一种水下航行器用矢量推进器
文献发布时间:2024-04-18 19:48:15
技术领域
本发明涉及一种水下航行器的矢量推进器,属于海洋工程技术领域。它通过改变螺旋桨的推力方向来实现航行器推力的矢量化,它包含有由两个推杆控制的矢量机构以及一个主推电机驱动的推进装置,通过矢量机构控制推进装置实现俯仰和偏航两转动自由度运动并通过合成两自由度运动实现推力矢量化从而控制水下航行器的运动姿态。
背景技术
水下航行器作为一种水下机器人,具有较强的搭载能力和任务执行能力,多用于科学考察、水下探索、水上搜救等,在商业和军事领域也有较多应用。配备矢量推进器的水下航行器因其结构紧凑、运动灵活等优势是未来水下航行器重要的研究和发展的对象。矢量推进是指空间中运动的物体所受推力不仅具有向前的方向,还具有在物体俯仰和偏航两个方向的推力以部分或全部替代舵翼升力的推进方式称为矢量推进。
水下航行器的矢量推进技术的发展和应用在21世纪后才进入高速发展阶段,目前应用于水下航行器的矢量推进技术大致可分为螺旋桨式矢量推进和喷水式矢量推进。螺旋桨式矢量推进器是由螺旋桨旋转产生推力,通过改变螺旋桨朝向或通过多螺旋桨组合改变推力分配实现推力的矢量化,这种推进方式因结构简单、制造容易且成本相对低廉被广泛应用,但螺旋桨推进方式也有高速下会产生空泡导致推进效率下降,噪声和振动较大的缺点。喷水式矢量推进器是利用推进泵产生高速水流从喷口喷出通过高速水流的反作用力推动航行器运动,这种矢量推进方式具有更高的推进效率、更低的噪声和振动,多用于对速度和静音有要求的情况如军事侦察等,喷水式矢量推进器的缺点是其结构复杂、制造和安装较困难、重量大、成本高。
发明内容
为了提高水下航行器的机动性和灵活性,提供水下航行器在航行时所需的矢量推力,本发明提供一种水下航行器的矢量推进器,该矢量推进器结构简单紧凑、运动灵活、节省航行器艉部空间、成本低廉,能够很好地为水下航行器提供矢量推力。
本发明提出一种水下矢量推进器,包括水下航行器舱体、安装在水下航行器舱体中的矢量机构和推进装置,其中,所述矢量机构包括:
一级机构,为一级推杆驱动的曲柄摇块机构,包括一级推杆安装座、一级推杆、连接环、俯仰轴承,一级推杆的一端以铰链连接的方式通过一级推杆安装座安装在航行器舱体端面,一级推杆的另一端以铰链连接的方式与连接环连接,连接环通过安装在航行器舱体的俯仰轴承与航行器舱体形成具有俯仰自由度的转动副;
二级机构,为二级推杆驱动的曲柄摇块机构,包括二级推杆支架、二级推杆安装座、二级推杆、推进装置,二级推杆支架与连接环固连为一整体,二级推杆的一端以铰链连接的方式通过二级推杆安装座安装在二级推杆支架上,二级推杆的另一端以铰链连接的方式与推进装置相连;
所述推进装置,包括电机舱端盖、电机舱、连接舱、尾椎、主推电机、联轴器、传动轴、传动轴轴承、螺旋桨、偏航轴承、螺栓轴,主推电机安装在电机舱内,电机舱端盖安装在电机舱前端面,电机舱后部通过连接舱与尾椎相连,传动轴通过传动轴轴承安装在尾椎上并在前端通过联轴器与主推电机相连,螺旋桨安装在传动轴末端;偏航轴承成对安装在推进装置的电机舱上,并通过螺栓轴与连接环相连;
所述的一级机构推杆、二级机构推杆为防水电动推杆,矢量机构整体浸入水中;
所述的推进装置内部为密封空间,电机舱端盖、电机舱两零件上装有径向密封环;连接舱与传动轴之间装有动密封环;连接舱外部的传动轴以及传动轴轴承均浸入水中;
所述的俯仰轴承通过俯仰轴承安装座安装在水下航行器舱体上;
总体而言,本发明所构思方案较现有技术相比优势在于:
1)本发明将两平面连杆机构相耦合,该方案相较于并联机构、球齿轮机构等更容易控制;
2)本发明将主推电机、传动轴以及螺旋桨整体封装,使得推进器整体在保证推力的情况下机构更加紧凑,为矢量机构的动作留出空间,同时整体封装机构解决了主推电机的防水问题;
3)矢量机构由防水电动推杆驱动和控制,结构简单,具有较好的互换性和可维修性,同时其可移植性也更好,可以为不同尺寸的水下航行器选用不同尺寸的机械零件。
附图说明
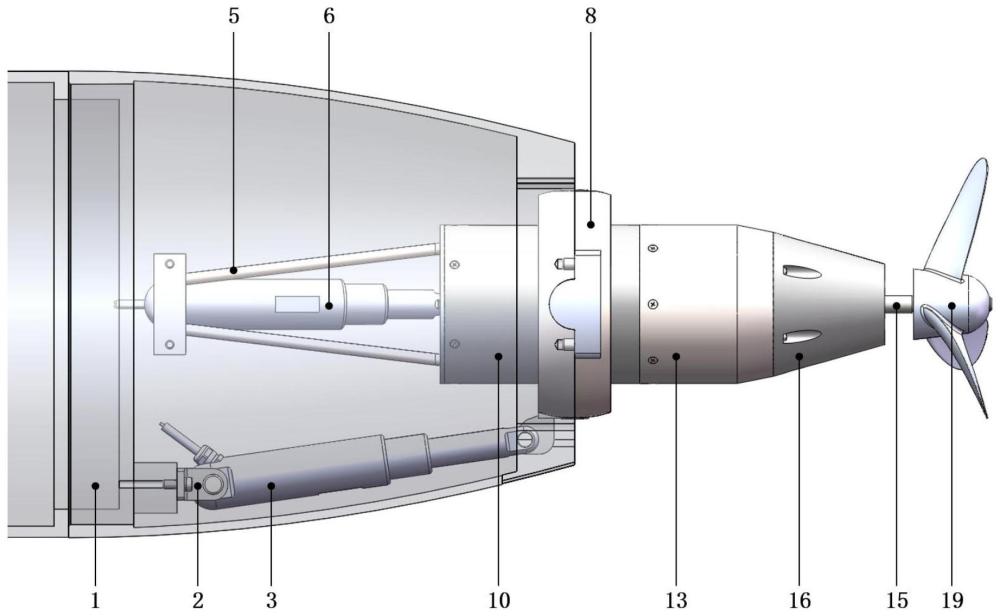
图1为矢量推进器总体结构示意图;
图2为矢量推进器安装结构示意图;
图3为矢量机构工作原理示意图;
图4为矢量推进器俯仰情况示意图;
图5为矢量推进器偏航情况示意图;
图6为矢量推进器工作情况示意图。
图中:1、水下航行器舱体;2、一级推杆安装座;3、一级推杆;4、二级推杆安装座;5、二级推杆支架;6、二级推杆;7、螺栓轴;8、连接环;9、电机舱端盖;10、电机舱;11、俯仰轴承;12、主推电机;13、连接舱;14、联轴器;15、传动轴;16、尾椎;17、偏航轴承;18、传动轴轴承;19、螺旋桨。
具体实施方式
下面结合一款中型鱼雷式水下航行器对本发明的工作过程进行阐述。
本发明的目的是利用矢量推进器直接改变螺旋桨的推力方向,从而代替舵翼升力控制航行器的航行姿态。由于通过舵翼获得升力的条件是航行器自身需要具有一定速度,且航行器所获得升力的大小与航行器本身航速有直接关系,一般来说航速越快能够获得的升力就越大,这就导致了水下航行器在低速度或无速度时很难自主调整姿态。本发明通过将螺旋桨的推力矢量化从根本上解决了上述问题,大幅提升了水下航行器的操纵性和灵活性尤其是在低速时的灵活性,并在此基础上增加了矢量推进器的紧凑型、减小了动力系统所占用的空间,能够满足不同类型水下航行器的工作需要。
如图3矢量机构工作原理图,矢量机构是由两个安装在互相垂直平面内的两个曲柄摇块机构耦合而成,安装在竖直平面的由一级推杆3驱动的曲柄摇块机构控制推进系统进行俯仰运动,安装在水平面的由二级推杆6驱动的曲柄摇块机构控制推进系统进行偏航运动,连接环8可将俯仰运动和偏航运动相耦合实现推力的矢量化。
在推进系统方面,如图2矢量推进器安装结构示意图中推进系统部分,包括电机舱端盖9、电机舱10、连接舱13、尾椎16、主推电机12、联轴器14、传动轴15、传动轴轴承18、螺旋桨19、偏航轴承17、螺栓轴7。主推电机安装在电机舱内,电机舱10前部通过与电机舱端盖9之间的径向静密封环实现密封,同时电机舱10后部通过与连接舱13之间的径向静密封环实现密封;主推电机12通过联轴器14将扭矩传递至传动轴15,传动轴15与连接舱13之前通过旋转动密封环实现密封,并将扭矩传递给螺旋桨19,电机舱端盖9、电机舱10与连接舱13所围成的空间为密闭空间。
在水下航行器保持直航状态时,主推电机12驱动螺旋桨19旋转,一级推杆3与二级推杆6保持自锁状态。当航行器需要下潜时,一级推杆3减小长度,驱动推进系统向下俯,此时的推力可分解为沿航行器轴线方向的推力和使航行器向下俯的力矩;若航行器需要上浮,一级推杆3增加长度,驱动推进系统上仰,此时的推力可分解为沿航行器轴线方向的推力和使航行器向上仰的力矩。与下潜上浮相似,当航行器需要转向即进行左右偏航运动时,二级推杆6进行推出或缩回运动,驱动推进系统左偏或右偏从而使航行器进行左、右偏航运动。