一种基于灰狼算法的数控机床几何误差辨识方法
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及数控机床精度检测领域,特别涉及一种基于灰狼算法的数控机床几何误差辨识方法。
技术背景
多轴数控机床在航空航天、医疗、汽车等行业领域对国家经济发展产生着重大影响。然而,我国的数控机床设计、制造及装配水平较国外发达国家仍存在较大差距,导致国产数控机床普遍精度不高,因此近年来的研究热点主要在提高数控机床精度方面。随着现代工业的发展,各行业对数控机床的精度要求越来越高,目前提高数控机床精度主要有两种方法,一种是在机床制造前通过设计减小误差,另一种是机床制造后通过各种方法测量误差并进行补偿的误差补偿技术。前一种方法有局限性且达到的效果不理想,相比较后一种方法,达到同样的机床精度所需的经济花费较高。相对的误差补偿技术作为一种实用的提高数控机床精度的技术被广泛应用,因此高效、精确的几何误差辨识方法就显得尤为关键。
经过国内外研究人员的深入研究,针对几何误差元素的建模取得了较为显著的成果,但是常规的几何误差项参数化建模较多采用激光干涉仪作为测量仪器,存在几何误差样本信息少,需要采用激光干涉仪的辨识结果进行几何误差项参数化建模,识别过程繁琐且易导致误差信息不足,造成参数化建模精度低的缺点,无法得到预期的建模效果,因此发明一个更准确、更简单高效的机床几何误差辨识方法十分重要。
发明内容
本发明的目的在于提出一种基于灰狼算法的数控机床几何误差辨识方法,利用切比雪夫多项式对几何误差进行参数化建模,将灰狼算法应用于数控机床的误差辨识中,并基于灰狼算法优化了切比雪夫多项式的回归系数。本发明的辨识方法仅需球杆仪的测量数据,降低了数控机床几何误差项辨识的难度。
一种基于灰狼算法的数控机床几何误差辨识方法,包括如下步骤:
步骤1、对于三轴数控机床来说,其具有三个线性轴。依据机床的拓扑结构,对与位置相关的几何误差(Position-Dependent Geometric Errors,PDGEs)建立基于切比雪夫多项式的参数化模型。
步骤2、通过球杆仪测量三轴数控机床的误差数据。
步骤3、利用灰狼算法对切比雪夫多项式的回归系数进行优化,得到几何误差项数学模型,完成对数控机床几何误差的辨识。
步骤1中对于三轴数控机床来说,其具有三个线性轴。依据机床的拓扑结构,对PDGEs建立基于切比雪夫多项式的参数化模型。包括步骤:
步骤1.1、首先,建立理想状态下的几何误差模型,当X,Y,Z轴分别移动x,y,z时它们的齐次变换矩阵为:
工件坐标系W到刀具坐标系T的齐次坐标变换矩阵为:
步骤1.2、进一步基于齐次变换矩阵建立实际误差模型。在实际状态下,每个直线轴都有6项与位置相关的几何误差,分别为1项定位误差,2项直线度误差,3项角度误差。以X轴为例,这些误差分别为δ
当X,Y,Z轴移动量为x,y,z时,则它们的实际变换矩阵可以表示为:
在实际状态下,工件坐标系W到刀具坐标系T的齐次坐标变换矩阵为:
对于X、Y、Z轴联动忽略二次及以上的高阶项误差,经化简几何误差模型在X、Y、Z三个方向上的分量为:
步骤1.3、切比雪夫多项式是以递归方式定义的正交多项式,定义在[-1,1]内,其递推关系如公式(1)所示:
与位置相关的几何误差元素可以拟合为与位置有关的多项式函数,如下公式(2)所示:
由于切比雪夫多项式是定义在[-1,1]内,故应将球杆仪的测量行程与切比雪夫多项式归一化,得:
其中
根据公式(1),可得前4项切比雪夫多项式可以表示为:
以X轴为例,分别对6项与位置相关的几何误差进行多项式预拟合,以x、y、z表示绝对位置与初始点的相对距离,如下所示:
经化简得:
进一步地,步骤2中通过球杆仪测量三轴数控机床的误差数据,包括步骤:
步骤2.1、首先,由于加工运动的主要区域通常位于导轨的中心区域,且受运动轴行程所限,因此,选择运动轴中间区域作为误差测量实验的范围,球杆仪的标称长度为100mm。然后,将球杆仪的基座安装在测量区域中间位置,球杆仪的另一端安装在刀具端,并置于X轴负方向位置上,此时球杆仪刀具端的坐标为(-100,0,0)。最后,让球杆仪刀具端从(-100,0,0)位置移动至(0,0,100)位置。其中Y轴向正半轴运动,运动轨迹为半球面上一条空间曲线。
步骤2.2、机床的刀位点应满足关系式:
X
为将球面路径均匀划分,需建立一个新的坐标系,轨迹为一个半径为
轨迹点从坐标系O′-X′Y′中转换到原坐标系O-XYZ中的坐标,其坐标变换矩阵为:
首先绕Y轴旋转45°,再向X轴负半轴移动50mm,再向Z轴负半轴移动50mm。从而得到坐标系O-XYZ中的轨迹点的坐标。
步骤2.3、在球杆仪半球面内测量中,得到的是其径向的杆长变化量Δr,Δr在X、Y、Z轴上的分量即为ΔX、ΔY、ΔZ,如下公式(4)所示:
公式(4)中,
进一步地,步骤3中利用灰狼算法对切比雪夫多项式的回归系数进行优化,得到几何误差项数学模型,完成对数控机床几何误差的辨识。包括步骤:
步骤3.1、基于误差测量实验得到的球杆仪误差数据,确定Wolf算法中灰狼个体的数目及取值范围。随机生成规模为10的初始狼群,X
步骤3.2、建立Wolf算法的目标函数,通过使离散的误差数据与灰狼算法候选解间的残差平方和最小化,求切比雪夫多项式系数,表示为fitness。这里将其残差平方和的倒数作为适应度的大小,以表示适应度最大的灰狼个体为最优解。在步骤2.3中根据球杆仪得到的在三个方向上的误差分量,基于此,构建灰狼算法的适应度函数如下公式(5)所示:
公式(5)中,m=18,r=33,p=42,fitness代表一个灰狼个体的适应度大小。i代表第i个灰狼个体,n=42。ΔX
步骤3.3、保存最优灰狼个体α,β,δ:通过目标函数值找到适应度最高的三个灰狼个体,并将其分别保存为α,β,δ。
步骤3.4、根据灰狼算法的数学表述,更新灰狼种群的位置。
步骤3.5、更新参数a,A,C。
步骤3.6、判断是否满足终止条件,若是则停止并输出α作为所需最优化问题的最优解,若否则转向步骤3.2。
步骤3.7、利用步骤3.6中结果,再结合步骤1中三轴数控机床几何误差项参数化建模方法可得,X,Y,Z轴的各项几何误差数学模型为:
本发明利用切比雪夫多项式对几何误差进行参数化建模,将灰狼算法应用于数控机床的误差辨识中。通过球杆仪测量实验有效的建立了几何误差参数化预测模型。将灰狼算法应用于数控机床的误差辨识中,并基于灰狼算法优化了切比雪夫多项式的回归系数。在一定程度上降低了几何误差参数化建模的难度,为机床的误差辨识提供了新方法。
附图说明
图1为某三轴数控机床结构示意图。
图2为该三轴机床的运动链图。
图3为本发明方法实施例中刀具运行轨迹图。
图4为本发明方法实施例中杆长变化量在轴上分量简化图。
图5为本发明方法实施例中灰狼算法流程图。
图6为本发明方法实施例中主要技术参数图。
图7为本发明方法实施例中灰狼算法收敛曲线图。
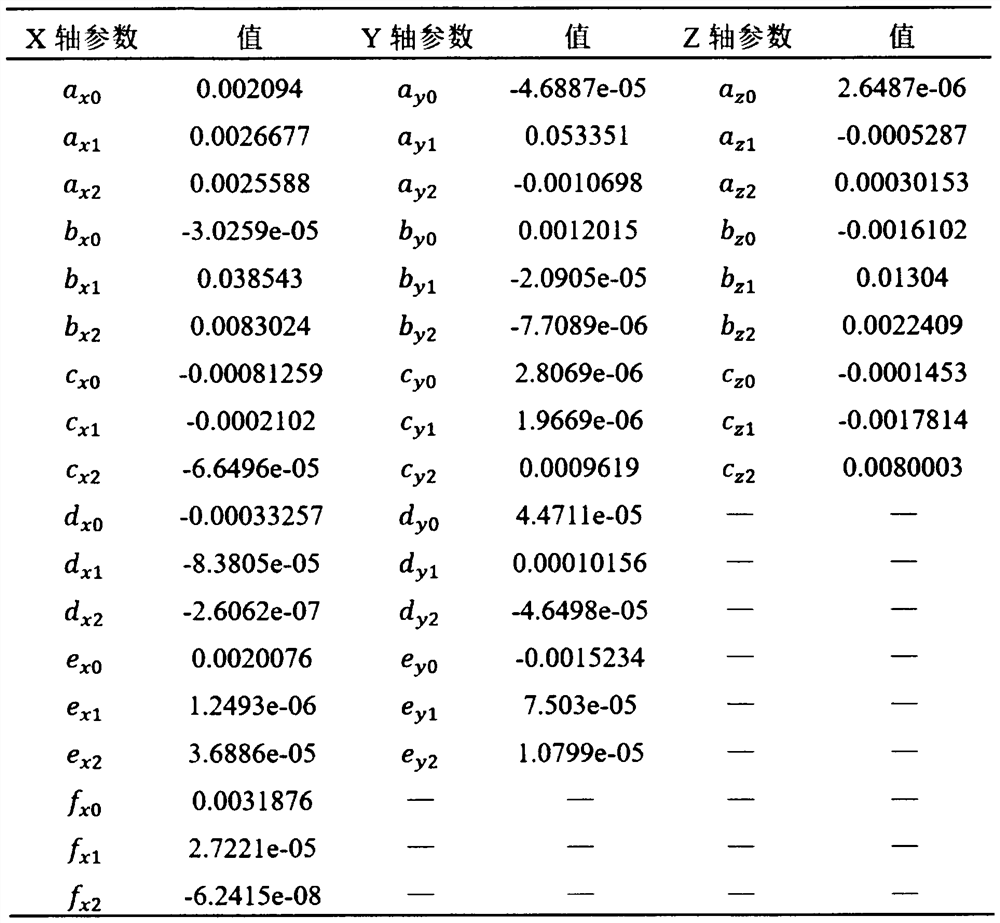
图8为本发明方法实施例中基于灰狼算法得到的切比雪夫多项式回归系数图。
图9为本发明方法实施例中X、Y、和Z轴的各误差项数学模型曲线图。
具体实施方式
下面结合附图和具体实施例对本发明作进一步说明。
附图1所示为某种三轴数控机床结构示意图,以该三轴数控机床为例,对本发明方法进阐述。
步骤1中对于三轴数控机床来说,其具有三个线性轴。依据机床的拓扑结构,对PDGEs建立基于切比雪夫多项式的参数化模型。包括步骤:
步骤1.1、根据图2机床的运动链,在理想状态下,X,Y,Z轴的齐次变换矩阵为:
工件坐标系W到刀具坐标系T的齐次坐标变换矩阵为:
步骤1.2、进一步基于齐次变换矩阵建立实际误差模型。X,Y,Z轴的实际变换矩阵为:
几何误差模型在X、Y、Z三个方向上的分量为:
步骤1.3、切比雪夫多项式递推关系为公式(1)所示:
与位置相关的几何误差元素可以拟合为与位置有关的多项式函数,如下公式(2)所示:
由于切比雪夫多项式是定义在[-1,1]内,故应将球杆仪的测量行程转化到切比雪夫的定义域内,得:
其中
前4项切比雪夫多项式可以表示为:
在忽略高阶误差项,X、Y、Z轴联动时仅有14项几何误差影响机床的加工精度,以x、y、z表示绝对位置与初始点的相对距离,如下式所示:
进一步地,步骤2中通过球杆仪测量三轴数控机床的误差数据,包括步骤:
步骤2.1、首先,选择运动轴中间区域作为误差测量实验的范围,球杆仪的标称长度为100mm。然后,将球杆仪的基座安装在测量区域中间位置,球杆仪的另一端安装在刀具端,并置于X轴负方向100mm位置上。最后,让球杆仪的刀具端走过半球面上一条空间曲线这样的运动轨迹,如图3所示,该轨迹以X轴正半轴为起始点,机床X轴从100mm移动至0mm,Z轴由0mm移动至100mm,其中Y轴向正半轴运动。
步骤2.2、轨迹点从坐标系O′-X′Y′中转换到原坐标系O-XYZ中的坐标,其坐标变换矩阵为:
步骤2.3、在球杆仪半球面内测量中,如图4所示,得到的是其径向的杆长变化量Δr,Δr在X、Y、Z轴上的分量即为ΔX、ΔY、ΔZ,如下公式(4)所示:
公式(4)中,
进一步地,步骤3中利用灰狼算法对切比雪夫多项式的回归系数进行优化,得到几何误差项数学模型,完成对数控机床几何误差的辨识。具体算法流程图如图5,包括步骤:
步骤3.1、基于误差测量实验得到的球杆仪误差数据,确定Wolf算法中灰狼个体的数目及取值范围。随机生成规模为10的初始狼群,X
步骤3.2、建立灰狼算法的目标函数,其主要参数如图6,输入参数进行迭代得到最优的α狼,在步骤2.3中根据球杆仪得到的在三个方向上的误差分量,基于此,构建灰狼算法的适应度函数如下公式(5)所示:
步骤3.3、保存最优灰狼个体α,β,δ:通过目标函数值找到适应度最高的三个灰狼个体,并将其分别保存为α,β,δ。
步骤3.4、根据灰狼算法的数学表述,更新灰狼种群的位置。
步骤3.5、更新参数a,A,C。
步骤3.6、判断是否满足终止条件,若是则停止并输出α作为所需最优化问题的最优解,其收敛曲线见图7,可知灰狼算法在410次左右开始收敛,从灰狼算法优化出最佳适应度函数的灰狼个体,其结果见图8。
步骤3.7、利用步骤3.6中结果,可以实现X轴、Y轴、Z轴的误差预测。由步骤1中三轴数控机床几何误差项参数化建模方法可得,X轴的各项几何误差数学模型为:
Y轴的各项几何误差数学模型为:
Z轴的各项几何误差数学模型为:
根据参数方程,得到图9所示X、Y、和Z轴的各误差项数学模型曲线。
本发明最后得到机床几何误差的参数化数学模型。附图只是一个优选实例,上述的实施例只是为了描述本发明,并不用以限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应涵盖在本发明的保护范围之内。