基于机器人的超声自动扫查设备
文献发布时间:2023-06-19 11:06:50
技术领域
本发明属于超声设备技术领域,涉及基于机器人的超声自动扫查设备。
背景技术
通过超声设备对被检体进行超声检查时,自动扫查已经成为日后发展的必然趋势。虽然有一些机械臂已经被利用到超声诊断中,即超声诊断设备通过一个机械臂前端固定一个超声探头和摄像头,实现病灶的定位和扫查,但是,现有的超声探头和摄像头是直接漏在外面,缺乏保护装置,且超声探头工作时,需要手动进行导声胶的涂抹。
发明内容
本发明的目的在于提供一种基于机器人的超声自动扫查设备,能解决上述的问题。
按照本发明提供的技术方案:一种基于机器人的超声自动扫查设备,包括:
机械臂;
探头支架,设置在所述机械臂的自由端,所述探头支架具有容纳腔体,以及与所述容纳腔体连通的第一开口和第二开口;
超声探头,设置在所述容纳腔体内;
第一推送机构,设置在所述探头支架上且与所述超声探头传动连接,以控制所述超声探头通过所述第一开口部分伸出所述容纳腔体;
摄像头支架,所述摄像头支架上设有摄像头;
第二推送机构,设置在所述容纳腔体内,与所述摄像头支架连接以控制所述摄像头通过所述第二开口进出所述容纳腔体;
展合机构,与所述摄像头支架连接以在所述第二推送机构带动所述摄像头支架伸出所述容纳腔体时,同步控制所述摄像头支架向远离所述探头支架的方向伸展,在所述第二推送机构带动所述摄像头支架进入所述容纳腔体时,同步控制所述摄像头支架向靠近所述探头支架的方向闭合;
转动机构,与所述摄像头支架连接,在所述展合机构控制所述摄像头支架完全伸展后控制所述摄像头支架转动。
作为本发明的进一步改进,所述第二推送机构包括第二推送驱动装置、第二推送传动结构;
所述第二推送驱动装置通过第二传动连接结构连接所述第二推送传动结构,所述第二推送传动结构通过第二连接结构推送所述摄像头支架移动。
作为本发明的进一步改进,所述第二推送驱动装置为电机,所述电机安装在探头支架中;
所述第二推送传动结构包括丝杆,所述丝杆一端转动安装在所述探头支架中,所述丝杆中螺纹套设螺母座;
所述第二推送传动结构包括主动齿轮和从动齿轮,所述主动齿轮固定安装在所述电机输出轴上,所述从动齿轮固定安装在所述丝杆上;
第二连接结构包括连接螺栓和连接通孔,所述连接通孔分别设在所述螺母座和所述摄像头支架上,所述连接螺栓依次穿过所述螺母座和所述摄像头支架上的连接通孔后套设第二连接螺母。
作为本发明的进一步改进,所述第二推送机构一侧设置第二推送导向机构。
作为本发明的进一步改进,所述第二推送导向机构包括导杆和与之适配的导向口;
所述导杆竖直设置于所述探头支架中,所述导向口开于所述螺母座上。
作为本发明的进一步改进,所述丝杆顶部设置限位盘。
作为本发明的进一步改进,所述转动机构包括转动驱动装置,所述转动驱动装置通过转动传动结构带送所述摄像头支架转动;
所述转动驱动装置通过转动传动连接结构连接所述转动传动结构,所述转动传动结构通过转动连接结构推送所述摄像头支架转动。
作为本发明的进一步改进,所述展合机构包括展合驱动装置,所述展合驱动装置通过展合传动结构带送所述摄像头支架展合;
所述展合驱动装置通过展合传动连接结构连接所述展合传动结构,所述展合传动结构通过展合连接结构带动所述摄像头支架展合;
所述摄像头支架包括支架固定板,所述支架固定板通过铰接轴铰接支架旋转板。
作为本发明的进一步改进,所述展合驱动装置为电机,所述电机安装在所述探头支架中;
所述展合传动结构包括丝杆、展合齿条、展合齿轮,所述丝杆一端展合安装在所述探头支架中,所述丝杆中螺纹套设螺母座,所述展合齿条竖直安装在所述探头支架中,展合齿轮固定连接在所述铰接轴侧面;
所述展合传动结构包括主动齿轮和从动齿轮,所述主动齿轮固定安装在所述电机输出轴上,所述从动齿轮固定安装在丝杆上;
所述展合连接结构包括连接螺栓和连接通孔,所述连接通孔分别设在所述螺母座和所述支架固定板上,所述连接螺栓依次穿过所述连接通孔后套设连接螺母。
作为本发明的进一步改进,所述摄像头支架上设置锁紧机构,所述锁紧机构为所述铰接轴,所述铰接轴为阻尼铰接轴。
本申请的积极进步效果在于:
本发明结构简单,占用空间小;超声探头和摄像头在收纳时得到保护,且能机构集成度高,生产成本低。
附图说明
图1为本发明的结构示意图。
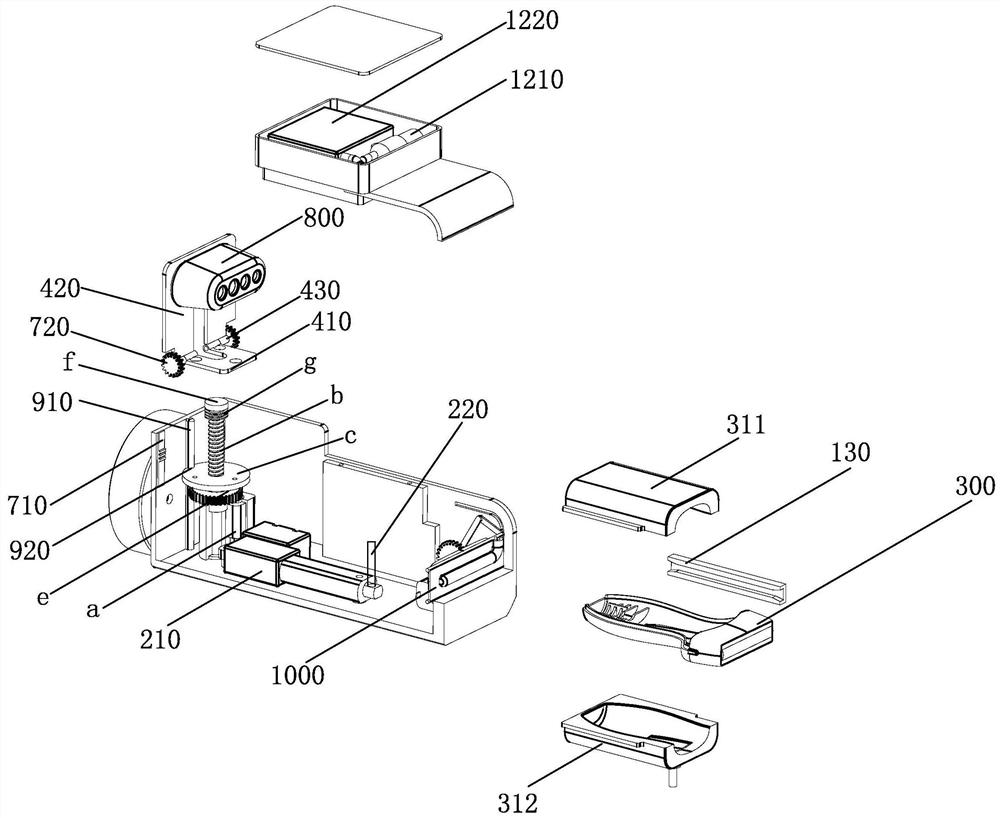
图2为本发明的分解结构示意图。
图3为本发明第二推送机构工作状态的结构示意图。
图4为本发明转动机构工作状态的结构示意图。
图5为本发明展合机构工作状态的结构示意图。
图6为为本发明与机械臂连接的结构示意图。
具体实施方式
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互结合。下面将参考附图并结合实施例来详细说明本发明。
为了使本领域技术人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖他的包括,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
图1-6中,包括探头支架100、第一推送机构200、超声探头300、摄像头支架400、展合机构700、装摄像头800等。
如图1-2所示,本发明是一种基于机器人的超声自动扫查设备,包括探头支架100,如图4-5所示,探头支架100靠近患者的端部为第一端,远离患者的的端部为第二端,探头支架100为中空结构,内部为超声探头容纳腔体110和摄像头容纳腔体120,超声探头容纳腔体110一侧设有与其连通的超声探头开口150,摄像头容纳腔体120一侧设有与其连通的摄像头开口160。探头支架100中通过第一推送机构200驱动超声探头300移动,探头支架100中通过第二推送机构500驱动摄像头支架400移动,摄像头支架400通过转动机构600驱动摄像头支架400转动,摄像头支架400通过展合机构700驱动摄像头支架400展合,摄像头支架400中安装摄像头800。
如图6所示,机械臂一端与其他部件相连为连接端,另一端可以围绕连接端转动为自由端。探头支架100与机械臂自由端连接。
第一推送机构200包括推送驱动装置、推送传动结构、推送执行件。
推送驱动装置通过推送传动结构带动推送执行件运动,实现超声探头300直线位置的切换。
第一推送机构200可以安装在探头支架100外部,也可以安装在超声探头容纳腔体110中。
在本实施例中推送驱动装置为电动推杆210,电动推杆210安装在探头支架100下部。
推送传动结构为螺纹连接。
推送执行件为探头连接杆220,探头连接杆220下端连接电动推杆210移动端,探头连接杆220上端连接超声探头300。
在其他实施例中,在本实施例中推送驱动装置为移动电机,移动电机安装在探头支架100底部。
推送传动结构为丝杆传动结构。丝杆转动设置在探头支架100内部,并由移动电机驱动。
推送执行件为螺母座,螺母座套设在丝杆外周,并连接超声探头300。为了便于螺母座连接超声探头300,在探头支架100上开设螺母座避让槽。
为了保持超声探头300移动时的稳定性,在探头支架100内设置超声探头轨道,超声探头300在超声探头导轨上滑动。
为了避免探头连接杆220直接连接超声探头300,对超声探头300造成损失,在超声探头300外周套设探头护套310。
探头护套310由弹性材料制成,为分体结构。由探头上护套311和探头下护套312组合而成。探头护套310内部为探头安装腔,与超声探头300外形适配。探头护套310底部开有连接槽,用来与探头连接杆220上端部连接。
为了保持摄像头支架400移动时的稳定性,在探头支架100上设置摄像头轨道130,摄像头支架400在摄像头导轨130上滑动。
如图2-3所示,第二推送机构500包括第二推送驱动装置,第二推送驱动装置通过连接第二推送传动结构推送摄像头支架400移动,实现摄像头支架400向摄像头开口160移动。
第二推送驱动装置通过第二传动连接结构连接第二推送传动结构,第二推送传动结构通过第二连接结构推送摄像头支架400移动,实现摄像头支架400向摄像头开口160移动。
在本实施例中,第二推送驱动装置为电机a,电机a安装在探头支架100中,电机a输出轴竖直向上。
第二推送传动结构包括丝杆b,丝杆b呈垂直设置,丝杆b一端转动安装在探头支架100中,丝杆b中螺纹套设螺母座c。
第二推送传动结构包括主动齿轮d和从动齿轮e,主动齿轮d固定安装在电机a输出轴上,从动齿轮e固定安装在丝杆b上,主动齿轮d和从动齿轮e相啮合。
第二连接结构包括连接螺栓和连接通孔,连接通孔分别设在螺母座c和摄像头支架400上,连接螺栓依次穿过螺母座c和摄像头支架400上的连接通孔后套设第二连接螺母,完成第二推送传动结构与摄像头支架400的连接。
电机a通过齿轮结构带动丝杆b转动,螺母座c沿着丝杆b上下移动,带动摄像头支架400出入摄像头开口160。
为了使摄像头支架400在上下移动过程中更稳定,在第二推送机构500一侧设置第二推送导向机构900。
在本实施例中第二推送导向机构900包括导杆910和与之适配的导向口920。导杆910竖直设置于探头支架100中,导向口920开于螺母座c上,导向口920位于导杆910外周。
为了防止螺母座c滑出丝杆b,在丝杆b顶部设置限位盘f。
如图2、4所示,转动机构600包括转动驱动装置,转动驱动装置通过转动传动结构带送摄像头支架400转动。
转动驱动装置通过转动传动连接结构连接转动传动结构,转动传动结构通过转动连接结构推送摄像头支架400转动,实现摄像头支架400向摄像头开口160移动。
在本实施例中,转动驱动装置为电机a,电机a安装在探头支架100中,电机a输出轴竖直向上。
转动传动结构包括丝杆b,丝杆b呈垂直设置,丝杆b一端转动安装在探头支架100中,丝杆b中螺纹套设螺母座c。
转动传动结构包括主动齿轮d和从动齿轮e,主动齿轮d固定安装在电机a输出轴上,从动齿轮e固定安装在丝杆b上,主动齿轮d和从动齿轮e相啮合。
转动连接结构包括连接螺栓和连接通孔,连接通孔分别设在螺母座c和摄像头支架400上,连接螺栓依次穿过螺母座c和摄像头支架400上的连接通孔后套设连接螺母,完成转动传动结构与摄像头支架400的连接。
电机a通过齿轮结构带动丝杆b转动,螺母座c沿着丝杆b上下移动的同时带这摄像头支架400进行转动。
摄像头支架400包括支架固定板410和支架旋转板420,支架固定板410上开有连接通孔,支架固定板410一侧通过铰接轴430铰接支架旋转板420,铰接轴430一端与支架旋转板420固定连接,另一端转动安装于支架固定板410中,支架旋转板420上安装摄像头800。
如图2、5所示,展合机构700包括展合驱动装置,展合驱动装置通过展合传动结构带送摄像头支架400展合。
展合驱动装置通过展合传动连接结构连接展合传动结构,展合传动结构通过展合连接结构带动摄像头支架400展合,实现摄像头800位置的转换。
在本实施例中,展合驱动装置为电机a,电机a安装在探头支架100中,电机a输出轴竖直向上。
展合传动结构包括丝杆b、展合齿条710、展合齿轮720,丝杆b呈垂直设置,丝杆b一端展合安装在探头支架100中,丝杆b中螺纹套设螺母座c。展合齿条710竖直安装在探头支架100中,展合齿轮720固定连接在铰接轴430侧面。
展合传动结构包括主动齿轮d和从动齿轮e,主动齿轮d固定安装在电机a输出轴上,从动齿轮e固定安装在丝杆b上,主动齿轮d和从动齿轮e相啮合。
展合连接结构包括连接螺栓和连接通孔,连接通孔分别设在螺母座c和支架固定板410上,连接螺栓依次穿过螺母座c和支架固定板410上的连接通孔后套设连接螺母,完成展合传动结构与摄像头支架400的连接。
为了便于摄像头支架400展合后固定,在摄像头支架400上设置锁紧机构。
在本实施例中,锁紧机构为铰接轴430,铰接轴430为阻尼铰接轴。
电机a通过齿轮结构带动丝杆b转动,螺母座c带着摄像头支架400沿着丝杆b上下移动,当展合齿轮720与展合齿条710啮合时,展合齿条710通过铰接轴430带动支架旋转板420相对支架固定板410展合。
当展合齿轮720与展合齿条710脱离时,阻尼铰接轴430使支架旋转板420与支架固定板410相对固定。
在其他实施例中,第二推送机构500为第二推送气缸,第二推送气缸为竖直设置,第二推送气缸缸体安装在探头支架100中,第二推送气缸活塞端连接摄像头支架400。
转动机构600为直线移动装置,直线移动装置通过齿轮齿条结构带动摄像头支架400转动。
直线移动装置为直线气缸,直线气缸位于第二推送气缸活塞端上,直线气缸活塞端连接齿条,摄像头支架400上安装转动齿轮,齿条由直线气缸驱动,带动转动齿轮及摄像头支架400实现转动。
展合机构700包括展合气缸,展合气缸缸体端、展合气缸活塞端分别与支架固定板410、支架旋转板420铰接。通过展合气缸活塞杆的伸缩来实现摄像头支架400的展合。
本发明的工作过程如下:
超声探头300前进,伸出探头支架100中的超声探头容纳腔体110。
电机a通过齿轮结构带动丝杆b转动,螺母座c被导杆910限制旋转,智能沿着丝杆b向上移动,在带动摄像头支架400伸出摄像头开口160的过程中,展合齿轮720与展合齿条710相啮合,随着展合齿轮720的上移,展合齿条710配合展合齿轮720产生转动,使支架旋转板420相对支架固定板410展开,摄像头800处于工作位。
电机a继续带动螺母座c上升,当螺母座c脱离导杆910限制时,且受到丝杆b顶端限位盘f的阻挡时,螺母座c做水平转动,摄像头800可以根据工作要求,记录更多的内容。
为了便于导杆910再次套入螺母座c上的导向口920中,在限位盘f与螺母座c之间设置复位弹簧g。复位弹簧g使螺母座c始终具有向下的下行力。
可以理解的是,以上实施方式仅仅是为了说明本发明的原理而采用的示例性实施方式,然而本发明并不局限于此。对于本领域内的普通技术人员而言,在不脱离本发明的精神和实质的情况下,可以做出各种变型和改进,这些变型和改进也视为本发明的保护范围。
- 基于超声扫查的机器人系统及其扫查方法
- 基于机器人的超声自动扫查设备