一种仿生纤毛结构的多信息柔性触觉传感器及其制备方法
文献发布时间:2023-06-19 11:40:48
技术领域
本发明属于仿生触觉传感领域,具体涉及一种仿生纤毛结构的多信息柔性触觉传感器及其制备方法。
背景技术
传感器是环境信号检测的主要组成部分,是现代信息采集系统的基础。随着制造技术和网络信息科技的提升与突破,传感器正朝着小型化、网络化和智能化的方向快速发展。传统传感器具有柔韧性差、不可拉伸等缺点,限制了其应用范围。近年来,柔性传感器因其在可穿戴电子、人造皮肤、机器人和医疗保健等领域的良好应用前景而引起了人们的广泛关注。柔性传感器的突破使得大规模制造低成本、性能优越的柔性电子产品成为可能。通过结构设计,柔性传感器能够实现对各种机械信号(如拉、压、剪切、弯曲、扭转以及振动等)和环境刺激信号(如温度、湿度、气流等)的监测。
机器人通常需要传感器来感知外界环境变化,进而实现精确的运动控制。然而,传统的刚性传感器无法满足软体机器人对大变形测量的需求。此外,刚性传感器还会对机器人的驱动产生干扰。为了突破这些限制,可利用柔性传感器替代刚性传感器,实现对环境温度、湿度、机械刺激等信号的感知。例如,将柔性、可拉伸的触觉传感器用于机械手或手术手套,可使其获得触摸、抓握等感觉,通过对物体形态和硬度的感知,从而区分出人体器官和操作仪器;在不影响运动的情况下,将可承受大变形的柔性触觉传感器安装在机器人关节处,从而实现机器人的精确操控,以避免机器人与其他物体之间的碰撞。
仿生传感器是通过模仿生物结构或传感机理而开发的新型传感器,可以实现常规方法无法实现的功能和特点,例如,皮肤是人体最大的器官,可以保护我们的身体免受外部伤害。同时,皮肤也是实现对外界信号感知的传感器器官,可以检测各种形状、纹理、温度变化以及不同程度接触压力。模仿人体皮肤结构制备的柔性电子皮肤,可以很好的贴合在非平面表面,进而可用于人体健康监测、健身和运动性能跟踪。此外,通过研究生物结构和传感机理来设计和改进工艺,可以使传感器具有某些生物的独特性能。在进化过程中,许多动物通过纤毛结构感知外界的环境信号,它可以监测气流、位移等信息,并对附近物体进行空间映射与触觉感知。例如蜘蛛腿部纤毛、蟋蟀尾部纤毛、海豹胡须以及大鼠胡须等均是极其敏感的生物感受器,这些生物通过纤毛结构获取周围环境信息并反馈给大脑,用于决定接下来的行为动作。目前研究人员已经制备出各种仿生纤毛传感器。然而,这些纤毛传感器大多是刚性的,不适合作为柔性可穿戴设备。同时,目前的仿生纤毛传感器功能单一,大多只能检测单一的待测信号,严重制约了传感器的应用范围,不能适应未来复杂环境对高性能传感器的需求。因此,发展新型材料和制造技术有助于提高传感能力,开发出接近或优于自然系统敏感度的仿生纤毛传感器。
将仿生结构与柔性传感器材料相结合,研制出具有仿生结构的柔性触觉传感器已经成为当下触觉领域研究热点,通过柔性材料与仿生结构设计,模拟生物的传感机理,有望制备出多功能、高灵敏度的柔性触觉传感器。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种具有高灵敏度、稳定性好、抗干扰能力强的仿生纤毛结构的多信息柔性触觉传感器及其制备方法。
本发明的目的可以通过以下技术方案来实现:
一种仿生纤毛结构的多信息柔性触觉传感器,包括相互结合作用的纤毛阵列传感单元和压电薄膜传感单元,纤毛阵列传感单元包括12个纤毛传感器以矩形阵列形式共置于一个公共基质层上,纤毛传感器包括从内至外层层设置的内电极、压电传感层、屏蔽层以及护套保护层,内电极采用导电金属材料,压电传感层采用压电材料,护套保护层采用聚合物材料,对纤毛传感器整体起保护作用,每根纤毛传感器的内电极分别引出信号线,屏蔽层引出接地引线;
压电薄膜传感单元从上至下分为上电极层、压电薄膜层、凸点层、下电极层和保护层,压电薄膜层采用PVDF纳米纤维薄膜,凸点层为经过加工的铜箔,铜箔表面以阵列形式排布有多个半球状凸点结构,在上电极层上引出信号电极,在下电极层上引出接地电极;
多通道信号调理电路设置有与每根纤毛传感器一一对应的信号输入端子以及一个额外的与信号电极的引出线连接的信号输入端子,每根纤毛传感器的内电极引出的信号线分别连接于多通道信号调理电路的对应的信号输入端子,信号电极的引出线连接于多通道信号调理电路的另一个信号输入端子,屏蔽层引出的接地引线以及接地电极的引出线共同连接于多通道信号调理电路的接地端子。
进一步的技术方案包括:
公共基质层的材料为聚二甲基硅氧烷。
纤毛传感器以内电极为中心,内电极采用导电银柱或铜柱,在内电极外表面涂敷压电传感层,屏蔽层上覆盖有铜网,在屏蔽层外部用聚二甲基硅氧烷制备成护套保护层。
压电薄膜层的材料为PVDF纳米纤维,PVDF纳米纤维的纤维层厚度为50-500微米。
凸点层的铜箔厚度为50-200微米,铜箔上的多个凸点结构的分布方式采用矩形阵列或环形阵列。
保护层采用聚合物材料,具体采用聚对苯二甲酸乙二醇酯或聚二甲基硅氧烷。
本发明还提供了一种仿生纤毛结构的多信息柔性触觉传感器的制备方法,具体步骤如下:
(1)制备公共基质层:
将PDMS预聚物与固化剂以10:1的比例充分混合,配置得到PDMS溶液,将PDMS溶液放入真空干燥器中,去除搅拌过程产生的气泡,将PDMS溶液旋涂在硅片表面,设置前转转速1000-1500r/min,持续时间40s-60s,设置后转转速4000-6000r/min,持续时间60s-90s;随后将PDMS溶液置于80-100℃环境下热固化50-80min,剥离后制得100-500微米厚度的公共基质层;
(2)制备纤毛传感器:
选取半径为0.5mm的高导电性银柱作为内电极,选取100-300微米厚度的PVDF纳米纤维薄膜均匀涂覆在银柱外表面,采用铜丝编织而成的铜网作为屏蔽层螺旋缠绕包裹在PVDF纳米纤维薄膜外侧,将PDMS预聚物与固化剂以8:1的比例配置PDMS溶液,将铜网包裹着的PVDF纳米纤维薄膜以及内电极整体坐落于设计好的纤毛形状结构的模具中,向模具中添加PDMS溶液,在60℃下固化3h,制得纤毛传感器,在内电极处引出信号线,在屏蔽层处引出接地引线,重复本过程以制备12根纤毛传感器;
(3)键合:
使用水溶性胶带将12根纤毛传感器平整拾取,将12根纤毛传感器的底部与水溶性胶带完全粘附,每根纤毛传感器的顶部暴露,在每根纤毛传感器的暴露面上沉积一层铬和一层二氧化硅;将公共基质层置于等离子清洗机中,先用氧气进行表面氧化处理,实现清洁作用,然后迅速将黏有12根纤毛传感器的水溶性胶带与公共基质层热压键合为一个整体后再将其置于水中使得水溶性胶带完全溶解,从而得到纤毛阵列传感单元。
(4)制备压电薄膜传感单元,选取50-500微米厚度的PVDF纳米纤维薄膜作为压电薄膜层,对50-200微米厚度铜箔进行加工,使其表面以矩形阵列或环形阵列的形式均匀分布半球状凸点结构进而制得凸点层,在压电薄膜层下表面垂直放置凸点层,在压电薄膜层上表面通过真空蒸镀方法覆盖100nm厚的铝电极层进而构成上电极层,在凸点层下表面通过真空蒸镀方法覆盖100nm厚的铝电极层进而构成下电极层,在上电极层引出信号电极,下电极层引出接地电极,在下电极层下方进行聚合物封装构成保护层,得到压电薄膜传感单元;
(5)制备多通道信号调理电路:
包括电荷转换、电压放大、低通滤波以及模数转换电路,同时在输入端焊接信号输入端子和接地端子,将内电极引出的信号线一一对应地连接到对应的信号输入端子上,信号电极的引出线连接到其中一个信号输入端子上,将屏蔽层引出接地引线,屏蔽层引出的接地引线以及接地电极的引出线共同连接到多通道信号调理电路的接地端子上。
与现有技术相比,本发明具有以下优点:
(1)纤毛阵列传感单元和压电薄膜传感单元相结合,当纤毛传感器阵列受压时,上部的纤毛阵列传感单元和下部的压电薄膜传感单元均会产生电信号,当纤毛传感器阵列受到横向切应力时,只有上部的纤毛阵列传感单元会产生电信号,实现分离正压力和横向切应力的功能。
(2)当纤毛传感器阵列受到触觉压力作用时,上部的纤毛阵列传感单元和下部的压电薄膜传感单元均会产生电信号;若受到滑觉作用,在滑动过程中,纤毛传感器阵列将会向同一侧弯曲,当弯曲达到最大程度时,通过压电薄膜传感单元输出信号进一步评估滑动过程,对于上部纤毛阵列传感单元输出电信号和下部压电薄膜传感单元输出电信号进行初步数据处理,随后通过多传感器数据融合算法进行深度分析,实现对于触觉和滑觉的有效区分。
(3)纤毛阵列传感单元仿生动物纤毛作用机制,借鉴压电电缆结构,在内电极外表面涂覆压电传感层,外层设计护套保护层,进一步增强了纤毛传感器的可靠性,有效提升了传感器的灵敏度。
(4)压电薄膜传感单元在采用三明治结构的基础上增加了凸点层结构,进一步提高了传感器的灵敏度以及可测量范围。
(5)具有高灵敏度、稳定性好、抗干扰能力强、高柔韧性、使用寿命长等优点,在仿生触觉传感、生物医疗以及机器触觉传感领域有应用价值。
(6)采用聚合物封装,可以使触觉传感器保持良好的柔性,且耐酸、抗腐蚀、耐老化,对传感器有较好的保护作用。
附图说明
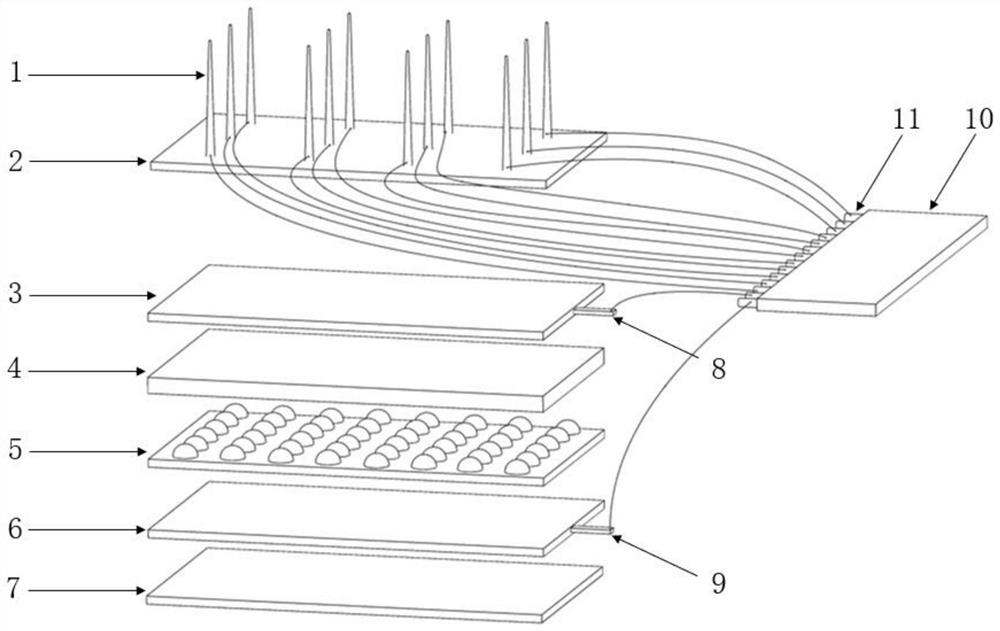
图1为本发明提供的一种仿生纤毛结构的多信息柔性触觉传感器的结构示意图;
图2为本发明中的纤毛传感器的结构示意图;
图3为本发明中的纤毛传感器的俯视示意图;
图4为本发明中的多通道信号调理电路的结构框图;
图中:1.纤毛传感器,2.公共基质层,3.上电极层,4.压电薄膜层,5.凸点层,6.下电极层,7.保护层,8.信号电极,9.接地电极,10.多通道信号调理电路,11.信号输入端子,12.内电极,13.压电传感层,14.屏蔽层,15.护套保护层。
具体实施方式
下面结合附图对本发明进行详细说明。
如图1所示,本发明提供一种仿生纤毛结构的多信息柔性触觉传感器,该柔性触觉传感器由两部分组成,呈纵向分布,上部为纤毛阵列传感单元,下部为压电薄膜传感单元,二者相互作用。
纤毛阵列传感单元包括12个纤毛传感器1,其以矩形阵列形式共置于一个公共基质层2上,公共基质层2材料采用聚二甲基硅氧烷,如图2所示,纤毛传感器1包括从内至外层层设置的内电极12、压电传感层13、屏蔽层14以及护套保护层15。内电极12采用导电金属材料,压电传感层13为PVDF纳米纤维薄膜,均匀涂覆在内电极12外表面,同时压电传感层13被导电材料(铜或铝)组成的屏蔽层14编织包裹,最外层采用聚合物材料制备护套保护层15。压电薄膜传感单元由五部分组成,从上至下为上电极层3、压电薄膜层4、凸点层5、下电极层6和保护层7,压电薄膜层4采用PVDF纳米纤维薄膜,凸点层5采用经过加工的铜箔,铜箔表面以阵列形式排布半球状凸点结构,在上电极层3处引出信号电极8,在下电极层6处引出接地电极9。多通道信号调理电路10设置有与每根纤毛传感器1一一对应的信号输入端子11,每根纤毛传感器1的内电极12引出的信号线分别连接于多通道信号调理电路10的对应的信号输入端子11,信号电极8的引出线连接于多通道信号调理电路10的其中一个信号输入端子11,屏蔽层14引出的接地引线以及接地电极9的引出线共同连接于多通道信号调理电路10的接地端子。
当纤毛传感器阵列受到正压力时,上部的纤毛阵列传感单元和下部的压电薄膜传感单元均会产生电信号,当纤毛传感器阵列受到横向切应力时,只有上部的纤毛阵列传感单元产生电信号,进而实现分离正压力和横向切应力的功能;当纤毛传感器阵列受到触觉压力作用时,上部的纤毛阵列传感单元和下部的压电薄膜传感单元均会产生电信号,若受到滑觉作用,在滑动过程中,纤毛传感器阵列将会向同一侧弯曲,当弯曲达到最大程度时,纤毛阵列传感单元输出电信号将不会发生改变,此时需要通过压电薄膜传感单元输出电信号的变化进一步评估滑动过程,将纤毛阵列传感单元输出电信号和压电薄膜传感单元输出电信号先通过多通道信号调理电路10进行信号预处理,随后采用多传感器数据融合算法对模数转换后的数字信号进行深度分析,实现该传感器对于触觉和滑觉的有效区分。
图3为纤毛传感器俯视示意图,各层结构以内电极为中心,各层之间包裹设计,无隙连接。
该仿生纤毛结构的多信息柔性触觉传感器具有高灵敏度、稳定性好、抗干扰能力强、高柔韧性、使用寿命长等显著优点,可应用于嵌入式和可移植式生物传感器、医疗健康检测设备、机器人触觉传感器、机器人电子皮肤等新兴领域。
下面描述本发明提供的一种仿生纤毛结构的多信息柔性触觉传感器的制备方法:
(1)公共基质层2的制备
将PDMS预聚物与固化剂以10:1的比例充分混合,配置得到PDMS溶液,将PDMS溶液放入真空干燥器中,去除搅拌过程产生的气泡;之后将PDMS溶液旋涂在硅片表面,控制前转转速为1000r/min,持续时间为50s,后转转速为5000r/min,持续时间为60s;再将PDMS溶液置于100℃环境下热固化50分钟,剥离后得到厚度为200微米的PDMS薄膜,裁剪薄膜尺寸为长2cm、宽2cm,制得公共基质层2。
(2)纤毛传感器1的制备
选择高导电性银柱作为内电极,半径选取0.5毫米,截面为正圆形,选取200微米厚度的PVDF纳米纤维薄膜均匀涂覆在银柱外表面,采用铜丝编织而成的铜网作为屏蔽层14,螺旋缠绕包裹在PVDF纳米纤维薄膜外侧,将PDMS预聚物与固化剂以8:1的比例配置PDMS溶液,将铜网包裹着的PVDF纳米纤维薄膜以及内电极整体坐落于设计好的纤毛结构模具中,向模具中添加PDMS溶液,在60℃下固化3h,制得纤毛传感器1,在内电极处引出信号线,在屏蔽层14处引出接地引线,重复以上过程以制备12根纤毛传感器1。
(3)键合
使用水溶性胶带将12根纤毛传感器1平整拾取,将12根纤毛传感器1的底部与水溶性胶带完全粘附,每根纤毛传感器1顶部暴露,在每根纤毛传感器1的暴露面上沉积一层铬和一层二氧化硅;将公共基质层2置于等离子清洗机中,先用氧气进行表面氧化处理,实现清洁作用,然后迅速将黏有12根纤毛传感器1的水溶性胶带与公共基质层2热压键合为一个整体后再将其置于水中使得水溶性胶带完全溶解,从而得到纤毛阵列传感单元。
(4)压电薄膜传感单元的制备
选取500微米厚度的PVDF纳米纤维薄层,裁剪为长2cm、宽2cm的尺寸;通过特定模具,对于100微米厚度的铜箔进行加工,铜箔表面以矩形阵列形式排布半球状凸点结构,各凸点间距为1mm,裁剪尺寸为长2cm、宽2cm的大小,制得凸点层5;在压电薄膜层4上表面通过真空蒸镀方法覆盖100nm厚的铝电极层进而构成上电极层3,在凸点层5下表面通过真空蒸镀方法覆盖100nm厚的铝电极层,构成下电极层6;通过导电银胶粘结方式,在上电极层3处引出信号电极8,在下电极层6处引出接地电极9;最后在下电极层6下方用聚对苯二甲酸乙二醇酯材料进行封装固化,构成保护层7,制成压电薄膜传感单元。
(5)多通道信号调理电路的制备
多通道信号调理电路10包括电荷转换电路、电压放大电路、低通滤波电路以及模数转换电路,从前至后,分别实现电荷/电压信号转换、放大滤波以及模数转换功能,同时焊接13个信号输入端子11以及1个接地端子,得到多通道信号调理电路10。
将12个纤毛传感器1的内电极12引出的信号线以及下部的压电薄膜传感单元的信号电极8的引出线分别连接到多通道信号调理电路10对应的信号输入端子11上,将屏蔽层14引出的接地引线以及接地电极9的引出线共同连接到多通道信号调理电路10的接地端子。原始电荷信号经过电荷转换、电压放大、低通滤波电路被调理成一定范围内的电压信号,随后通过模数转换电路将模拟信号转换成数字量输出,转换后的数字信号被发送到上位机中,并采用多传感器数据融合算法进行深度分析,从而实现区分正压力/横向切应力以及触觉/滑觉的功能。
使用本发明提供的方法制备得到的仿生纤毛结构的多信息柔性触觉传感器可对于正压力与横向切应力实现有效区分,同时可以进一步辨析物体的触觉与滑觉运动信息。在医疗健康检测、机器人触觉感知、仿生电子皮肤等领域有良好的应用前景。
- 一种仿生纤毛结构的多信息柔性触觉传感器及其制备方法
- 一种仿生纤毛结构的多信息柔性触觉传感器及其制备方法