一种基于人工智能的垃圾自动收集、识别和分类系统
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及垃圾处理技术领域,具体涉及一种基于人工智能的垃圾自动收集、识别和分类系统。
背景技术
当前家庭垃圾的分类和处理是现实生活中的一大痛点,也是政府管理的一大难点。当下的家庭生活垃圾的分类和处理基本靠人工,由于人们缺乏垃圾分类意识,垃圾处理的效率低、分类效果差,尤其是城市小区内高楼住户的家庭垃圾,基本上无法实现分类处理。
发明内容
本发明的目的在于提供一种基于人工智能的垃圾自动收集、识别和分类系统,其解决了目前家庭垃圾分类和处理的效率低、效果差问题。
本发明通过以下技术方案来实现上述目的:
一种基于人工智能的垃圾自动收集、识别和分类系统,所述系统针对多楼层楼房设置,其包括
垃圾投递口,所述垃圾投递口设于各楼层,每个垃圾投递口处均设有用于确定垃圾类别的类别确定装置,所述类别确定装置包括有用于垃圾类别查询的查询模块,以及用于获取垃圾图像及物理数据并根据数据对垃圾类别初步分类的第一识别模块;
传送管网,所述传送管网根据垃圾类别分为若干根相互独立的分类管道,每根分类管道均与各个垃圾投递口连通;
识别分拣装置,所述识别分拣装置连接于各分类管道的出口端,识别分拣装置包括有用于获取垃圾图像及物理数据并根据数据对垃圾类别细分的第二识别模块;
分类存储单元,所述分类存储单元连接于识别分拣装置的出口端,用于根据垃圾的细分类别将垃圾分类存储;
服务器,所述服务器通过网络与类别确定装置以及识别分拣装置连接,服务器被配置为存储垃圾查询与识别所依据的本地模型,同时被配置为从垃圾投递口采集已确定类别垃圾的对应数据,并将该数据作为本地模型的训练样本数据,进行模型训练,训练后同步更新服务器内所存储的本地模型。
进一步改进在于,每根分类管道由竖直管段和水平管段组成,其中竖直管段与各个垃圾投递口连通,且在连通位置设有用于将垃圾导入与垃圾类别相对应分类管道内的第一引导机构,其中水平管段连接于竖直管段的底部,且在水平管段内设有用于将垃圾推送至水平管段出口端的推送机构。
进一步改进在于,所述水平管段内进一步设有用于感应是否有垃圾的垃圾感应器,所述垃圾感应器的信号输出端与推送机构的控制端连接,垃圾感应器在水平管段内出现垃圾时感应到信号,并根据信号启动推送机构将垃圾推送至出口端。
进一步改进在于,所述分类管道包括
可回收垃圾管道,用于传送可回收垃圾;
不可回收垃圾管道,用于传送干垃圾、湿垃圾、未知类别垃圾和混合垃圾;
有害垃圾管道,用于传送有害垃圾。
进一步改进在于,所述不可回收垃圾管道内设有用于将混合垃圾分离的分离机构。
进一步改进在于,所述第一识别模块和第二识别模块均包括多个传感器以及与各个传感器双向通信连接的处理器。
进一步改进在于,所述识别分拣装置内进一步设有用于将垃圾导入与垃圾类别相对应分类存储单元内的第二引导机构。
进一步改进在于,所述服务器进一步被配置为:定时或者采集积累了一定量的样本数据后,启动模型训练。
本发明的有益效果在于:
(1)本系统在垃圾投递口和垃圾出口均带有垃圾识别分类功能,在垃圾投递口,根据系统现有的模型,对用户投递的垃圾进行初步的识别,便于用户投递时进行垃圾分类的选择,同时也培养了人们垃圾分类的意识和对垃圾类别的认识。
(2)本系统服务器从垃圾投递口采集已确定类别垃圾的对应数据,并将该数据作为本地模型的训练样本数据,当积累到一定量时,系统在新采集的样本数据上启动模型训练,优化并更新系统本地模型,提高系统的垃圾识别能力,并同步更新垃圾投递口查询模块中的数据,持续为垃圾识别和分拣提供服务,从而实现系统的自我学习和进化。
(3)该系统尤其适合多楼层楼房住户的垃圾处理,解决了家庭垃圾分类和处理这一大痛点,足不出户即可实现垃圾的投递,提高了家庭垃圾处理效率以及处理效果。
附图说明
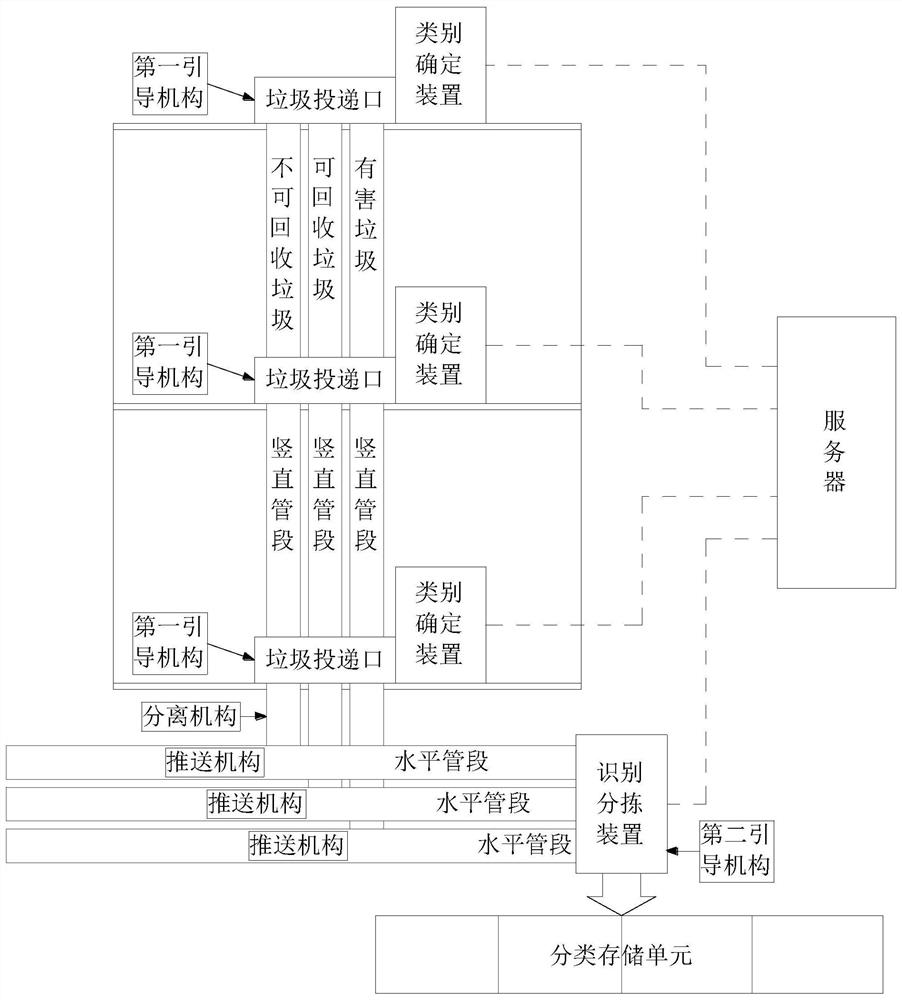
图1为本发明的系统原理图;
图2为类别确定装置的示意图;
图3为识别分拣装置的示意图。
具体实施方式
下面结合附图对本申请作进一步详细描述,有必要在此指出的是,以下具体实施方式只用于对本申请进行进一步的说明,不能理解为对本申请保护范围的限制,该领域的技术人员可以根据上述申请内容对本申请作出一些非本质的改进和调整。
结合图1至图3所示,一种基于人工智能的垃圾自动收集、识别和分类系统,系统针对多楼层楼房设置,其包括
垃圾投递口,垃圾投递口设于各楼层,具体可直接设置在各楼层的住户门口,每个垃圾投递口处均设有用于确定垃圾类别的类别确定装置,类别确定装置包括有用于垃圾类别查询的查询模块,以及用于获取垃圾图像及物理数据并根据数据对垃圾类别初步分类的第一识别模块;
传送管网,传送管网根据垃圾类别分为若干根相互独立的分类管道,每根分类管道均与各个垃圾投递口连通;
识别分拣装置,识别分拣装置连接于各分类管道的出口端,识别分拣装置包括有用于获取垃圾图像及物理数据并根据数据对垃圾类别细分的第二识别模块;
分类存储单元,分类存储单元连接于识别分拣装置的出口端,用于根据垃圾的细分类别将垃圾分类存储;
服务器,服务器通过网络与类别确定装置以及识别分拣装置连接,服务器被配置为存储垃圾查询与识别所依据的本地模型,同时被配置为从垃圾投递口采集已确定类别垃圾的对应数据,并将该数据作为本地模型的训练样本数据,进行模型训练,训练后同步更新服务器内所存储的本地模型。
需要说明的是,上述类别确定装置可以为人机交互设备,其带有触控显示屏,并配备摄像头等多种传感器。一方面,类别确定装置通过查询模块给用户提供垃圾类别查询功能,用户可以输入某种具体物品,系统会提示该垃圾为何种类别。另一方面,系统可以通过第一识别模块向用户提供类别识别功能,具体为:通过摄像头等传感器拍摄垃圾图像以及其他物料参数数据,根据这些数据进行智能识别,并向用户提示垃圾的类别。确定垃圾类别后,通过触控屏选择垃圾类别,类别确定装置内置处理器,处理器获取用户选择的垃圾类别后,控制相应机构进行分类引导,使得垃圾进入不同的分类管道。
在投递垃圾时,必须选择垃圾类别,否则无法投递,通过这种设置逐步培养人们垃圾分类的意识以及对垃圾类别的认识。按照国家垃圾分类标准,系统设置可回收垃圾、干垃圾、湿垃圾、有害垃圾,本系统增加混合垃圾新类别,这为用户投递已经混杂在一起的混合垃圾提供一个可行的选择,就从目前来看,这种垃圾可能更常见,但是,本系统一旦广泛使用,垃圾投递更加便捷后,这种混合垃圾将会逐步减少。
本发明中,每根分类管道由竖直管段和水平管段组成,其中竖直管段从上往下在楼房各楼层安装,竖直管段与各个垃圾投递口连通,且在连通位置设有用于将垃圾导入与垃圾类别相对应分类管道内的第一引导机构,其中水平管段在地面或地下安装,水平管段连接于竖直管段的底部,且在水平管段内设有用于将垃圾推送至水平管段出口端的推送机构。用户投递垃圾后,第一引导机构将垃圾引导至对应的分类管道中,且垃圾首先进入到竖直管段中,利用垃圾自身重力因素掉落到地下的水平管段中,水平管段内进一步设有用于感应是否有垃圾的垃圾感应器,垃圾感应器可以为光敏传感器、超声波传感器、压力传感器等,垃圾感应器的信号输出端与推送机构的控制端连接,垃圾感应器在水平管段内出现垃圾时感应到信号,并根据信号启动推送机构将垃圾推送至出口端,以等待进一步的识别分拣。
特别的,上述第一引导机构的具体结构可以为多种,此处不作限定,仅列举其中一种:第一引导机构包括柔性传输筒、水平轨道和移动座,其中柔性传输筒(可以为防渗纤维布+金属环向骨架材质制成)可任意弯曲,其顶端与垃圾投递口连通,其底端安装在移动座上,移动座则活动安装在水平轨道上,移动座可通过电机或伸缩气缸等驱动件进行驱动,以在水平轨道上来回移动,几根分类管道的入口并排设置,且均位于水平轨道的正下方,类别确定装置的处理器根据垃圾类别控制移动座移动,使柔性传输筒的底端对准相应的分类管道入口,这样投递的垃圾就会自动落入相应的分类管道内进行传送。
同样,上述推送机构的具体结构可以为多种,此处不作限定,仅列举其中一种:推送机构包括推盘、电动伸缩杆,其中推盘与水平管段尺寸相匹配的,电动伸缩杆的输出端与推盘连接,当水平管段内掉落垃圾时,电动伸缩杆推动推盘在管内移动,使得垃圾被推送至水平管段的出口端(即传送管网出口端)。
本发明中,为了传送不同类别垃圾,同时也考虑现实的可行性,设置三个分类管道,具体为:
①可回收垃圾管道,用于传送可回收垃圾;
②不可回收垃圾管道,用于传送干垃圾、湿垃圾、未知类别垃圾和混合垃圾;
③有害垃圾管道,用于传送有害垃圾。
其中,对于不可回收垃圾,由于投递时包括有未知垃圾和混合垃圾,这部分垃圾的处理最复杂。为此,本发明在不可回收垃圾管道内设有用于将混合垃圾分离的分离机构。当用户投递的是混合垃圾或者未知类别的垃圾时,用户就选择混合垃圾进行投递,系统对混合垃圾进行特有的处理,首先分离机构对混合垃圾进行分离,然后再利用不可回收垃圾管道传送,最后对分离后的每个垃圾个体进行识别和分拣,从而实现混合垃圾的分类处理。
特别的,上述分离机构的具体结构可以为多种,此处不作限定,仅列举其中一种:分离机构包括暂存箱、破袋刀片、振动输送带,暂存箱敞口设置,用于承接掉落的混合垃圾,破袋刀片安装在暂存箱内,并连接有驱动电机,用于对可能出现的混合垃圾外包装(垃圾袋等)进行破袋,使垃圾打散,振动输送带一端接入暂存箱内,用于将打散后的垃圾缓慢输送出来,并让垃圾继续在竖直管段内下落输送,在掉落过程中,垃圾均分离成个体。
本发明中,上述识别分拣装置用于对已经初步分类的垃圾进行再次细分,例如:对于可回收垃圾,第二识别模块利用人工智能识别技术将进一步细分成塑料、金属、布类、玻璃等具体类别;对于不可回收垃圾,由于投递时有未知垃圾和混合垃圾,通过分离机构以及第二识别模块分离出其中的可回收垃圾、有害垃圾及二级类别。
本发明中,在垃圾最后的汇集点,根据实际需求和细分类别设置分类存储单元,分类存储单元可以为多个独立的垃圾存放箱,各存放箱的入口同时对准识别分拣装置,由识别分拣装置控制选择具体对应的存储箱存放。通过前一环节识别分拣装置的垃圾再分类,大部分垃圾已经分门别类,不同类别的垃圾分拣到不同的存储单元,从而实现垃圾的智能识别和分类。此处,识别分拣装置内同样可以设有用于将垃圾导入与垃圾类别相对应分类存储单元内的第二引导机构。第二引导机构的具体结构可以为多种,此处不作限定,例如与第一引导机构类似,包括柔性传输筒、水平轨道和移动座,区别在于柔性传输筒有三个,柔性传输筒顶部分别与三根分类管道连接,水平轨道和对应的移动座也需要三组,三条轨道平行设置,柔性传输筒的底端连接在移动座上,避免相互阻碍,每条轨道下方设置该分类管道内可能传送垃圾类别对应的存储单元入口,例如可回收垃圾管道对应的轨道下方需要设置塑料、金属、布类、玻璃等存储单元入口,而针对不可回收垃圾管道,由于其包含混合垃圾,所以在其对应的轨道下方需要设置所有细分类型的存储单元入口。
本发明中,服务器主要是一套人工智能模型训练服务器群,服务器通过网络与类别确定装置以及识别分拣装置连接,服务器被配置为存储垃圾查询与识别所依据的本地模型,同时服务器从垃圾投递口采集已确定类别垃圾的对应数据,并将该数据作为本地模型的训练样本数据,当积累到一定量时,系统在新采集的样本数据上启动模型训练,优化并更新系统本地模型,提高系统的垃圾识别能力,并同步更新垃圾投递口查询模块中的数据,持续为垃圾识别和分拣提供服务,从而实现系统的自我学习和进化。
需要说明的是,上述第一识别模块和第二识别模块均包括多个传感器以及与各个传感器双向通信连接的处理器。传感器类型可以为摄像头、压力传感器、色彩传感器、超声波传感器、红外传感器、金属传感器等,根据需要具体设置;而处理器一方面可在需要的时候控制各传感器进行数据获取,另一方面可根据传感器获取的数据进行垃圾类型的判断。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
- 一种基于人工智能的垃圾自动收集、识别和分类系统
- 一种基于垃圾分类识别系统的人工智能机器人