一种走航式温盐深剖面测量仪器收放装置及收放方法
文献发布时间:2023-06-19 10:10:17
技术领域
本发明涉及深海大洋走航过程中进行温盐深测量仪装置,具体来说是一种走航式温盐深剖面测量仪器收放装置及收放方法;
背景技术
在进行海洋温盐深剖面数据测量时,大致分为定点测量和走航测量两种方式。定点测量如温盐深剖面仪(CTD);走航测量主要有投弃式CTD剖面仪(XCTD),可回收式CTD剖面仪(UCTD),MVP等。其中定点CTD无法满足走航时获取数据的需求。XCTD是投弃式仪器,测量剖面接近于垂直,并且不可以进行回收,相对来说使用成本较高,而且抛弃的CTD探头及材料也会相对造成一定的海洋污染。MVP是通过不断释放和回收绞车的缆绳,可使得测量的剖面接近垂直,而且在船只航行更多距离时可以测量更多的剖面。该系统体积较大,造价昂贵。走航式温盐深剖面仪可以通过对应的收放装置来实现测量剖面的数据,该回收装置轻便小巧,造价较低,同时可操控性好。在未来走航式温盐深剖面测量领域大有用武之地。因此研究开发一款小巧轻便的易于操控的回收装置就显得尤为重要。
发明内容
为解决上述问题,本发明的目的在于提供一种走航式温盐深剖面测量仪器收放装置及收放方法。
本发明为实现上述目的所采用的技术方案是:一种走航式温盐深剖面测量仪器收放装置,包括电控柜、底板、电机、中板、左侧板、右侧板、后板、收放缆机构、前板、排缆器机构、A架、张力传感器、编码器、尾滑轮、上护罩和下护罩;
其中,所述电控柜安装在底板顶面一侧,电控柜与后板通过螺栓连接;所述电控柜通过电缆线分别与电机、收放缆机构以及排缆器机构连接;
所述上护罩与下护罩相对设置,且上护罩与下护罩与左侧板、右侧板、后板构成装置外壳,所述上护罩与下护罩接合处开设有供收放缆机构缆线收放的开口;
所述后板与前板之间依次设有电机和收放缆机构,所述收放缆机构设于上护罩和下护罩之间,所述电机安装在底板上,且电机通过链条与收放缆机构传动连接;所述电机和收放缆机构间通过中板间隔,所述中板设有供链条通过的通孔;
所述左侧板与右侧板之间设有排缆器机构,所述排缆器机构通过螺钉固定在前板上,且排缆器机构平行于所述收放缆机构的轴向方向设置;
所述A架两端分别与上护罩与下护罩接合处相铰接,所述A架上焊接有尾滑轮和导向轮支架,所述导向轮机构设于A架中心线处导向轮支架上,所述导向轮机构为三个共线的导向轮,所述导向轮机构垂直于收放缆机构的轴向方向设置,所述尾滑轮设于A架上,且位于A架的中心线上。
所述缆线一端在所述收放缆机构上放缆后依次经所述排缆器机构、导向轮机构、尾滑轮垂直进入水面;
所述导向轮机构上设有检测收放缆速度的编码器以及缆绳的张力的张力传感器,所述张力传感器和编码器均与电控柜连接。
所述收放缆机构包括,制动器、滚筒、滚筒轴、滚筒支座、离合器、刹车片和啮合大齿轮;
其中,所述滚筒轴穿过滚筒,带动滚筒旋转,所述滚筒支座通过螺钉固定在中板与排缆器机构外壳上,所述滚筒转动设置于所述滚筒支座上;所述滚筒轴一端设有离合器,滚筒轴另一端与制动器键连接,制动器通过螺栓与左侧板设置的轴承座连接,离合器一端通过螺栓与设于右侧板轴承座固连,所述电机的输出轴与离合器通过链条齿轮啮合实现传动连接;
所述滚筒上安装有刹车片,碟刹套装固定在右侧板内壁上,手动刹车时,碟刹套装对刹车片施加摩擦力实现减速停止;所述滚筒上设有啮合大齿轮,所述应急手摇机构穿过右侧板内壁与滚筒上的啮合大齿轮传动连接。
还包括应急回收机构,用于出现故障进行应急回收缆线,所述应急回收机构包括,啮合小齿轮、锁止螺母、手摇套筒以及手摇把手;所述手摇套筒通过手摇套筒固定孔安装在右侧板内壁上;所述手摇套筒内设有轴承,所述套筒轴通过轴承与套筒轴转动连接,使在套筒轴在手摇套筒内转动;所述套筒轴与右侧板连接处适配有手摇把手,套筒轴另一端与啮合小齿轮相固连,所述啮合小齿轮与啮合大齿轮相啮合转动设置;所述手摇套筒内设有锁紧螺母,以防止啮合小齿轮受到外力转动。所述排缆器机构包括,排缆轮、排缆轮支架、排缆器支座和步进电机;
所述排缆器支座包括平行设置的丝杠和光杠,以及套装在所述丝杠和光杠上的滑块,所述滑块可沿丝杠的轴向移动;所述排缆器支座上设有限制滑块运动极限位置的限位传感器;
所述排缆轮为圆柱体,排缆轮设有多个,所述排缆轮均可转动设置在所述排缆轮支架上,所述排缆轮沿垂直于运动方向对称布设在排缆轮支架上,所述排缆轮支架安装在滑块上,随滑块沿丝杠的轴向运动,步进电机通过联轴器与所述丝杠一端连接。
所述制动器选用磁粉制动器。
所述电控箱包括PLC和控制电路;所述控制电路包括经开关SW1、熔断器连接的电机控制电路、PLC控制电路及电源指示灯;所述PLC控制电路与张力传感器和编码器连接;
所述电机控制电路输入端接入220V交流电源,输出端与电机和排缆器机构的步进电机连接;
所述PLC控制电路输入端接入220V交流电源,输出端与PLC连接;
所述电机控制电路,包括顺序连接的开关SW2、交流接触器KM1、开关电源,以及与开关电源连接的直流调速器和驱动器;所述直流调速器与电机连接,驱动器与排缆器机构的步进电机连接;
所述PLC控制电路,包括顺序连接的开关SW3、开关电源2;所述开关电源2与PLC连接。
所述开关SW3与开关电源2之间并联有制动器控制电路,所述制动器控制电路包括顺序连接的熔断器FU3、瞬时接触继电器KA1、磁粉制动器控制器,所述熔断器FU3与开关电源2输入端连接,磁粉制动器控制器与磁粉制动器的线圈连接;
所述开关电源2与PLC之间连有离合器控制电路,所述离合器控制电路包括顺次连接的熔断器FU4、瞬时接触继电器KA2,所述熔断器FU4与开关电源2输出端连接,瞬时接触继电器KA2与离合器的线圈连接。
一种走航式温盐深剖面测量仪器收放装置的收放方法,包括以下步骤:
1)将动力缆与船舶AC22OV电源进行相连,在PLC设置目标参数、缆长、张力、速度的参数后,启动自重放缆,开关SW1,SW2,SW3处于闭合状态,KA1,KA2均处于断开状态,KM1处于闭合状态,探头在自身重力作用下拖动滚筒进行自重放缆,绞车布放探头;
当排缆器位置需要调整时,通过PLC控制排缆器机构(7)的步进电机正转或反转,进而实现排缆器支架的在丝杠轴向方向的水平平移;
2)当缆线探头到达目标深度,启动自动放缆,此时SW1,SW2,SW3闭合,KA1断开,KA2,KM1处于闭合状态,PLC根据设定指令,控制电机与滚筒处于联动状态,根据PLC控制磁粉制动器控制器实现电动刹车以及调节电动刹车快慢,进而实现设定要求的速度;
3)探测完成后进行收缆,PLC控制电机与滚筒处于联动状态,SW1,SW2,SW3处于闭合状态,KA1均处于断开状态,KA2,KM1处于闭合状态,PLC根据手动收缆指令控制电机与滚筒处于联动状态,根据PLC设定的速度进行收缆和排缆器排缆,完成整个步骤,若出现故障时,则采用应急回收机构进行收缆。
所述采用应急回收机构进行收缆的步骤具体为:
a)用一个平口螺丝刀或硬币打开绞车手动应急回收端盖,并旋开应急回收机构的开锁紧螺母;
b)将手摇把手插入回收孔内,内层通过啮合小齿轮与滚筒上的啮合大齿轮进行啮合,使手摇把手与绞车滚筒处于同步状态;
c)放下手动制动器,手动转动手摇把手进行收缆作业。
本发明具有以下有益效果及优点:
本发明具有结构轻便小巧,操作简单灵活,系统工作稳定,耐腐蚀性强,本发明可以船舶走航时进行温盐深剖面测量设备的布放和回收,升级改造后可以在无人船上进行走航式温盐深剖面测量设备的布放和回收。
附图说明
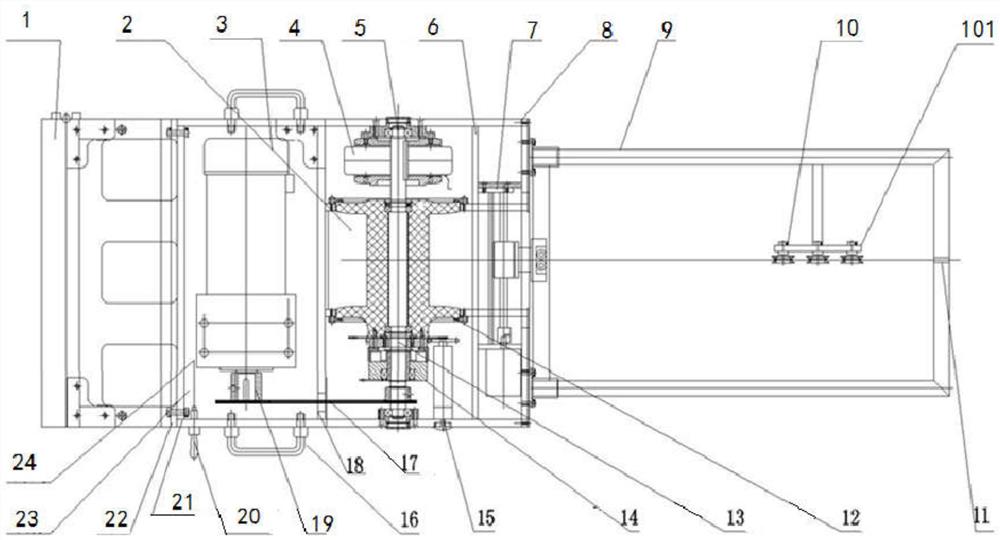
图1为本发明的总装侧视图;
图2为本发明的总装平面图;
图3为本发明的应急手摇装置结构示意图;
图4为本发明的排缆器机构结构示意图;
图5为本发明的电控柜电控原理图;
图6为本发明的碟刹套装结构示意图。
其中:1为电控柜、2为收放缆机构、3为电机、4为制动器、5为滚筒轴、6为前板、7为排缆器机构、701为丝杠、702为滑块、703为光杠、704为联轴器、705为排缆器支座固定孔、706为排缆器支座、707为限位传感器安装孔、708为排缆轮支架、709为排缆轮、710为限位传感器、711为步进电机、8为左侧板,9为A架,10为张力传感器、101为编码器、11为尾滑轮、12为滚筒、13为手刹装置,14为离合器、15为应急手摇机构、16为把手、17为链条、18为中板、19为齿轮、20为手刹把手、21为右侧板、22为后板、23为底板、24为手刹线、25为上护罩、26为下护罩、27为啮合齿轮、28为锁止螺栓、29为手摇套筒、30为手摇把手、31为密封盖、32为碟刹片、33为啮合大齿轮、34为套筒轴、35为轴承、1301为手刹底座、1302为刹车线紧固架、1303为刹车片间隙调整旋钮、1304为紧固架固定螺栓、1305为穿绳销。
具体实施方式
下面结合附图及实施例对本发明做进一步的详细说明。
机架采用316L不锈钢板、6061铝板,保证设备强度的基础上,提高设备的抗腐蚀能力。机架基座采用螺纹固定,作业时可以将基座固定在“科学”号及任意船只的船尾。
滚筒12采用316L不锈钢材质,在保证强度的基础上,减轻设备的重量,及抗腐蚀的能力。
排缆器机构7采用丝杠驱动,通过同步带或链条连接滚筒轴5(或单独直流电机3驱动)。
滚筒12缆绳张紧通过离合器14来实现,离合器14为电磁离合器,当下放探头时,电磁离合器打开,探头处于回收状态时电磁离合器闭合。
传动装置选用链条传动。
电控柜1及显示器,该系统可以实现PLC控制,显示器采用触摸屏。
如图1~图2所示,本发明包括电控柜1、底板23、电机3、中板18、左侧板8、右侧板21、后板22、收放缆机构2、前板6、排缆器机构7、A架9、张力传感器10、编码器101、尾滑轮11、上护罩25和下护罩26;
其中,电控柜1安装在底板23顶面一侧,电控柜1与后板通过螺栓连接;电控柜1通过电缆线分别与电机3、收放缆机构2以及排缆器机构7连接;
上护罩25与下护罩26相对设置,且上护罩25与下护罩26与左侧板8、右侧板21、后板22构成装置外壳,上护罩25与下护罩26接合处开设有供收放缆机构2缆线收放的开口;
后板22与前板6之间依次设有电机3和收放缆机构2,所述收放缆机构2设于上护罩25和下护罩26之间,电机3安装在底板23上,且电机3通过链条17与收放缆机构2传动连接;电机3和收放缆机构2间通过中板(18)间隔,中板18设有供链条17通过的通孔;
左侧板8与右侧板21之间设有排缆器机构7,排缆器机构7通过螺钉固定在前板6上,且排缆器机构7平行于所述收放缆机构2的轴向方向设置;
所述A架9两端分别与上护罩25与下护罩26接合处相铰接,所述A架9上焊接有尾滑轮11和导向轮支架,所述导向轮机构设于A架中心线处导向轮支架上,所述导向轮机构为三个共线的导向轮,所述导向轮机构垂直于收放缆机构2的轴向方向设置,所述尾滑轮11设于A架9上,且位于A架的中心线上。
缆线一端在所述收放缆机构2上放缆后依次经所述排缆器机构7、导向轮机构、尾滑轮11垂直进入水面;
导向轮机构上设有检测收放缆速度的编码器101以及缆绳的张力的张力传感器10,张力传感器10和编码器101均与电控柜1连接。
收放缆机构2包括,制动器4、滚筒12、滚筒轴5、滚筒支座、离合器14、刹车片32和啮合大齿轮33;
其中,滚筒轴5穿过滚筒12,带动滚筒12旋转,所述滚筒支座通过螺钉固定在中板18与排缆器机构7外壳上,滚筒12转动设置于所述滚筒支座上;所述滚筒轴5一端设有离合器14,滚筒轴5另一端与制动器4键连接,制动器4通过螺栓与左侧板8设置的轴承座连接,离合器14一端通过螺栓与设于右侧板21轴承座固连,电机3的输出轴与离合器14通过链条齿轮啮合实现传动连接;
滚筒12上安装有刹车片32,碟刹套装13固定在右侧板21内壁上,手动刹车时,碟刹套装13对刹车片32施加摩擦力实现减速停止;滚筒12上设有啮合大齿轮33,应急手摇机构穿过右侧板21内壁与滚筒12上的啮合大齿轮33传动连接。
如图3所示,为本发明的应急手摇装置结构示意图,应急手摇机构15通过螺栓与右侧板21相连,应急手摇机构15在系统出现电气故障时可以进行应急回收。啮合小齿轮27、锁止螺栓28、手摇套筒29、手摇把手30、密封盖31、共同组成应急手摇机构,打开密封盖31,将锁止螺栓28打开,手摇把手外六角与手摇套筒29内六角杆结合后推动拟合小齿轮到达工作位置,将啮合大齿轮33与啮合小齿轮27进行拟合,摇动手摇把手,实现滚筒12的旋转,进而实现缆绳的回收。齿轮29、链条17共同组成本发明的传动机构。
如图4所示,为本发明排缆器机构结构示意图,所述排缆器机构7包括,排缆轮709、排缆轮支架708、排缆器支座706和步进电机711;
排缆器支座706包括平行设置的丝杠701和光杠703,以及套装在丝杠701和光杠703上的滑块702,滑块702可沿丝杠701的轴向移动;排缆器支座(706)上设有限制滑块(702)运动极限位置的限位传感器710;
排缆轮709为圆柱体,排缆轮709设有多个,排缆轮709均可转动设置在所述排缆轮支架708上,排缆轮709沿垂直于运动方向对称布设在排缆轮支架708上,排缆轮支架708安装在滑块702上,随滑块沿丝杠701的轴向运动,步进电机711通过联轴器704与所述丝杠701一端连接。
如图6所示,为碟刹套装结构示意图,碟刹套装,用于启动手动刹车;碟刹套装包括,手刹把手、手刹线、手刹底座以及安装在手刹底座上的刹车线紧固架、刹车片间隙调整旋钮、紧固架固定螺栓和穿绳销;
其中,手刹底座通过螺栓固定在右侧板内壁上;手刹把手设于右侧板外壁上,手刹线一端连有手刹把手,手刹把手可拉动手刹线移动,手刹线另一端穿过穿绳销与刹车线紧固架连接,所述紧固架一端设有刹车片间隙调整旋钮,紧固架推动刹车片间隙调整旋钮沿滚筒轴的轴向方向向碟刹片移动,进而使刹车片与碟刹片相接触摩擦。
本发明制动器4、滚筒轴5、A架9、尾滑轮11、滚筒12、离合器14、应急手摇机构15、把手16、链条17、齿轮19、手刹把手20、底板23、手刹线24均可采用316L不锈钢材料制成,可以满足系统强度、耐腐蚀需求。
本发明前板6、排缆器机构7、左侧板8、手刹装置13、中板18、右侧板21、后板22均可采用6061铝合金材料,既能满足强度需求,也能满足防腐需求。
本发明的电控柜1采用PVC材料,防护等级IP56,本发明的垫脚采用PA66尼龙材料。
本发明的动作过程:当自由轮/联动开关在自由轮位置,操控面板自由轮指示灯点亮,本发明在自由状态布放探头;此时如果排缆器位置需要调整,可以通过点动排缆器左或排缆器右来实现左右方向的排缆器移动,在排缆器移动的过程中操控面板上的排缆器左移指示灯或排缆器右移指示灯会进行对应点亮。当探头下放到达目标深度,操作者可以通过手动刹车手柄进行绞车刹车,也可以通过刹车旋钮来实现电动刹车。需要收缆时,将自由轮/联动开关处于联动位置,此时电机与滚筒处于联动状态。收缆前检查刹车旋钮或手动刹车手柄是否处于初始位置,如果没有处于动作状态,进行复位后再进行绞车收缆作业。开始收缆时,将电位器旋扭旋转到速度较小的位置,此时将操作面板停止/启动旋钮旋转到启动位置,绞车会按照电位器旋钮设定的速度进行收缆,需要增大收缆速度时,将电位器旋钮顺时针方向进行旋转,收缆速度会对应提高。探头即将出水时将电位器旋钮逆时针方向进行减速,需要停止时将停止/启动开关打到停止位置。如果需要本发明进行联动放缆时,将操控面板收缆/放缆换向开关打到放缆位置,此时可以进行放缆。
排缆器在缆绳收缆或者放缆时都会进行自动排缆,如果出现排缆方向如实际需要运行方向反向时需要将本发明暂时停下来,将触摸屏参数曲线及修正界面中排缆器方向修正按钮点一下即可,然后进行启动后方向会得到调整。
如图5所示,为本发明的电控原理图,电控箱包括PLC和控制电路;控制电路包括经开关SW1、熔断器连接的电机控制电路、PLC控制电路及电源指示灯;
电机控制电路输入端接入220V交流电源,输出端与电机(3)和排缆器机构7的步进电机连接;
所述PLC控制电路输入端接入220V交流电源,输出端与PLC连接;
所述电机控制电路,包括顺序连接的开关SW2、交流接触器KM1、开关电源1,以及与开关电源1连接的直流调速器和驱动器;所述直流调速器与电机(3)连接,驱动器与排缆器机构1的步进电机连接;
所述PLC控制电路,包括顺序连接的开关SW3、开关电源2;所述开关电源2与PLC连接。
开关SW3与开关电源2之间并联有制动器控制电路,所述制动器控制电路包括顺序连接的熔断器FU3、瞬时接触继电器KA1、磁粉制动器控制器,所述熔断器FU3与开关电源2输入端连接,磁粉制动器控制器与磁粉制动器的线圈连接;
所述开关电源2与PLC之间连有离合器控制电路,所述离合器控制电路包括顺次连接的熔断器FU4、瞬时接触继电器KA2,所述熔断器FU4与开关电源2输出端连接,瞬时接触继电器KA2与离合器的线圈连接。
操控面板磁粉制动器旋钮可以用来调节电动刹车的反应快慢,可以缓冲电动刹车对缆绳及探头的冲击。
如果需要自动模式进行作业时,在操控面板上选择自动控制模式,提前设置好初始工作水深,目标水深,系统将在自由轮状态下进行布放探头,当探头到达目标水深时间隔一段时间后进行缆绳回收,回收至初始水深时开始自由轮放缆。整个剖面测量完成以后可以将探头回收至甲板,整个作业结束。
系统断电或出现故障无法正常回收缆绳时可以通过应急手摇机构进行手动回收缆绳及探头。
操作步骤:步骤一,静态剖面模式,静态投放需要船舶处于静止状态。进行静态投放最简单的方法是将本发明打到自由轮状态,直到达到目标深度,然后进行收缆。对于同一深度剖面,这种情况下完成一个站点花费的时间会少于带有采水器投放的时间。
步骤二,拖曳投放模式,对于300m的浅水剖面,或者更浅的剖面,船速不超过10kt是非常有效的。和静态剖面模式一样,在此模式下将本发明打到自由轮状态,剖面到预设的时间后结束,之后每次回收缆绳时不需每次都完全回收。同自由投放相比,此模式具有更高的空间采样频率。
步骤三,自由轮投放模式,在这种模式下探头的下降速度与船只运动相对分离,船速,剖面深度,下放时间三者有一个近似的平衡关系。此模式的不同之处是为了达到希望的剖面深度,应尽量控制船速在合理的范围,当探头投放后,缆绳从滚筒中释放。
工作原理:
通过触摸屏来实现绞车相关参数(缆长、张力、速度,当前状态等)的显示及修改功能。触摸屏通过通讯传输线与PLC相连,实现触摸屏对PLC内部参数的修改及控制功能。通过手柄控制PLC动作,进而控制直流电机正反转,实现该装置收放缆功能。通过传感器采集该装置收放缆速度,缆绳的张力,当前的实际位置等一些模拟量、数字量参数,通过模拟量数字量转换模块,将对应参数统一转换为PLC可以识别的数字量信号,为该装置提供可靠依据,便于控制。UCTD工作时,船速可以控制在10-12kn,设置到自由轮状态,这时该装置制动器失电,离合器失电,电机轴与滚筒输入轴分离,电机处于失电状态,将探头放入水中,在探头自重作用下,本发明处于自动放缆状态,当探头达到预先设置的水深时,绞车制动器上电,绞车电机上电,制动器与电机同时处于工作状态,将该装置逐步停止。一个剖面数据测量完成以后,操作绞车手柄处于收缆状态,或者通过绞车自动控制模式自行进行收缆。将探头回收至甲板以后,本次测量工作结束。
- 一种走航式温盐深剖面测量仪器收放装置及收放方法
- 一种走航式温盐深剖面测量仪器收放装置