一种激光美容系统及设备
文献发布时间:2023-06-19 11:22:42
技术领域
本发明实施例涉及美容仪器技术领域,尤其涉及一种激光美容系统及设备。
背景技术
当前医美行业需求越来越旺盛,激光美容仪收到越来越多人的欢迎。激光美容仪器虽然对人体安全没有危害,但是会或多或少的存在各种副作用或者后遗症,并没有百分百的无副作用的产品。使用的激光仪器普遍使用功率相对较高,直接照射在一定面积的待处理部位,利用选择性的光热作用,进行烧蚀微创,很容易对待处理部位的周围造成一定的影响。同时传统激光采用边发射激光器,光束质量较差,定位精度较低,实际光斑并不是完全的集中在一个点,容易造成周围正常部位损伤的风险。
发明内容
本发明实施例提供一种激光美容系统及设备,以实现对待探测物的位置信息进行实时识别,提高定位的精准度。
第一方面,本发明实施例提供了一种激光美容系统,所述激光美容系统包括激光发射模块、光线调节模块、三维定位模块、信息处理模块以及驱动模块;
所述光线调节模块设置于所述激光发射模块的出光侧;
所述三维定位模块包括探测信息输出端;所述信息处理模块包括探测信息接收端和位置信息输出端;所述驱动模块包括位置信息接收端、第一控制信息输出端和第二控制信息输出端;所述激光发射模块包括第一控制信息接收端;所述光线调节模块包括第二控制信息接收端;
所述探测信息输出端与所述探测信息接收端电连接,所述位置信息输出端与所述位置信息接收端电连接,所述第一控制信息输出端与所述第一控制信息接收端电连接,所述第二控制信息输出端与所述第二控制信息接收端电连接。
可选的,所述三维定位模块包括激光出射单元和激光接收单元;
所述激光出射单元用于向待探测物出射激光探测光束;
所述激光接收单元用于接收经所述待探测物反射的激光反射光束,所述激光反射光束包含所述待探测物的探测信息。
可选的,所述三维定位模块包括微电子机械系统。
可选的,所述光线调节模块包括转动单元和棱镜单元;
所述棱镜单元设置于所述转动单元上,所述转动单元用于带动所述棱镜单元转动。
可选的,所述激光发射模块用于发射激光工作光束;
经所述光线调节模块后的所述激光工作光束的视场范围与所述三维定位模块出射的激光探测光束的视场范围相同。
可选的,所述驱动模块还包括第三控制信息输出端,所述三维定位模块还包括第三控制信息接收端,所述第三控制信息输出端与所述第三控制信息接收端电连接;
所述驱动模块用于控制所述三维定位模块出射激光探测光束。
可选的,所述激光美容系统还包括电路板,所述激光发射模块、所述驱动模块以及所述信息处理模块均固定于所述电路板上。
可选的,所述激光发射模块包括VCSEL激光器。
第二方面,本发明实施例还提供了一种激光美容设备,所述激光美容设备包括任意所述的激光美容系统。
可选的,所述激光美容设备还包括壳体;所述激光美容系统设置于所述壳体内。
本发明通过提供一种激光美容系统及设备,激光美容系统包括激光发射模块、光线调节模块、三维定位模块、信息处理模块以及驱动模块。光线调节模块设置于激光发射模块的出光侧。三维定位模块包括探测信息输出端,用于获取待探测物的探测信息。信息处理模块包括探测信息接收端和位置信息输出端,用于根据探测信息确定待探测物的位置信息。驱动模块包括位置信息接收端、第一控制信息输出端和控制信息输出端,用于根据位置信息向激光发射模块传输第一控制信息,向光线调节模块传输第二控制信息。激光发射模块包括第一控制信息接收端,用于根据第一控制信息出射激光工作光束。光线调节模块包括第二控制信息接收端;探测信息输出端与探测信息接收端电连接,位置信息输出端与位置信息接收端电连接,第一控制信息输出端与第一控制信息接收端电连接,第二控制信息输出端与第二控制信息接收端电连接,用于根据第二控制信息调节激光工作光束的出射位置至待探测物。本发明实施例提供的激光美容系统有效提高对待探测物的位置信息实时识别和辨别,保证定位精确度,提高作业效果。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做一简单地介绍,显而易见地,下面描述中的附图虽然是本发明的一些具体的实施例,对于本领域的技术人员来说,可以根据本发明的各种实施例所揭示和提示的器件结构,驱动方法和制造方法的基本概念,拓展和延伸到其它的结构和附图,毋庸置疑这些都应该是在本发明的权利要求范围之内。
图1为本发明实施例提供的一种激光美容系统的结构示意图;
图2为本发明实施例提供的另一种激光美容系统的结构示意图;
图3为本发明实施例提供的一种激光美容系统的工作示意图;
图4为本发明实施例提供的一种激光美容设备的结构示意图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,以下将参照本发明实施例中的附图,通过实施方式清楚、完整地描述本发明的技术方案,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例所揭示和提示的基本概念,本领域的技术人员所获得的所有其他实施例,都属于本发明保护的范围。
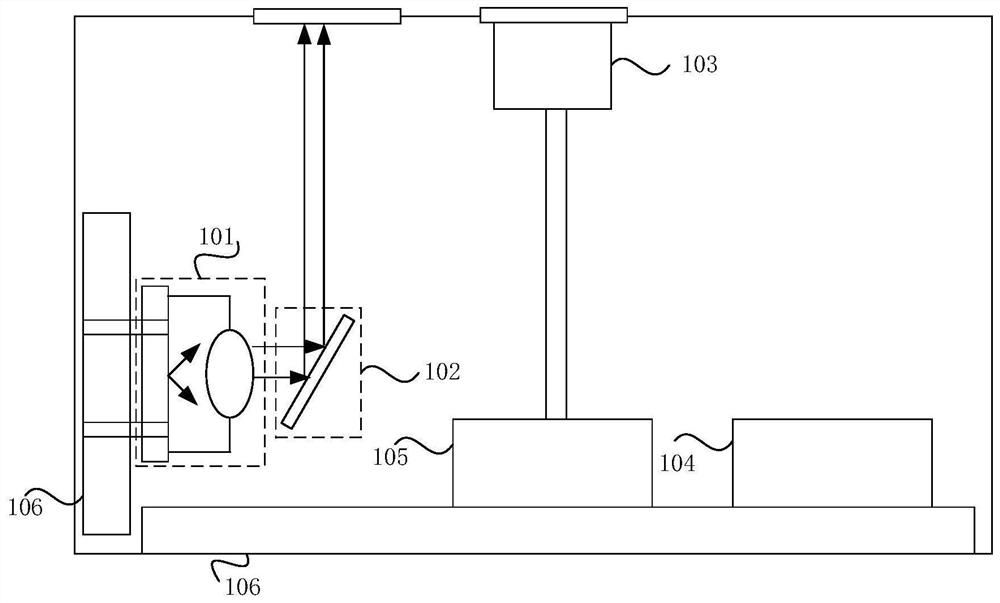
图1为本发明实施例提供的一种激光美容系统的结构示意图,图2为本发明实施例提供的另一种激光美容系统的结构示意图,如图1和图2所示,该激光美容系统100包括激光发射模块101、光线调节模块102、三维定位模块103、信息处理模块104以及驱动模块105。光线调节模块102设置于激光发射模块101的出光侧。三维定位模块103包括探测信息输出端1031。信息处理模块104包括探测信息接收端1041和位置信息输出端1042。驱动模块105包括位置信息接收端1051、第一控制信息输出端1052和第二控制信息输出端1053。激光发射模块101包括第一控制信息接收端1011;光线调节模块102包括第二控制信息接收端1021。探测信息输出端1031与探测信息接收端1041电连接,位置信息输出端1042与位置信息接收端1051电连接,第一控制信息输出端1052与第一控制信息接收端1011电连接,第二控制信息输出端1053与第二控制信息接收端1021电连接。
其中,三维定位模块103用于获取待探测物的探测信息。信息处理模块104用于根据探测信息确定待探测物的位置信息。驱动模块105用于根据位置信息向激光发射模块101传输第一控制信息,向光线调节模块102传输第二控制信息。激光发射模块101用于根据第一控制信息出射激光工作光束。光线调节模块102用于根据第二控制信息调节激光工作光束的出射位置至待探测物。
激光发射模块101可以根据实际使用需求选择不同类型的激光器,控制出射激光的功率、光斑形状及光斑质量,实现对待探测物进行清除和治疗。三维定位模块103具备三维实时建模的功能,对于立体的待探测区域表面的识别定位精确,可达到1%以内的深度和精度,且不受室内光线的明暗影响。三维定位模块103的探测信息输出端1031实时出射激光探测光束,获取待探测物的探测信息,并对探测信息进行三维定位建模。信息处理模块104的探测信息接收端1041实时接收三维定位模块103的三维定位建模后的探测信息,对探测信息进行信息处理,形成准确的待探测物的三维的位置信息,通过信息处理模块104的位置信息输出端1042输出至驱动模块105的位置信息接收端1051,驱动模块105根据接收到的位置信息输出控制信号,包括利用驱动模块105的第一控制信息1052输出端输出第一控制信息,激光发射模块101的第一控制信息接收端1011接收第一控制信息,第一控制信息用于驱动激光发射模块101出射激光工作光束;利用驱动模块105的第二控制信息输出端1053输出第二控制信息,光线调节模块102的第二控制信息接收端1021接收第二控制信息,第二控制信息用于调整光线调节模块102的角度,光线调节模块102设置于激光发射模块101的出光侧,对激光发射模块101出射的激光工作光束进行实时的光线调节,保证激光工作光束的出射位置准确到达待探测物。
本发明实施例的技术方案通过合理设置激光美容系统中激光发射模块、光线调节模块、三维定位模块、信息处理模块以及驱动模块之间的连接关系,保证经过三维定位模块探测到待探测物的探测信息能最终使得激光发射模块出射的激光能准确到达待探测物,提高激光美容系统的整体工作效率以及精准度,减少对人体的危害。
可选的,三维定位模块103包括激光出射单元1033和激光接收单元1034。激光出射单元1033用于向待探测物出射激光探测光束。激光接收单元1034用于接收经待探测物反射的激光反射光束,激光反射光束包含待探测物的探测信息。
可选的,激光发射模块101可以包括VCSEL激光器。
其中,激光发射模块101可以为VCSEL激光器,也可以为EEL激光器等不同类型的激光器,出射的激光工作光束存在差异。相比与传统激光美容采用的边发射激光器,光束质量差,光斑不能集中于一个待探测物,容易造成待探测点周围的区域损伤的风险。以VCSEL激光器为例,VCSEL激光器为垂直共振腔表面放射激光器,以砷化镓半导体材料为基础研制的一种半导体激光器。VCSEL激光器具有低阈值电流、稳定单波长工作、可高频调制、容易二维集成、没有腔面阈值损伤等优点,其出射激光垂直于顶面射出,与传统的边发射激光器的由边缘射出激光的方式不同,可以实现很好的横向光场限制,可以精确控制探测区域且工作光束功率高、光斑呈圆形、发散角小,安全性更强。
激光接收单元1034可以为PD接收器,PD接收器可以接收光信号。示例性的提供一种三维定位模块103获取待探测物的探测信息的计算方式,本发明实施例不做具体限定。三维定位模块103可根据激光出射单元1033出射激光探测光束的时间t1以及激光接收单元1034接收经待探测物反射的激光反射光束的时间t2,激光出射单元1033出射激光的光速v,根据公式
可选的,三维定位模块103可以包括微电子机械系统。
其中,三维定位模块103在激光出射单元1033的出光侧设置有微电子机械系统(MEMS),微电子机械系统可以调节激光出射单元1033的视场,它具有体积小、重量轻、成本低、功耗低、可靠性高、易于集成和实现智能化的特点,可用于对激光出射单元向待探测物出射激光探测光束进行实时的发射角度调整,在随着待测区域的移动,保证激光探测光束可精确实现对待测区域内待探测物的探测,同时微电子机械系统本身具有一定的视场角,可以保证不需要对三维定位模块103进行转动,使得激光探测光束在视角范围内完成对待探测物的探测。
可选的,光线调节模块102包括转动单元1023和棱镜单元1022。棱镜单元1022设置于转动单元1023上,转动单元1023用于带动棱镜单元1022转动。
其中,棱镜单元1022可以为反射镜,用于对激光发射模块101出射的激光进行反射。转动单元1023接收驱动模块105的第二控制信息,转动单元1023可以包括转动线圈和霍尔传感器,根据接收到的第二控制信息以实现带动棱镜单元1022转动,保证激光发射模块101出射的激光光束可精确到达待探测物,对待探测物进行治疗和清除。
可选的,激光发射模块101用于发射激光工作光束。经光线调节模块102调节后的激光工作光束的视场范围与三维定位模块103出射的激光探测光束的视场范围相同。
其中,图3为本发明实施例提供的一种激光美容系统的工作示意图,如图3所示,经光线调节模块102后的激光工作光束的视场范围与三维定位模块103出射的激光探测光束的视场范围相同,保证在三维定位模块103的探测视场范围内的待探测物均能被经光线调节模块102后的激光工作光束所治疗和处理。同时激光工作光束可调节角度,可根据三维定位于模块103对待探测物的定位识别,完成一个待探测物的清除后,信息处理模块104根据三维定位模块103发送的下一个未处理的待探测物的探测信息计算并输出下一个未处理的待探测物的位置信息,驱动模块105接收下一个未处理的探测物的位置信息输出第二控制信息控制光线调节模块102转动,使激光发射模块101出射的激光工作光束经光线调节模块102切换至下一个未处理的待探测物处。在三维定位模块103工作时,激光发射模块101、光线调节模块102、信息处理模块104以及驱动模块105均处于工作状态,由于待探测区域存在移动的可能,以实现对待探测物的实时识别追踪处理,大幅度提高对待探测物清除的效率。进一步的,激光工作光束的出光位置与激光探测光束的出光位置可相邻设置于同一水平面上,进一步保证经光线调节模块102的激光工作光束的视场范围与三维定位模块103出射的激光探测光束的视场范围相同,同时也降低了激光美容系统的制作工艺难度。
可选的,驱动模块105还包括第三控制信息输出端1054,三维定位模块103还包括第三控制信息接收端1032,第三控制信息输出端1054与第三控制信息接收端1032电连接。驱动模块105用于控制三维定位模块103出射激光探测光束。
其中,驱动模块105的第三控制信息输出端104与三维定位模块103的第三控制信息接收端1032,三维定位模块103的第三控制信息接收端1032将接收到的控制信息发送至激光出射单元1033,三维定位模块103控制激光出射单元1033出射激光探测光束,达到驱动模块105对三维定位模块103的实时控制。
可选的,激光美容系统100还包括电路板106,激光发射模块101、驱动模块105以及信息处理模块104均固定于电路板106上。
其中,激光发射模块101、驱动模块105以及信息处理模块104均固定于电路板106上,电路板106连接外部电源,实现对激光发射模块101、驱动模块105以及信息处理模块104的供电,保证激光美容系统的正常有序工作。
图4为本发明实施例提供的一种激光美容设备的结构示意图,如图4所示,激光美容设备200包括上述任意一项的激光美容系统201。
可选的,激光美容设备200还包括壳体202;激光美容系统201设置于壳体202内。
本发明实施例所提供的激光美容设备可执行本发明上述实施例所提供任意一项的激光美容系统,具备执行方法相应的功能模块和有益效果。
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整、相互组合和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
- 一种激光美容系统及设备
- 一种激光美容设备及其控制方法