用于确定激光雷达传感器的最大作用范围的方法以及设备
文献发布时间:2023-06-19 19:37:02
技术领域
本发明涉及一种用于确定激光雷达传感器的最大作用范围的方法,所述方法包括借助激光雷达传感器提供激光雷达点云的步骤,其中,所述激光雷达点云三维地映射在确定的时刻在激光雷达传感器的预确定的视场内激光雷达传感器的环境。
此外,本发明涉及一种相应的设备。
背景技术
使用激光雷达系统(缩写“LiDAR”代表“Light Detection and Ranging(光探测和测距)”或者“Light imaging,detection and ranging(光成像、探测和测距)”,德语:“Lichterkennung und Reichweitenmessung(光识别和作用范围测量)”)的方法是与雷达有关的方法,该方法用于光学间距测量和速度测量以及用于大气参数的远程测量。这种类型的系统和方法涉及三维激光扫描的形式。通常,术语“LiDAR”也包括一系列使用激光以用于测量与确定的目标的距离的技术。
这样的激光雷达系统在广泛的实际应用中使用,所述实际应用需要无接触的距离测量。通过使用适合的光学采样元件或者通过对目标的确定的区域进行照亮/闪光,可以获得具有该目标的深度信息和反向散射特性的3D图像。这样的系统提供3D点云或3D点云帧,该3D点云帧可以借助软件来处理,以便获得关于环境的附加信息。
因此,3D激光雷达成像提供用于在车辆、尤其是机动车中的不同应用的有吸引力的可能性,在所述车辆中使用激光雷达系统例如用于避免危险和碰撞。在现有技术中,激光雷达系统现在尤其在自主驾驶(在英语里也被称为Autonomous Driving,AD)领域中以及在先进驾驶辅助系统中使用,所述先进驾驶辅助系统在英语里也被称为ADAS(AdvancedDriving Assistance Systems)。
在此,必须对所获得的数据——基于3D点云——再进行(进一步)处理,以便对环境对象进行识别、区分和分类,所述环境对象例如是车辆、行人、建筑物、道路表面或者别的障碍物。如果需要作出用于避免危险和自转向的决定,则这种类型的分类对于自主的且驾驶员支持的导航以及驾驶辅助而言具有最高相关性。为此目的,已提出用于对象识别和对象测绘的不同的技术和方法,所述技术和方法不仅适合用于陆地应用、还适合用于空中发射的应用。
在US8244026B2、US2016/0154999A1以及US9360554B2中公开相应的解决方案。另外的解决方案可在不同学术文章中找到,例如在:Matei等人的《Rapid and scalable 3Dobject recognition using LiDAR data》(Proc.SPIE6234,Automatic TargetRecognition XVI,623401(2006))中或者在Himmelsbach等人的《LiDAR-based 3D objectperception》(Proceedings of 1st International Workshop on Cognition forTechnical Systems(2008))中。
主要在那里提出的技术使用3D信息来确定在经照亮的场景中不同对象的几何形状和棱边,以便区分不同类型的目标。然而,仅基于纯粹几何形状的和维度的特性的对象识别是困难的,尤其是当激光雷达传感器的或摄像机的分辨率不是非常高时并且当不同类型的目标具有相似的几何形状时。除了3D测绘之外,激光雷达传感器还提供关于经照亮的目标的反射特性的信息,其方式是,所述激光雷达传感器测量经反射的/经反向散射的光的强度。这种类型的解决方案例如在US9360554B2中提到。
因此,这些信息可以用于用于对象识别的附加的支持并且进一步改进对目标的区分和分类,例如也在如下学术文章中所阐明的那样:Takagi等,《Road EnvironmentRecognition Using On-vehicle LiDAR》,Intelligent Vehicles Symposium(2006)。除此之外,还可能的是,测量目标的速度,其方式是,测量在不同时刻的距离。
然而,为了估计和量化激光雷达传感器或系统的当前最大作用范围、即以米为单位的最大距离,在该最大距离内借助激光雷达传感器仍可以可靠地识别环境对象,目前在现有技术中还没有令人满意的解决方案。尤其是,在现有技术中目前不存在令人信服的解决方案,所述解决方案可以与特定的环境场景无关地实现对激光雷达传感器的最大作用范围的可靠确定。
然而,特别是对于在车辆(机动车)中的应用,这样的作用范围确定能够提供重要信息。因此,如果车辆在具有许多遮挡物和因建筑物等而受限的场景的城市地区中驾驶,则激光雷达传感器的最大作用范围(例如,300m)也应该是能够确定的。换言之,对在激光雷达系统中使用的激光雷达传感器的最大作用范围的估计是重要的关键参量,该关键参量应该是能够与激光雷达系统的当前的几何形状场景无关地识别的。
发明内容
根据本发明,提供一种用于确定激光雷达传感器的最大作用范围的方法,所述方法包括下述步骤:借助激光雷达传感器提供激光雷达点云,该激光雷达点云三维地映射在确定的时刻在该激光雷达传感器的预确定的视场内该激光雷达传感器的环境。辨认该激光雷达点云内的至少两个不同的点集,所述点集映射所述环境中的各一个面积,所述面积是分别被识别为配属于预定义的环境对象的。对分别通过所述点集来映射的那些面积进行计算,并且将映射所述面积的激光雷达点的数量除以分别相应被映射的面积,以便获得至少两个不同的点密度。由所述至少两个点密度计算商,使用所述商来求取所述激光雷达传感器的最大作用范围,为此使用事先保存的回归曲线。
这种类型的方法提供如下优点:即使在“不清晰的能见度”的情况下,即例如在使用映射有雾的环境的3D激光雷达点云的情况下,该方法也可靠地、稳定地且有效率地实现对激光雷达传感器的最大作用范围的识别。
优选地,预定义的环境对象是在激光雷达传感器的环境和视场中的如下对象:所述对象能够识别为借助激光雷达传感器检测的环境的一部分。尤其优选地,预定义的环境对象是在激光雷达传感器的环境和视场中的如下对象:所述对象在激光雷达传感器的环境和视场中的出现可以被认为是始终存在的,例如土地的或者地面的表面,所述激光雷达传感器在该表面上或者该表面上方运动。优选地,对多个面积或一个面积进行计算,其方式是,将位于点集的外围或边缘上的点(想像中地)直线地相互连接成周缘线并且计算被该周缘线包围的面积。
根据一种优选的实施方式,通过应用于激光雷达点云的分类算法不仅确定或者识别预定义的环境对象的存在、还确定或者识别该预定义的环境对象在所述视场中的位置。在一种这种类型的实施方式中,对特定的环境对象的识别或分类可以快速地、安全地且可靠地通过恰好设置用于该目的的算法来实现。优选地,在对特定的环境对象的识别或分类方面训练和/或已训练该分类算法,尤其是在使用神经网络的情况下。
优选地,所述分类算法是如下算法:借助所述算法能够将土地的和/或地面的表面识别为在该激光雷达传感器的视场中的环境内的预定义的环境对象,所述激光雷达传感器在所述时刻位于所述土地和/或所述地面上或者上方。换言之,所述分类算法优选是如下算法:该算法将地面的或者土地的表面识别为预定义的环境对象,激光雷达传感器在该地面或者土地上运动,该激光雷达传感器例如作为安装在机动车中的激光雷达系统的一部分。在该实施方式的一种优选的拓展方案中,为了改进对地面点或土地点本身的识别/配属,还将另外的算法应用于先前被识别为这样的点的点(即应用于如下激光雷达点:所述激光雷达点已被识别为配属于地面或土地的表面),借助该另外的算法执行对3D激光雷达点云的映射土地或地面的那些点的密度的分析。在英语里,这样的(另外的)算法有时也被称为“Density of Ground Points(地面点密度,DGP)”算法。在德语里,这样的(另外的)算法有时也被称为“
优选地,至少两个不同的点集映射如下面积:所述面积分别表示土地的和/或地面的表面的至少一部分,所述激光雷达传感器在该时刻位于该土地和/或地面上或者该土地和/或地面上方。优选地,在辨认至少两个不同的点集的步骤之前,实施为地面估计算法的分类算法将激光雷达点云中的所有点识别为“地面”或“土地”,其在视场中的借助激光雷达传感器采样的环境内示出或映射地面平面或土地平面。
优选地,所述面积在该视场中可以很靠近激光雷达传感器或者也可以远离该激光雷达传感器。如果存在对能见度条件的损害,例如通常通过激光器功率的降低或者通过不利的天气条件所导致的那样,位于激光雷达传感器附近的激光雷达点子类或激光雷达子集往往具有较小的密度。相反,如果不存在损害,则该密度往往较高。为了相对于发生变化的表面条件具有稳健性,确定为两个区域或为两个面积计算的密度之间的商。优选地,所述至少两个面积是基本上平坦的面积。
优选地,在使用该商的框架中,将该商与为通过至少两个不同的点集所映射的面积或者为与这些面积基本上可比的面积而事先保存的至少一个回归曲线进行比对。通过为所述面积或者为所述可比的面积保存至少一个回归曲线,可以简单且快速地由所述商推断出激光雷达传感器的最大作用范围。
在一种优选的实施方式中,事先保存的至少一个回归曲线使计算出的商与该激光雷达传感器的最大作用范围关联起来。此外优选地,计算出的商直接与激光雷达传感器的最大作用范围成比例。在一种这种类型的实施方案中,最大作用范围可以快速地、简单地且直接地借助商从回归曲线读出或者推导出。优选地,已由事先为所述面积和/或为所述可比的面积检测的数据求取该回归曲线。优选地,已将事先检测到的数据提供给神经网络,该神经网络将不同的最大作用范围配属于相应涉及的和/或可比的面积的不同商。
优选地,回归曲线是2至3度的多项式,对于该多项式,必须从经标记的或经标示的数据中学习或学会系数。用于学习(学会)系数的一种优选的可能性是使用所谓的SVR(Support Vector Regression,支持向量回归),SVR在德语里也被称为Support-Vektor-Regression或者Unterstützungsvektorregression。基于该SVR的SVR学习算法从不同的地面区段和目标中获得该商作为输入,以便输出如下区域:该区域包含在用于确定的激光雷达图像的“地面实况”(在英语里,该地面实况常常也被称为“Ground Truth”)中,其中,该激光雷达图像从激光雷达点云中得出。
优选地,所述至少两个不同的点集在至少一个激光雷达点方面、尤其是在所有激光雷达点方面彼此不同。即,优选地,第一点集中的激光雷达点中的激光雷达点都不位于第二点集中,反之亦然。映射所述面积的激光雷达点集彼此之间的区别越多,根据本发明的方法相对于地面的或土地的发生变化的表面条件的稳健性越高。如果例如由于雾而降低了至少两个面积中的一个面积的点密度,则下述情况的概率降低:伴随着所述至少两个面积之间的距离的增加,相同的雾也降低了至少两个面积中的另一个面积的点密度。因此,通过形成该商,根据本发明的方法相对于干扰影响变得更稳健且更可靠,所述干扰影响使激光雷达传感器的能见度劣化。
优选地,预确定的视场是激光雷达传感器的预确定的至少两个子视场中的一个,所述预确定的至少两个子视场共同形成所述激光雷达传感器的总视场。这种类型的子视场在英语里有时也被称为所谓的“Fields of View”(FoV)。优选地,为每个子视场执行根据本发明的方法,并且为每个子视场确定最大作用范围。即,在一种这种类型的实施方案中,可以更准确地、即更细粒度地分类整理用于各个子视场的最大作用范围。通过这种方式,可以更好地利用且更准确地使用激光雷达传感器。
在该实施方式的一种优选的拓展方案中,根据预确定的规则由为所述子视场求取的最大作用范围求取用于所述总视场的最大作用范围。在一种这种类型的实施方案中,可以更准确地确定用于所述总视场的最大作用范围。所述预确定的规则例如可以是算术平均。
此外,根据本发明,提供一种具有激光雷达传感器的设备,其中,该设备设置用于,实施根据本发明的方法的步骤。在一种这种类型的实施方案中,根据本发明的设备具有针对根据本发明的方法所提到的优点。
优选地,该设备此外包括存储器以及计算单元,该计算单元设置用于在使用存储器的情况下实施该方法。
优选地,视场指的是激光雷达传感器的整个检测场或者激光雷达传感器的整个检测场的一部分。
此外优选地,激光雷达点云指的是地理参考的点云,该地理参考的点云包括多个激光雷达测量点,所述激光雷达测量点由激光雷达光在环境对象上的反向散射或反射得出。
本发明的有利的扩展方案在说明书中描述。
附图说明
根据附图和下面的描述更详细地阐述本发明的实施例。附图示出:
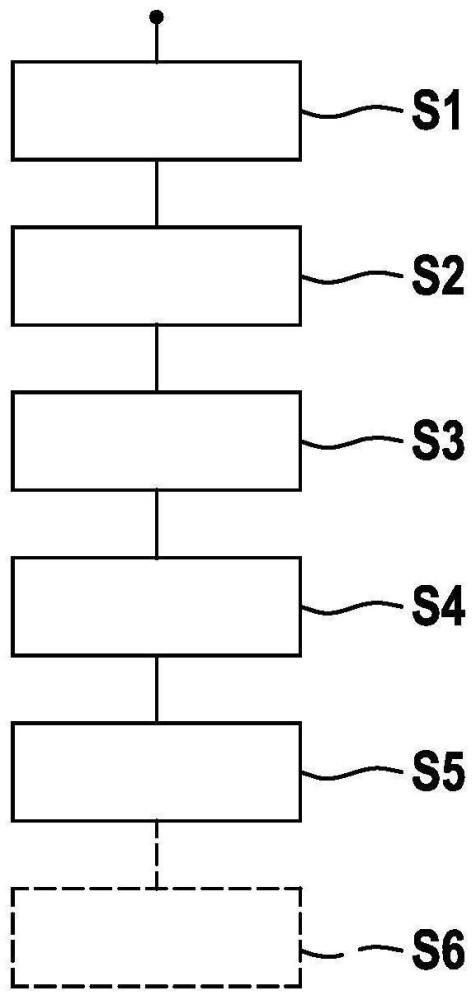
图1示出根据本发明的方法的实施例的流程图,
图2示出激光雷达传感器的示例性视场,该激光雷达传感器安装在机动车中。
具体实施方式
在图1中示出根据本发明的用于确定激光雷达传感器的最大作用范围的方法的实施例的流程图。该方法的各个步骤在方框中示出,其中,纯粹可选的步骤在用虚线画出的方框中示出。该方法的步骤的顺序可以在别的实施例中与图1中所示的顺序不同。
在该实施例中,在第一方法步骤S1中借助激光雷达传感器提供激光雷达点云。该激光雷达传感器可以例如安装在机动车中并且可以尤其例如同样在用于自主驾驶的应用的框架中使用。但是,在别的实施例中,该激光雷达传感器也可以在别的应用的框架中使用。在第一方法步骤S1中借助激光雷达传感器提供的激光雷达点云三维地映射在确定的时刻在激光雷达传感器的预确定的视场内激光雷达传感器的环境。因此,各个激光雷达点示出地理参考点。
在当前实施例的框架中,第一方法步骤S1——正如根据本发明的方法的实施例的进一步在下文更详细地描述的其余步骤那样——准连续地实施。即,在该实施例中,准连续地确定用于激光雷达传感器的视场的最大作用范围。但是,在别的根据本发明的实施例中,对最大作用范围的确定并且因此对根据本发明的方法的方法步骤的实施也可以总是仅以预确定的时间间距(例如每毫秒一次)仅在出现预确定的条件的情况下或者但是根据完全不同的预确定的规则进行。
在第二方法步骤S2中,辨认激光雷达点云内的两个不同的点集,所述点集映射环境中的各一个面积,所述面积是分别被识别为配属于预定义的环境对象的。在该实施例中,该第二方法步骤S2首先还以如下另外的方法步骤为前提:在该另外的方法步骤中,识别映射该预定义的环境对象的所有点本身并且通过这种方式分类预定义的环境对象本身。然而,该步骤是纯粹可选的并且在该方法的别的根据本发明的实施例也可以是省去的或可以被省去(出于该原因,该步骤在图1中未画出)。
在该实施例中,在面积辨认的框架中,纯粹示例性地,通过应用于激光雷达点云的分类算法不仅确定预定义的环境对象的存在、还确定其在视场中的位置,该分类算法在该实施例中纯粹示例性地是如下算法:借助该算法能够将土地的和/或地面的表面识别为在激光雷达传感器的视场中的环境内的预定义的环境对象,该激光雷达传感器在该时刻位于该土地和/或该地面上或者该土地和/或该地面上方。即,在该实施例中,在激光雷达传感器的视场中的环境内的预定义的环境对象纯粹示例性地是土地的或地面的表面,该表面位于激光雷达传感器的视场中由该激光雷达传感器检测。通常,该表面将是几乎平面的表面,例如道路的、车道的、路径的或者其他驾驶地基的表面。但是,也可以实施具有别的预定义的环境对象和别的分类算法的别的根据本发明的方法。
在该实施例中,两个不同的点集映射如下面积:所述面积分别表示土地的或者地面的表面的一部分,激光雷达传感器在该时刻位于该土地或者地面上或者该土地或者地面上方。在该实施例中,所述面积从激光雷达传感器的视场的如下区域中选择:通常在该区域中存在或者在该区域中能够期待预定义的环境对象、即土地的或者地面的表面。在该实施例中,所述面积还从该视场的如下区域中选择:对于该区域,已经保存大量经验值作为数据组。这进一步在下面中更详细地阐述。
在第三方法步骤S3中,对分别通过点集来映射的那些面积进行计算,并且将映射这些面积的激光雷达点的数量除以分别相应被映射的面积,以便获得至少两个不同的点密度。即,在该实施例中,将位于经辨认的点集/面积的外边缘上的点直线地相互连接,并且计算由如此所得的连接线包围的面积。然而,在别的实施例中,也可以通过别的方式来计算该面积。在这之后、同时或者在这之前,确定映射相应的面积的激光雷达点的数量。即,对位于上述连接线上的所有激光雷达点以及被该连接线所包围的激光雷达点进行合计,并且将映射该面积的激光雷达点的总数量除以该面积本身。然而,在别的实施例中,也可以通过别的方式来计算激光雷达点的数量。通过该方式,分别为所述面积确定点密度。
在该方法的第四步骤S4中,由所述两个点密度计算商,其中,在该实施例中,将较大的点密度除以较小的点密度。但是,在别的实施例中也可以以正好相反的方式来计算该商,即,将较小的点密度除以较大的点密度。
在第五方法步骤S5中,所使用的商用于求取激光雷达传感器的最大作用范围,为此使用先前保存的回归曲线。在该实施例中,为此在使用该商的框架中,将该商与事先为通过至少两个不同的点集所映射的面积所保存的至少一个回归曲线或者与为与这些面积基本上可比的面积所保存的回归曲线进行比对。换言之,在该实施例中使用上述经验值,所述经验值是为映射该预定义的环境对象的不同点集确定的。先前所保存的至少一个回归曲线在此使计算出的商与激光雷达传感器的最大作用范围关联起来。在该实施例中,该回归曲线纯粹示例性地作为神经网络的输出数据组得出。对于当前的实施例,在下文中对此详细地阐述:
在激光雷达传感器的视场中,由于激光雷达传感器在机动车中的使用,始终在该视场的相似的或重复出现的区域上检测地面的或土地的表面、例如道路,即在视场的下部区域中检测。在图2中示范性地且示意性地示出这样的视场,其中,图2未示出激光雷达点云本身,而是示出激光雷达传感器的视场中的示意性示出的(“真实的”)环境,该激光雷达传感器通过由其检测到的激光雷达3D点云对该环境进行映射(激光雷达映射本身在图2中未示出)。在该视场内,在一般情况下——与相应的场景无关——在虚线下方将示出地面的或土地的表面,激光雷达传感器在该地面或土地上运动或者位于该地面或土地上(在检测激光雷达点云的时刻)。
对于多个“训练场景”,现在借助上文提到的分类算法——在相应的激光雷达映射中,在该实施例中在激光雷达点云的区域内,借助该激光雷达点云经由激光雷达点映射在虚线下方的区域——将映射环境中的基本上平面的表面(在图2中例如是道路)的那些激光雷达点分类为“属于地面的/土地的表面”。然后,对于大量能够设想的点集/面积组合或对,所述点集/面积组合或对在映射该环境的3D点云中位于虚线下方的区域内,以如上所述的方式确定相应的密度,将所述相应的密度彼此相除,并且使所述相应的密度与相应的与场景相关的最大作用范围关联起来,并且将所述相应的密度作为数据组存储和处理。在此,相应的与场景相关的最大作用范围可以是对于每个单个的训练场景单独地或者但还可以是根据预确定的方法确定的或被确定。
在恶劣的天气条件下,例如在出现雾的情况下,出现与在阳光照射和/或蓝天的情况下不同的密度。因此得出不同的密度商并且同样得出激光雷达传感器的不同的、与该商相关联的最大作用范围。在该实施例中,神经网络从该数据集中针对每个点集组合或面积组合得出自己的回归曲线,该回归曲线使相应的密度商与激光雷达传感器的最大作用范围关联起来。然后,如果在根据本发明的方法的实施方案中针对确定的面积计算确定的密度商,则可以为该密度商——根据所保存的回归曲线——快速且简单地求取激光雷达传感器的最大作用范围。
再一次换一种表达方式阐明:
即,根据本发明,首先定义所谓的“地面实况”(在英语里通常称为“GroundTruth”),其中,借助测量以图形的方式确定该地面实况。在此为整个测量计算该地面实况,其中,该地面实况不随着时间发生变化。在此,先前提到的测量包括具有10%的反射率的目标。对于该时间帧,核查该目标的回声。在该实施例中,仅考虑每10m一帧(其中,这可能与测量出的作用范围相关)。然后,在附近区域中核查,点的预期数量是否与测量出的点的数量一致(不缺失点)。随着距离增加能够确定,一些点消失。对于每个所观察的图像,计算比例(测量出的目标点/预期的目标点)。如果该比例低于90%,则记录当前区域并且该当前区域用作用于整个测量的地面实况区域。
在此,本领域技术人员理解,先前提到的百分数是纯粹示例性地选择的。即,该测量也可以包括具有1%、2%、3%、4%或5%的反射率或具有15%、20%、25%、30%、35%、40%、45%、50%的反射率或具有更高的、更低的或完全不同的预定义的反射率的目标。此外,如果上述比例(测量出的目标点/预期的目标点)低于80%、70%、60%、50%、40%、30%、20%、10%或者低于完全不同的、预定义的值(该值也可以大于90%),则也可以记录当前区域并且该当前区域可以用作用于整个测量的地面实况区域。此外,也可以考虑每5米、每15米、每20米一帧或者完全不同的帧。
该回归曲线在此特定地用于感兴趣的对象或环境对象(例如道路上的彼此相距5m的两个区域等),因为应从所述对象中学习回归曲线。如果感兴趣的对象或环境对象发生变化(如果例如同一载重汽车的后侧在两个预定义的间距中构成感兴趣的对象或环境对象),则必须为该情况学习新的回归曲线。即,如果在一个实施例中该算法可以动态地选择应使用哪些感兴趣的对象或环境对象,则也使用不同的回归曲线。
在此应明确指出,在别的根据本发明的实施例中,也可以使用别的分类算法用于对别的预定义的环境对象进行分类。密度确定可以在使用该视场的完全不同的点集、面积或者区域的情况下进行。此外,也可以以完全不同的方式确定该回归曲线,并且也不必为此目的使用神经网络。
在该实施例中,不进一步细分激光雷达传感器的所观察的视场。即,仅存在单个的所谓的“视野(英语:Field of View)”。但是,也可以实施别的根据本发明的方法,在所述方法中,激光雷达传感器的总视场被细分为不同的子视场、即不同的“视野(英语:Field ofView)”,所述不同的视野共同形成该激光雷达传感器的总视场。然后,为每个单个的子视场或在每个单个的子视场内实施该方法,并且为每个单个的子视场求取激光雷达传感器的最大作用范围。然后,在另外的方法步骤中,由为每个子视场确定的最大作用范围——根据预确定的规则——求取用于总视场的最大作用范围。在图1中,这样的方法步骤作为可选的第六方法步骤S6画出,以便示出根据本发明的方法的流程图在这样的实施方案中看起来如何。
换言之,根据本发明的方法在上述实施例中基于对地面中的点的密度的分析。为了将这些点分类为地面,地面估计算法事先对示出地面平面的所有点进行分类。
该地面估计算法基于如下假设:车辆在一种类型的地面平面上驾驶,因此该地面估计算法与在该场景中的位于最远处的对象的存在无关。如果存在损害,例如激光器功率的降低或者不利的天气条件,则位于传感器附近的点子类往往具有较低的密度。相反,如果不存在损害,则该密度往往较高。为了相对于发生变化的表面条件具有稳健性,计算(在视场或者视野FoV内的)两个区域之间的商。
为此,该方法获得3D点云,对于该3D点云,属于地面的点是事先通过地面识别算法标记的,以及——如果为多个子视场实施根据本发明的方法——获得用于划分该视场的区段。
然后,实施下述方法步骤:
1.所提出的算法接收点云;
2.对于每个子视场、视野(英语:Field of View)FoV,创建两个点子集,所述点子集也被称为补丁,其中,仅使用标记为地面的点。
3.在同一子视场、FoV中寻找两个地面场(Bodenfeldern)。
4.计算各个地面场的面积。
5.计算每个地面场中的密度。
6.由所述密度计算商,以便降低表面类型的或者地面材料的影响。
7.确定激光雷达传感器的最大作用范围,其方式是,在回归范围曲线的或回归曲线的函数中使用该商。
8.输出以米为单位的距离。
为了辨认地面点,事先将地面估计算法应用于3D点云,该地面估计算法映射几乎平坦的区域。该地面不总是严格平坦的面积,因为该地面可以具有一些凹陷部或者隆起部,所述凹陷部或者隆起部被该算法所覆盖。
根据这些信息,计算所选择的两个面积的密度并且随后求取这两个密度的商。通过该方法,在估计作用范围时减小发生变化的地面材料的或者表面类型的影响。密度商直接与传感器可以测量的实际的作用范围成比例。为了找到该关系,借助先前检测到的和已知的数据求取曲线、即回归曲线。该函数在其最简单的形式中可以是线性直线,该线性直线将密度商映射到所估计的作用范围上。但是本发明不局限于此。
有利地,本发明提供一种用于也在受到噪声干扰的3D激光雷达点云中来确定最大作用范围的可能性。此外,可以为每个子视场(FoV)估计以米为单位的最大作用范围。此外,该解决方案是与场景无关的,即对激光雷达传感器的最大作用范围的确定与位于最远处的对象的识别无关。因此,提供一种稳健的解决方案,因为使用这些真实的数据。
即,本发明目的在于估计激光雷达传感器的检测作用范围。最大作用范围与多个因素相关,例如对象的反射能力。导致检测作用范围劣化的一些因素是天气条件,例如降水、雾、沙尘暴,和/或附近区域中的阻塞,例如泥浆、鸟粪、冰、雪、甲虫或者树叶。在这些情况下重要的是,总ADAS/AD系统可以以适宜的方式对这样的损害做出反应。ADAS/AD系统可以对此做出反应,其方式是,该ADAS/AD系统减小目标速度、将该目标速度传输给人类驾驶员或者在车道边缘上驾驶。除此之外,有限的检测区域和激光雷达传感器的有限的精度不能保证ADAS/AD系统的正常运行。
尽管已经通过优选的实施例更详细地示出和描述本发明,但是本发明不限于所公开的示例,并且由本领域技术人员能够在不脱离本发明的保护范围的情况下从中推导出其他变型方案。
- 旋转角传感器装置、激光雷达系统、工作装置和用于激光雷达系统的运行方法
- 旋转角传感器装置、激光雷达系统、工作装置和用于激光雷达系统的运行方法
- 多传感器设备和使用多传感器设备来确定主体的生物计量性质的方法
- 用于确定句子的领域的方法和设备及训练方法和训练设备
- 扫描范围的确定方法、医学图像的获取方法、装置和设备
- 用于激光雷达传感器的作用距离确定的方法
- 用于确定最大感知范围的方法、装置、设备以及存储介质