
(2)事前准备,首先将规划模块1、光学定位模块4、混合现实模块3与控制模块7连接,然后校验所述校准模块2的位置(通过调整光学定位模块的位置和角度,使所述校准光敏模块能够被所述光学定位模块探测到)。
(3)信息加载,启动所述混合现实模块3,控制系统7将数据包发送给混合现实模块3,混合现实模块3加载数据包,得到三维模型与其上预设的若干模型定位点的信息。
(4)配准,将校准模块2放置到待维修设备处,调整光学定位模块4的位置和角度,通过所述校准模块2获得同一空间位置在所述混合现实模块3与所述光学定位模块4之间的坐标转换矩阵
(5)追踪,把追踪模块5的追踪针通过固定在待维修设备上并调整方向,确保追踪光敏模块能够被光学追踪模块识别到,以便实时追踪待维修设备的位置。
(6)定位,用所述定位模块6上的定位探针61按照顺序在待维修设备上依次选择定位点,所述光学定位模块6通过追踪定位光敏模块62的空间位置与姿态,通过计算得到若干定位探针61在所述光学定位模块4中的空间位置坐标,再通过转换矩阵
其他条件或算法同实施例1。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
- 一种全息透视定位系统及定位方法
- 一种基于头戴式增强现实设备的颅内病变体表全息投影定位系统