一种用于混凝土搅拌车的自动录像系统及其录像方法
文献发布时间:2024-04-18 19:48:15
技术领域
本发明属于混凝土监测设备技术领域,尤其涉及一种用于混凝土搅拌车的自动录像系统及其录像方法。
背景技术
预拌混凝土质量直接影响到建设工程结构实体混凝土质量,但结构实体混凝土质量又不仅仅取决于预拌混凝土质量,同时还取决于浇筑、振捣、养护等施工工艺是否规范、合理。在实际建设工程项目中,结构实体质量缺陷难以完全杜绝,经常造成预拌混凝土供需双方(即预拌混凝土生产企业和施工单位)之间就质量问题产生原因及责任归属产生严重分歧。
根据国家、行业和地方有关标准规范,预拌混凝土生产企业对运送至交货地点的预拌混凝土质量负责,需方负责组织实施预拌混凝土质量交货检验,预拌混凝土质量验收以交货检验结果作为依据,即交货检验是供需双方确定产品质量是否满足要求的手段。交货检验项目包括现场取样检测的混凝土坍落度、混凝土强度等,其中坍落度检验应在施工现场混凝土搅拌运输车卸料口取样。交货检验的取样频率为同一工作班拌制的同配合比混凝土,每100盘但不超过100m
因此急需一种录像系统在每车混凝土卸料时进行视频录像,保存视频数据,用于后续责任归属的辅助证据。
发明内容
本发明公开一种用于混凝土搅拌车的自动录像系统及其录像方法,主要解决目前混凝土拌合物卸料时混凝土的状态数据拍摄记录的问题。
[本发明公开一种用于混凝土搅拌车的自动录像系统]
为实现所述目的,本发明提供一种用于混凝土搅拌车的自动录像系统,包括设置在搅拌车上的控制开关、正反转检测装置、摄像装置以及无线路由器,所述摄像装置、正反转检测装置均与控制开关电性连接,所述控制开关还通讯连接有控制终端,所述控制终端还通过无线路由器与摄像装置连接。
优选的,所述摄像装置包括摄像机主体、设置在摄像机主体上的镜头以及设置在摄像主体上用于镜头清洁的清洁装置。
优选的,所述清洁装置包括设置在摄像机主体内的第一电机、与第一电机输出端连接的转板以及设置在转板上的清洁组件,所述转板可将镜头覆盖。
优选的,所述清洁组件包括设置在转板上的第二电机、转动设置在转板内的第一转筒和第二转筒以及设置在转板背面的刮板,所述第一转筒与第二转筒之间通过皮带传动,所述第一转筒与第二电机输出端连接,所述第二转筒与刮板连接,所述转板背面设置有圆形槽,所述转板转动设置在圆形槽内,所述刮板表面采用柔性材料制成。
优选的,所述正反转检测装置包括安装支架、可拆装设置在安装支架上的感应器以及与感应器感应的发射器,所述感应器内集成有单片机、与单片机电性连接的第一传感器和第二传感器,所述第一传感器、第二传感器在感应范围内可接收发射器发射的感应信号。
优选的,所述第一传感器和第二传感器均为霍尔传感器,所述发射器为磁铁。
优选的,所述安装支架包括用于感应器安装在搅拌车上的底架、设置在底架上用于感应器安装的顶架,所述底架内设置有第一安装槽,所述顶架内设置有用于感应器安装的第二安装槽。
优选的,所述底架的侧壁上设置有锁紧螺杆,所述顶架的侧壁上也设置有锁紧螺杆。
优选的,所述感应器表面设置有指示灯。
优选的,所述感应器外接有四根不同颜色的信号线。
优选的,所述安装支架采用不锈钢材质制成。
优选的,所述感应器的外壳材质为环氧树脂。
[本发明还公开一种混凝土搅拌车的自动录像方法]
一种混凝土搅拌车的自动录像方法,采用混凝土搅拌车的自动录像系统进行录像,步骤如下:
感应步骤:通过正反转检测装置检测搅拌车的搅拌筒正反转,当检测到搅拌筒开始反转时,将信号通过无线路由器传送至控制终端;
录像步骤:控制终端接收到搅拌筒反转的信号,并在信号持续一定时间后,通过控制开关自动开启录像装置进行录像,直至录像结束;
视频存储步骤:录像结束后的数据文件通过无线路由器传输存储在控制终端的存储单元内。
本发明提供的技术方案至少具有如下技术效果:
本发明公开的混凝土搅拌车的自动录像系统,通过正反转检测装置检测搅拌车搅拌筒的正反转,当检测到搅拌筒反转进行卸料时,将信号发送至控制终端,当控制终端收到搅拌筒的反转信号,通过控制开关控制录像装置进行录像,并将录像好的视频数据存储至控制终端,因此后续可通过查看视频数据内的视频录像来判断混凝土的状态,当出现责任归属问题时,起到辅助证明的作用。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
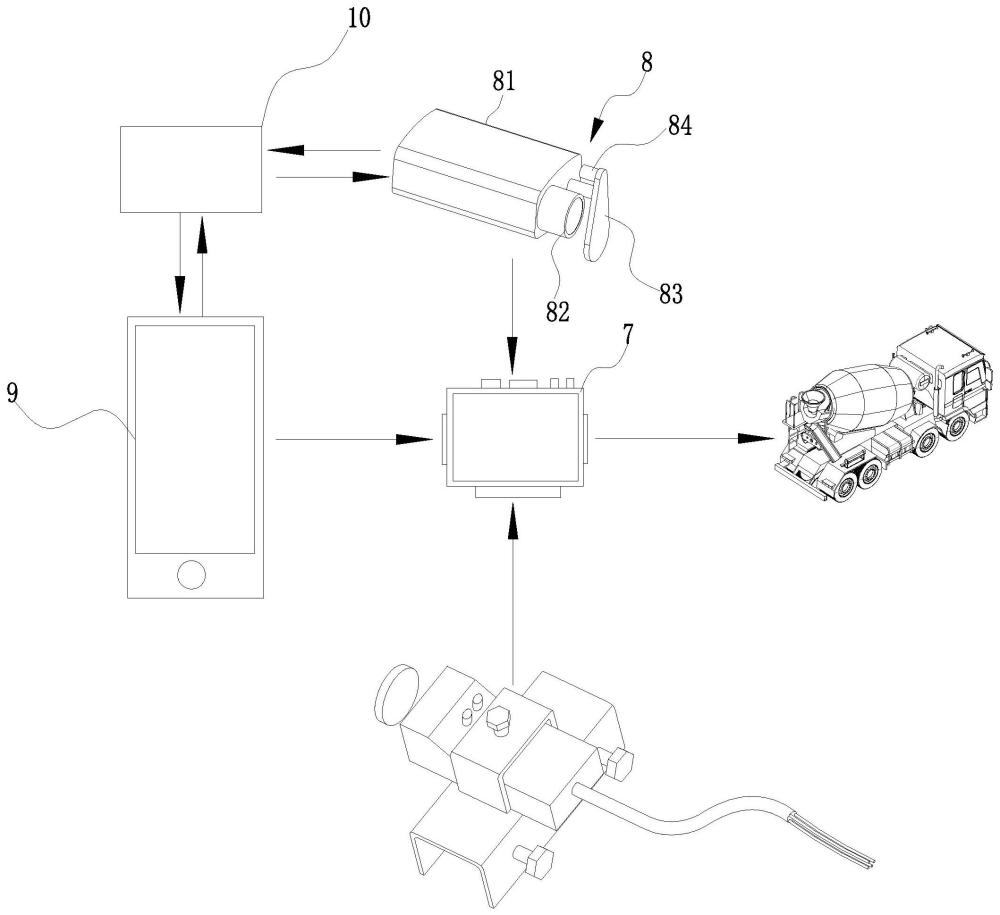
图1为本发明实施例混凝土搅拌车的自动录像系统的连接结构示意图;
图2为本发明实施例传感装置的结构示意图;
图3为本发明实施例感应器的内部结构示意图;
图4为本发明实施例转板的内部结构示意图;
图5为本发明实施例刮板的分布结构示意图;
主要附图标记说明:1、安装支架;11、底架;111、第一安装槽;12、顶架;121、第二安装槽;2、感应器;3、发射器;4、锁紧螺杆;5、指示灯;6、信号线;7、控制开关;8、摄像装置;81、摄像机主体;82、镜头;83、转板;84、第二电机;85、第一转筒;86、第二转筒;87、皮带;88、刮板;89、圆形槽;9、控制终端;10、无线路由器。
具体实施方式
下面详细描述本发明的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明的实施例,而不能理解为对本发明的限制。
在本发明实施例的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本发明实施例的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
参照图1,本实施例公开一种用于混凝土搅拌车的自动录像系统及其录像方法;混凝土搅拌车的自动录像系统,包括设置在搅拌车上的控制开关7、正反转检测装置、摄像装置8以及无线路由器10,所述摄像装置8、正反转检测装置均与控制开关7电性连接,所述控制开关7还通讯连接有控制终端9,所述控制终端9还通过无线路由器10与摄像装置8连接,通过无线路由器10实现控制终端9与摄像装置8之间的信号和数据的传输。控制开关7主要采用4G控制开关7或5G控制开关7,主要用于接收正反转状态信号,并判断反转持续时间;当反转信号持续一定时间时,通过无线路由器10向录像装置发出录制视频的指令;之后接收视频数据;同时可用于调取视频数据,控制开关7通过网络与控制终端9连接,控制终端9采用电脑或手机,本实施例中采用手机软件进行控制,摄像装置8主要安装在搅拌车的尾部,对着卸料槽,用于卸料时混凝土状态视频的拍摄。
参照图1,所述摄像装置8包括摄像机主体81、设置在摄像机主体81上的镜头82以及设置在摄像主体上用于镜头82清洁的清洁装置,由于整个镜头82位于进料口位置附近,且长期暴露在环境之中,镜头82表面难免会有灰尘堆积,为了保证视频拍摄的清晰度,清洁装置主要用于镜头82表面灰尘的清理,参照图4、图5,所述清洁装置包括设置在摄像机主体81内的第一电机、与第一电机输出端连接的转板83以及设置在转板83上的清洁组件,所述转板83可将镜头82覆盖,所述清洁组件包括设置在转板83上的第二电机84、转动设置在转板83内的第一转筒85和第二转筒86以及设置在转板83背面的刮板88,所述第一转筒85与第二转筒86之间通过皮带87传动,所述第一转筒85与第二电机84输出端连接,所述第二转筒86与刮板88连接,所述转板83背面设置有圆形槽89,所述转板83转动设置在圆形槽89内,所述刮板88表面采用柔性材料制成。
清洁原理:当需要对镜头82进行清理时,可启动第一电机,第一电机带动转板83转动,使得转板83将镜头82表面覆盖,同时刮板88位于镜头82表面,刮板88表面可以采用橡胶层材质制成,起到保护镜头82的作用,然后启动第二电机84,第二电机84通过第一转筒85和皮带87带动第二转筒86转动,继而带动刮板88转动,使得刮板88在镜头82表面转动,对镜头82表面的灰尘进行清理,保证视频拍摄的清晰度,当镜头82不需要进行拍摄时,刮板88始终覆盖在镜头82表面,起到保护镜头82的作用。
参照图2、图3,正反转检测装置包括安装支架1、可拆装设置在安装支架1上的感应器2以及与感应器2感应的发射器3,整个安装支架1采用304不锈钢材质制成,感应器2的壳体采用ABS加环氧树脂材料制成,发射器3主要采用磁铁,安装支架1主要用于将感应器2安装在搅拌车的固定支架上,使得感应器2正对着搅拌筒的边缘,将发射器3固定在搅拌筒上,当搅拌筒转起来后,发射器3可以经过感应器2的感应区,所述安装支架1包括用于感应器2安装在搅拌车上的底架11、设置在底架11上用于感应器2安装的顶架12,所述底架11内设置有第一安装槽111,所述顶架12内设置有用于感应器2安装的第二安装槽121,所述底架11的侧壁上设置有锁紧螺杆4,所述顶架12的侧壁上也设置有锁紧螺杆4;通过第一安装槽111安装在搅拌车的固定支架上,并通过锁紧螺杆4进行锁紧,感应器2被安装在第二安装槽121内,也通过锁紧螺杆4进行锁紧,具体锁紧螺杆4的数量可根据实际情况设定,感应器2的探头端靠近发射器3的一侧,所述感应器2内集成有单片机、与单片机通过外围电路电性连接的第一传感器和第二传感器,所述第一传感器、第二传感器在感应范围内可接收发射器发射的感应信号。所述第一传感器和第二传感器均为霍尔传感器,所述发射器3为磁铁;所述感应器2外接有四根不同颜色的信号线6;具体分别为红、黑、绿,黄,红色为正极(9-36V电压),黑色为负极,绿色、黄色均为双霍尔感应信号输出。所述感应器2表面设置有指示灯5,本实施例中设置有两个指示灯5,分别为红色指示灯5和绿色指示灯5。
工作原理:先将感应器2探头与安装支架1连接固定成一体,在整体靠近轴、轮的检测部位(注意感应器2探头与磁铁间隔,磁铁固定于搅拌筒的轴、轮上);借助原车螺丝,先松开固定螺丝,调整好感应器2距离后再紧固锁紧螺杆4;正确接好线路后,使水泥罐车搅拌筒处于转动状态,观察感应器2上指示灯5闪烁情况;
正转时:指示灯5绿灯常亮,只有磁铁经过感应器2探头时闪烁下;
反转时:指示灯5红灯常亮,只有磁铁经过感应器2探头时闪烁下;
停转时:指示灯5红灯闪烁;特别注意当停转时磁铁刚好在探头位置时指示灯5不亮, 也为正常)。
指示灯5闪烁情况不对时,转动感应器2探头进行调试直到指示灯5闪烁正常。
调试好感应器2角度后,固定住感应器2探头与安装支架1,在安装支架1与感应器2的锁紧螺杆4以及与原车螺丝处各滴一滴螺丝紧固胶,防止螺丝松动。磁铁只有 S 极朝着感应器2探头才能正常运转,另一面朝着感应器2探头无法工作(工作与否,请参照感应器2的指示灯5闪烁情况,磁铁 S 极朝着感应器2探头时指示灯5有变化;磁铁另一面朝着感应器2探头时指示灯5没有变化)。
当磁铁靠近霍尔传感器一、霍尔传感器二时,霍尔传感器一、霍尔传感器二,将信号反馈给单片机,单片机通过判断接收信号的时间先后,来确定磁铁的运动方向,当磁铁是从左到右时,单片机先接收到霍尔传感器二的信号,再接收到时霍尔传感器一的信号,通过外围电路控制绿线(OUT1)输出高电平,黄线(OUT2)输出低电平;当磁铁是从右到左时,单片机先接收到霍尔传感器一的信号,再接收到时霍尔传感器二的信号,通过外围电路控制绿线(OUT1)输出低电平,黄线(OUT2)输出高电平;当磁铁不动,感应器2持续 3 分钟没有检测到磁铁,黄(OUT2)绿(OUT1)两条信号线6输出电压都为低电平; 当磁铁不动,正反转传感器持续 3 分钟都检测到磁铁,黄(OUT2)绿(OUT1)两条信号线6输出电压都为高电平。
自动录像原理:视频信号处于常开状态,当正反转检测装置检测到搅拌筒反转进行卸料时(工作人员须操作搅拌筒反转才能卸料),将信号发送至手机终端,当手机终端收到搅拌筒的反转信号,并持续一定时间(时间可设定,如30s)后,通过控制开关7控制录像装置进行录像,自动录制一段视频(视频录制时间可设定,如15s),以“【工程名称】+【浇筑部位】+【浇筑时间】+【车牌号】”命名视频文件,并将录像好的视频数据存储至手机终端,因此后续可通过查看视频数据内的视频录像来判断混凝土的状态,当出现责任归属问题时,起到辅助证明的作用。
以上仅为本发明的较佳实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。