一种四足机器人及智能货架
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及智能机器人技术领域,具体为一种四足机器人及智能货架。
背景技术
近年来,智能机器人发展越来越迅速,已经开始大规模运用到生产生活当中,从事着一些简单重复的工作,节约了许多人工成本,而随着智能机器人技术的不断加深,以后会运用到更多的领域,从事更复杂的工作。
货物运输机器人用于物流运输、仓库管理方面,可有效提高效率,但目前的货物运输机器功能单一,货物放置时与货架无配合,导致货物放置不稳定、位置不准确,同时货物放置不均衡容易导致货架侧翻,因此我们提出了一种四足机器人及智能货架来解决问题。
发明内容
为了克服物放置不稳定、位置不准确,同时货物放置不均衡容易导致货架侧翻的问题,本发明的目的在于提供一种四足机器人及智能货架,具有位置判断准确,货物放置稳定,调节货架平衡的作用。
本发明为实现技术目的采用如下技术方案:一种四足机器人,包括机身,所述机身的外侧设置四个关节模组,所述关节模组的外侧安装驱动模组,所述机身的正面固定连接固态激光雷达,所述机身的顶部固定连接双目摄像头,所述机身的顶部活动连接支撑转轴,所述支撑转轴的顶部固定连接激光雷达,所述支撑转轴的外侧固定连接深度摄像头,所述支撑转轴的外侧设置托举模组。
作为优化,所述固态激光雷达位于电机的侧面,所述双目摄像头位于支撑转轴的正面。
作为优化,所述驱动模组包括安装在关节模组内的大腿,所述大腿的下方活动连接小腿,所述大腿和小腿之间安装连接轴,所述小腿的底壁活动连接驱动轮。
作为优化,所述托举模组包括开设在支撑转轴外侧的置物架凹槽,所述置物架凹槽的内部转动连接置物架,所述置物架表面固定连接限位块。
一种智能货架,智能货架与权利要求书所述四足机器人电连接,包括底座,所述底座的顶部安装立柱,所述立柱的顶部固定连接警报装置,所述立柱的外侧固定连接货架摄像头,所述立柱的外侧安装货架转轴,所述货架转轴的内侧转动连接货物撑杆,所述货物撑杆的表面固定连接定位块,所述立柱与货架转轴之间设置防止立柱侧翻的平衡机构。
警报装置在智能货架被破坏或被随意移动的情况下启动警报;
定位块在货物撑杆放置货物时,防止货物掉落;
作为优化,所述平衡机构包括开设在立柱表面开设滑槽,所述滑槽的底壁开设活动槽,所述活动槽的底壁开设容纳槽,所述容纳槽的内部固定连接隔板,所述隔板的表面开设通孔,所述滑槽与活动槽内插接活动杆,所述活动杆的外侧套接压缩弹簧,所述活动杆的底部开设调节槽,所述调节槽的内部插接调节杆,所述调节杆的顶部设置调节弹簧。
作为优化,所述活动杆固定连接在货架转轴的底部,所述货架转轴与滑槽滑动连接。
作为优化,所述容纳槽的内部填充重液,且重液蔓延到活动槽内,所述隔板将容纳槽分隔成三个区间,且三个区间分别与三个活动槽相通,通孔将相邻的区间连通。
作为优化,所述调节杆底部设置密封盘,且与活动槽内壁紧密贴合,密封盘与重液液面保持距离,且间隔空间的容积与容纳槽单个区间容积相同。
一种四足机器人及智能货架使用方法:
四足机器人通过置物架运送货物,四足机器人运动时可以通过驱动轮轮式移动,也可以通过大腿、小腿行走移动;
当四足机器人移动到智能货架前时,货架摄像头扫描检测,若四足机器人不携带货物,智能货架不启动,若四足机器人携带货物,货架转轴控制货物撑杆转动至水平状态;
四足机器人继续移动,将置物架插入货物撑杆内,然后置物架转动收回置物架凹槽内,使货物落到货物撑杆上。
本发明具备以下有益效果:
1、该四足机器人及智能货架,通过四种机器人和智能货架的配合,工作时两者互相协助,使货物运输更加稳定、准确、安全,同时智能货架上摄像头对四足机器人进行运输判断,可以避免误触发。
2、该四足机器人及智能货架,通过在立柱内安装平衡机构,在货物撑杆上放置货物时,根据货物重量货物撑杆下滑一定距离,货架转轴带动活动杆和调节杆在活动槽内下移,此处活动槽内的重液被压到容纳槽内,同时其他两处活动槽内重液上升,如此放置货物处活动槽和对应容纳槽区间内重液减少,重量变轻,而其他两处重量变重,平衡货物重量,使其放置更加稳定,防止侧翻。
3、该四足机器人及智能货架,通过货物放置状态控制活动槽内重液液面的上升和下降,使立柱整体的重心变化,让有限的重液可调节的重量区间更大,无需使用更大的底座和更粗的立柱,使其安全性更好,成本更低,方便搬运。
附图说明
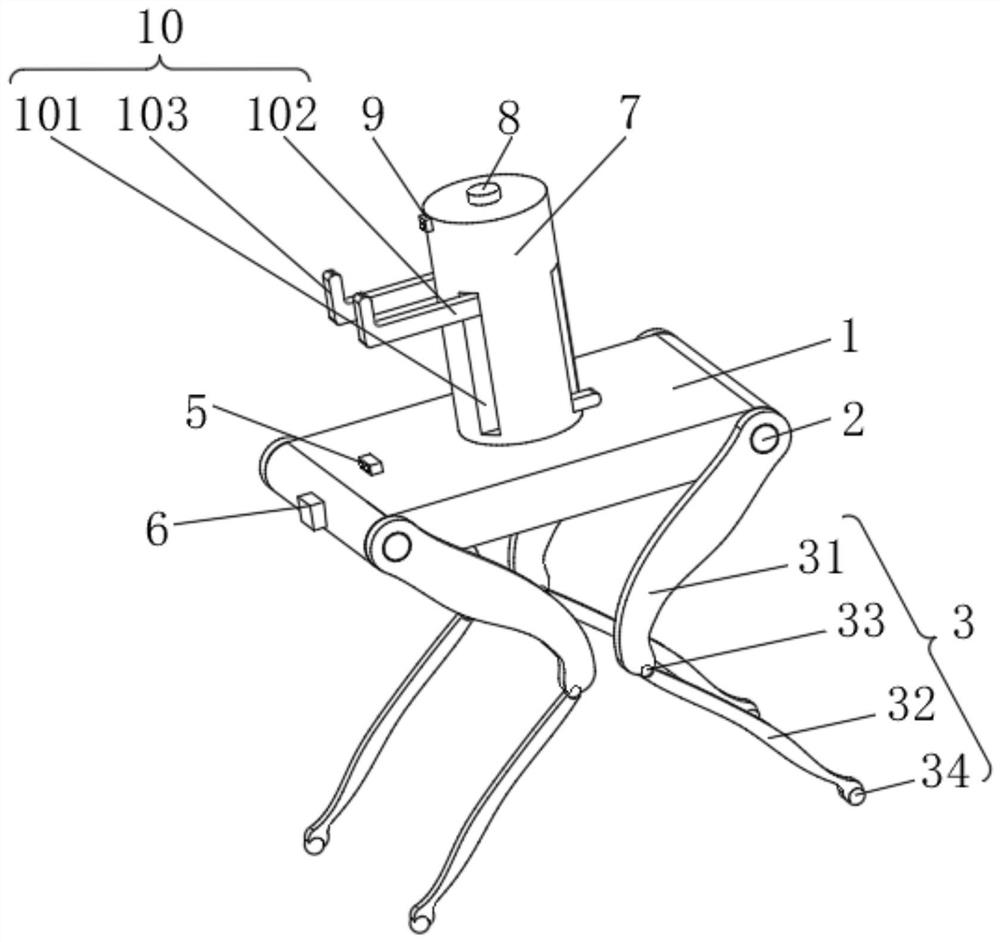
图1为本发明四足机器人示意图。
图2为本发明智能货架示意图。
图3为本发明智能货架活动槽内部示意图。
图4为本发明智能货架活动杆内部示意图。
图5为本发明智能货架容纳槽内部示意图。
图6为本发明四足机器人与智能货架对接示意图。
图中:1、机身;2、关节模组;3、驱动模组;31、大腿;32、小腿;33、连接轴;34、驱动轮;4、电机;5、双目摄像头;6、固态激光雷达;7、支撑转轴;8、激光雷达;9、深度摄像头;10、托举模组;101、置物架凹槽;102、置物架;103、限位块;11、底座;12、立柱;13、警报装置;14、货架摄像头;15、货架转轴;16、货物撑杆;17、定位块;18、平衡机构;181、滑槽;182、活动槽;183、容纳槽;184、隔板;185、通孔;186、活动杆;187、压缩弹簧;188、调节槽;189、调节杆;1810、调节弹簧。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
请参阅图1,一种四足机器人,包括机身1,机身1的外侧设置四个关节模组2,关节模组2的外侧安装驱动模组3,机身1的正面固定连接固态激光雷达6,机身1的顶部固定连接双目摄像头5,机身1的顶部活动连接支撑转轴7,支撑转轴7的顶部固定连接激光雷达8,支撑转轴7的外侧固定连接深度摄像头9,支撑转轴7的外侧设置托举模组10。
固态激光雷达6位于电机4的侧面,双目摄像头5位于支撑转轴7的正面,关节模组2内设置电机4。
驱动模组3包括安装在关节模组2内的大腿31,大腿31的下方活动连接小腿32,大腿31和小腿32之间安装连接轴33,小腿32的底壁活动连接驱动轮34。
托举模组10包括开设在支撑转轴7外侧的置物架凹槽101,置物架凹槽101的内部转动连接置物架102,置物架102和置物架凹槽101内壁之间安装电机4,置物架102表面固定连接限位块103。
实施例2
请参阅图2-5,一种智能货架,智能货架与权利要求书1四足机器人电连接,包括底座11,底座11的顶部安装立柱12,立柱12的顶部固定连接警报装置13,立柱12的外侧固定连接货架摄像头14,立柱12的外侧安装货架转轴15,货架转轴15外接电机4,货架转轴15的内侧转动连接货物撑杆16,货物撑杆16的表面固定连接定位块17,立柱12与货架转轴15之间设置防止立柱12侧翻的平衡机构18。
实施例3
请参阅图2-5,一种四足机器人,包括机身1,机身1的外侧设置四个关节模组2,关节模组2的外侧安装驱动模组3,机身1的正面固定连接固态激光雷达6,机身1的顶部固定连接双目摄像头5,机身1的顶部活动连接支撑转轴7,支撑转轴7的顶部固定连接激光雷达8,支撑转轴7的外侧固定连接深度摄像头9,支撑转轴7的外侧设置托举模组10。
固态激光雷达6位于电机4的侧面,双目摄像头5位于支撑转轴7的正面,关节模组2内设置电机4。
驱动模组3包括安装在关节模组2内的大腿31,大腿31的下方活动连接小腿32,大腿31和小腿32之间安装连接轴33,小腿32的底壁活动连接驱动轮34。
托举模组10包括开设在支撑转轴7外侧的置物架凹槽101,置物架凹槽101的内部转动连接置物架102,置物架102和置物架凹槽101内壁之间安装电机4,置物架102表面固定连接限位块103。
一种智能货架,智能货架与权利要求书1四足机器人电连接,包括底座11,底座11的顶部安装立柱12,立柱12的顶部固定连接警报装置13,立柱12的外侧固定连接货架摄像头14,立柱12的外侧安装货架转轴15,货架转轴15外接电机4,货架转轴15的内侧转动连接货物撑杆16,货物撑杆16的表面固定连接定位块17,立柱12与货架转轴15之间设置防止立柱12侧翻的平衡机构18。
警报装置13在智能货架被破坏或被随意移动的情况下启动警报;
定位块17在货物撑杆16放置货物时,防止货物掉落;
实施例4
请参阅图2-5,一种智能货架,平衡机构18包括开设在立柱12表面开设滑槽181,滑槽181的底壁开设活动槽182,活动槽182的底壁开设容纳槽183,容纳槽183的内部固定连接隔板184,隔板184的表面开设通孔185,滑槽181与活动槽182内插接活动杆186,活动杆186的外侧套接压缩弹簧187,活动杆186的底部开设调节槽188,调节槽188的内部插接调节杆189,调节杆189的顶部设置调节弹簧1810。
活动杆186固定连接在货架转轴15的底部,货架转轴15与滑槽181滑动连接。
容纳槽183的内部填充重液,且重液蔓延到活动槽182内,隔板184将容纳槽183分隔成三个区间,且三个区间分别与三个活动槽182相通,通孔185将相邻的区间连通。
调节杆189底部设置密封盘,且与活动槽182内壁紧密贴合,密封盘与重液液面保持距离,且间隔空间的容积与容纳槽183单个区间容积相同。
通过在立柱12内安装平衡机构18,在货物撑杆16上放置货物时,根据货物重量货物撑杆16下滑一定距离,货架转轴15带动活动杆186和调节杆189在活动槽182内下移,此处活动槽182内的重液被压到容纳槽183内,同时其他两处活动槽182内重液上升,如此放置货物处活动槽182和对应容纳槽183区间内重液减少,重量变轻,而其他两处重量变重,平衡货物重量,使其放置更加稳定;
同时液面的上升和下降使立柱12的重心变化,让有限的重液调节的重量区间更大,使其安全性更好。
活动槽182内压力变化时,调节杆189在调节槽188内活动继续调节。
实施例5
请参阅图1-6,一种四足机器人,包括机身1,机身1的外侧设置四个关节模组2,关节模组2的外侧安装驱动模组3,机身1的正面固定连接固态激光雷达6,机身1的顶部固定连接双目摄像头5,机身1的顶部活动连接支撑转轴7,支撑转轴7的顶部固定连接激光雷达8,支撑转轴7的外侧固定连接深度摄像头9,支撑转轴7的外侧设置托举模组10。
固态激光雷达6位于电机4的侧面,双目摄像头5位于支撑转轴7的正面,关节模组2内设置电机4。
驱动模组3包括安装在关节模组2内的大腿31,大腿31的下方活动连接小腿32,大腿31和小腿32之间安装连接轴33,小腿32的底壁活动连接驱动轮34。
托举模组10包括开设在支撑转轴7外侧的置物架凹槽101,置物架凹槽101的内部转动连接置物架102,置物架102和置物架凹槽101内壁之间安装电机4,置物架102表面固定连接限位块103。
一种智能货架,智能货架与权利要求书1四足机器人电连接,包括底座11,底座11的顶部安装立柱12,立柱12的顶部固定连接警报装置13,立柱12的外侧固定连接货架摄像头14,立柱12的外侧安装货架转轴15,货架转轴15外接电机4,货架转轴15的内侧转动连接货物撑杆16,货物撑杆16的表面固定连接定位块17,立柱12与货架转轴15之间设置防止立柱12侧翻的平衡机构18。
警报装置13在智能货架被破坏或被随意移动的情况下启动警报;
定位块17在货物撑杆16放置货物时,防止货物掉落;
平衡机构18包括开设在立柱12表面开设滑槽181,滑槽181的底壁开设活动槽182,活动槽182的底壁开设容纳槽183,容纳槽183的内部固定连接隔板184,隔板184的表面开设通孔185,滑槽181与活动槽182内插接活动杆186,活动杆186的外侧套接压缩弹簧187,活动杆186的底部开设调节槽188,调节槽188的内部插接调节杆189,调节杆189的顶部设置调节弹簧1810。
活动杆186固定连接在货架转轴15的底部,货架转轴15与滑槽181滑动连接。
容纳槽183的内部填充重液,且重液蔓延到活动槽182内,隔板184将容纳槽183分隔成三个区间,且三个区间分别与三个活动槽182相通,通孔185将相邻的区间连通。
调节杆189底部设置密封盘,且与活动槽182内壁紧密贴合,密封盘与重液液面保持距离,且间隔空间的容积与容纳槽183单个区间容积相同。
一种四足机器人及智能货架使用方法:
四足机器人通过置物架102运送货物,四足机器人运动时可以通过驱动轮34轮式移动,也可以通过大腿31、小腿32行走移动;
当四足机器人移动到智能货架前时,货架摄像头14扫描检测,若四足机器人不携带货物,智能货架不启动,若四足机器人携带货物,货架转轴15控制货物撑杆16转动至水平状态;
四足机器人继续移动,将置物架102插入货物撑杆16内,然后置物架102转动收回置物架凹槽101内,使货物落到货物撑杆16上。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。