金云母打磨装置
文献发布时间:2023-06-19 11:40:48
技术领域
本发明属于金云母后期处理设备技术领域,更具体的说涉及一种金云母打磨装置。
背景技术
金云母属于云母中的一种,是一种耐火绝缘材料,随着新能源电动车的高速发展,对电池的性能要求越来越高,也越来越受消费者的重视。
目前可采用金云母来包裹锂电池,用于防火、防腐蚀等,但在其包裹锂电池时,需要使金云母保持一定的形状来与锂电池进行匹配,目前的生产方式是通过冲压机等冲裁设备对金云母带或板进行冲裁弯折,使其形成具有一定形状的金云母产品,如图5所示,其具有一平面的主体,在主体的边缘具有若干连接脚和连接开口,在冲裁后会产生较多的毛边,不易与锂电池配合,也不符合产品质量要求,由于金云母质地较为柔软,不易固定,目前的做法是通过人工手持打磨机一点一点对金云母边缘打磨,不但需要经验丰富的师傅,而且效率较低,质量难以控制。
发明内容
针对现有技术的不足,本发明提供了一种可以实现自动化的对柔软的金云母进行快速打磨,提高生产效率的金云母打磨装置。
为实现上述目的,本发明提供了如下技术方案:一种金云母打磨装置,包括机架,机架上设置有打磨机构和定位机构,其中:
打磨机构,包括六关节工业机器人和打磨机,打磨机装于六关节工业机器人上,打磨机上设置有砂皮轮;
定位机构,包括夹持组件,夹持组件包括底板和侧板,底板水平布置,侧板由底板的侧面向上方延伸,所述底板与金云母的主体形状相适配,所述侧板与金云母的连接脚形状相适配,且所述底板和侧板内均开设有负压空腔,底板与侧板上均设置有连通负压空腔的吸气孔,所述负压空腔连接有负压管;
还包括如下打磨方法:
S1:将金云母水平放置于定位机构上,通过对负压空腔抽真空,使底板和侧板上的吸气孔将金云母的主体和侧板分别吸附在底板和侧板上;
S2:将砂皮轮固定在打磨机上,通过六关节工业机器人使打磨机移动至金云母处,启动打磨机,使砂皮轮接触金云母的边缘,六关节工业机器人使打磨机的砂皮轮沿着垂直于金云母边缘延伸方向来回移动进行打磨,在砂皮轮离开金云母边缘时六关节工业机器人使打磨机沿着金云母边缘延伸方向移动一个单位,一个单位的距离小于砂皮轮与金云母边缘接触时的宽度,直至金云母的边缘全部打磨完成。
进一步的所述底板上对应主体的连接开口处向内凹陷形成凹槽,凹槽上下贯穿底板。
进一步的所述定位机构还包括Y轴直线模组,夹持组件设置有Y轴直线模组上。
进一步的所述机架上还设置有保护罩,打磨机构位于保护罩内,所述保护罩的一侧设置有出入口,所述Y轴直线模组在保护罩内由出入口伸出至外侧。
进一步的所述机架上朝向定位机构处设置有吸尘器。
与现有技术相比,本发明的有益效果是:通过设置夹持组件,在夹持组件上具有底板和侧板,且底板和侧板上分别具有能够吸附金云母主体和连接脚的吸气孔,能够使金云母整体牢牢的吸附在夹持组件上,且在受到外力时不易变形或移动,在打磨过程中,砂皮轮的打磨方向与金云母体受到吸力的方向相同,可以避免金云母可以发生平移,保证打磨的顺利进行,本发明利用机械式自动化打磨金云母,可以大大提高生产效率,且结合本发明的打磨方法,保证产品质量。
附图说明
图1为本发明金云母打磨装置的立体结构图;
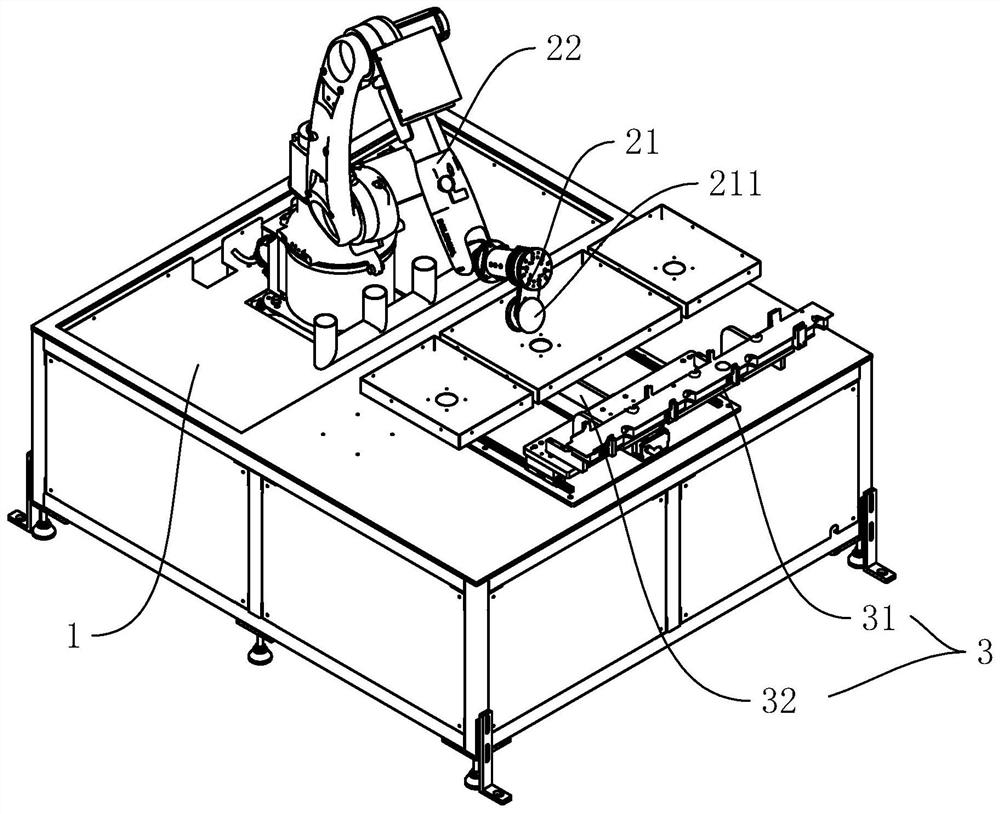
图2为本发明金云母打磨装置的立体结构图(无保护罩时);
图3为本发明中夹持组件将金云母吸附时的结构示意图;
图4为本发明中夹持组件的立体结构图;
图5为本发明中待打磨的金云母的立体结构图。
附图标记:1、机架;2、打磨机构;21、打磨机;211、砂皮轮;22、六关节工业机器人;3、定位机构;31、夹持组件;311、底板;3111、吸气孔;312、侧板;313、凹槽;32、Y轴直线模组;4、保护罩;6、金云母;61、主体;62、连接脚;63、连接开口。
具体实施方式
在本发明的描述中,需要说明的是,对于方位词,如有术语“中心”,“横向(X)”、“纵向(Y)”、“竖向(Z)”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示方位和位置关系为基于附图所示的方位或位置关系,仅是为了便于叙述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定方位构造和操作,不能理解为限制本发明的具体保护范围。
此外,如有术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含指明技术特征的数量。由此,限定有“第一”、“第二”特征可以明示或者隐含包括一个或者多个该特征,在本发明描述中,“数个”、“若干”的含义是两个或两个以上,除非另有明确具体的限定。
一种金云母打磨装置,包括机架1,机架1上设置有打磨机构2和定位机构3,其中:
打磨机构2,包括六关节工业机器人22和打磨机21,打磨机21装于六关节工业机器人22上,打磨机21上设置有砂皮轮211;
定位机构3,包括夹持组件31,夹持组件31包括底板311和侧板312,底板311水平布置,侧板312由底板311的侧面向上方延伸,所述底板311与金云母6的主体61形状相适配,所述侧板312与金云母6的连接脚62形状相适配,且所述底板311和侧板312内均开设有负压空腔,底板311与侧板312上均设置有连通负压空腔的吸气孔3111,所述负压空腔连接有负压管;
还包括如下打磨方法:
S1:将金云母6水平放置于定位机构3上,通过对负压空腔抽真空,使底板311和侧板312上的吸气孔3111将金云母6的主体61和侧板312分别吸附在底板311和侧板312上;
S2:将砂皮轮211固定在打磨机21上,通过六关节工业机器人22使打磨机21移动至金云母6处,启动打磨机21,使砂皮轮211接触金云母6的边缘,六关节工业机器人22使打磨机21的砂皮轮211沿着垂直于金云母6边缘延伸方向来回移动进行打磨,在砂皮轮211离开金云母6边缘时六关节工业机器人22使打磨机21沿着金云母6边缘延伸方向移动一个单位,一个单位的距离小于砂皮轮211与金云母6边缘接触时的宽度,直至金云母6的边缘全部打磨完成。
在本实施例中在打磨过程中砂皮轮211与金云母6接触处的切线不与金云母6的边缘延伸方向平行。
金云母6边缘延伸方向指的是金云母6边缘的长度方向。
本实施例中不但在底板311上设置吸气孔3111,而且在侧板312上也设置吸气孔3111,底板311上的吸气孔3111可以对金云母6的主体61进行牢牢的吸附,使主体61处于水平状态,而侧板312能够对金云母6的连接脚62进行吸附固定,使金云母6整体全部被吸附固定,在打磨主体61的边缘时,优选的砂皮轮211与主体61接触的边缘切线沿竖直方向,而在打磨连接脚62的边缘时,优选的沙皮轮与连接脚62的边缘切线沿水平方向。
本实施例优选的所述底板311上对应主体61的连接开口63处向内凹陷形成凹槽313,凹槽313上下贯穿底板311。
凹槽313可以方便砂皮轮211顺利的接触到连接开口63处的边缘并对其进行打磨。
本实施例优选的所述定位机构3还包括Y轴直线模组32,夹持组件31设置有Y轴直线模组32上。
进一步优选的所述机架1上还设置有保护罩4,打磨机构2位于保护罩4内,所述保护罩4的一侧设置有出入口,所述Y轴直线模组32在保护罩4内由出入口伸出至外侧。
本实施例优选的所述机架1内设置有吸尘器。
在打磨前,利用Y轴直线模组32使夹持组件31移动至保护罩4外侧,放好金云母6,然后再移动至保护罩4内侧进行打磨,打磨过程中利用吸尘器将产生的粉尘及时的吸走处理即可。
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 金云母打磨装置
- 金云母压制成型装置