基于知识图谱和Conv1D-LSTM-D的道路交通拥堵传播预测方法
文献发布时间:2023-06-19 10:19:37
技术领域
本发明属于交通预测领域,涉及一种基于知识图谱和Conv1D-LSTM-D的道路交通拥堵传播预测方法。
背景技术
近年来,道路交通需求的增加造成了严重的拥堵、延误和环境问题,尤其是在大城市。交通拥挤不仅影响社会中各类交通使用者、降低社会经济效率,还会产生很多其他的负面影响。随着科学技术的不断进步,“以智缓堵”将是未来治理交通拥堵问题的趋势。不断提高的交通信息采集质量和精度为实时准确地从交通网络中获取交通数据提供了保障,也为交通实时分析和预测研究提供了基础支持。因此,利用科学有效合理的智能方法为交通路网数据构建模型,对缓解城市道路拥堵有着重要的研究意义。
传统的交通拥堵预测方案难以解决交通流数据结果庞大且复杂的问题,因此急需一种新的交通拥堵解决方案。知识图谱的兴起为从大量复杂数据中进行关系的识别、发现和推断提供了可能。但由于交通领域数据的特殊性,目前知识图谱应用于交通的案例十分少见。
发明内容
为了克服现有技术的不足,本发明提供一种基于知识图谱和Conv1D-LSTM-D的道路交通拥堵传播预测方法,该方法基于知识图谱对道路交通流数据之间的复杂关系进行充分挖掘和规范表达,并基于Conv1D-LSTM-D实现了道路交通拥堵的传播预测,提高了道路交通拥堵预测的准确性。
本发明解决其技术问题所采用的技术方案是:
一种基于知识图谱和Conv1D-LSTM-D的道路交通拥堵传播预测方法,包括以下步骤:
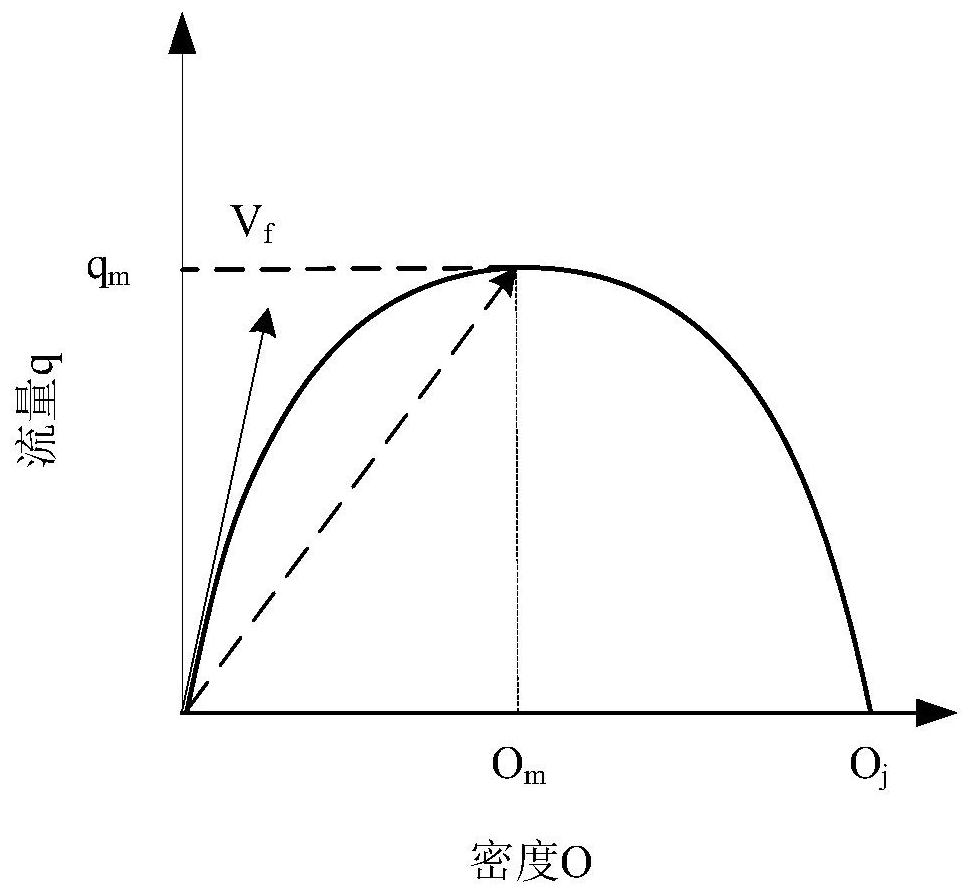
1)根据道路交通流数据集获取车道临界交通流状态阈值:针对数据集中各个车道的交通流数据,基于宏观基本图的原理用函数拟合车道的流量-密度散点图,得到各个车道的临界交通流状态阈值;
2)构建交通拥堵传播时间知识图谱:定义时间知识图谱的四元组集合,根据地理位置信息、交通流数据集和各个车道的临界交通流状态阈值,构建交通拥堵传播时间知识图谱;
3)基于时间知识图谱和Conv1D-LSTM-D实现道路交通拥堵传播预测:根据时间知识图谱转化获得时间序列的交通状态向量,通过一维卷积层Conv1D和全局最大池化层GlobalMaxPooling来对输入的交通状态向量进行低维特征的提取;并将其作为LSTM层的输入,学习时序特征,预测下一时刻的交通状态;最终通过解码层将预测完的低维特征向量重新映射回高维空间,实现道路交通拥堵传播预测。
进一步,所述步骤1)的过程为:
根据道路宏观基本图中的流量(q)-密度(o)模型,q
其中,v
针对各个车道,分别从道路交通流数据集中获取同一车道在不同时刻的交通流量数据和交通流密度数据,并绘制车道的流量-密度散点图,用抛物线进行拟合,得到各个车道的临界交通流状态阈值(q
再进一步,所述步骤2)中,构建交通拥堵传播时间知识图谱的过程如下:
2.1)定义时间知识图谱四元组集合
定义时间知识图谱四元组集合,描述如下:
四元组Ⅰ:交叉口-相邻-交叉口,描述的是t时刻下两个交叉口是否相邻;
四元组Ⅱ/四元组Ⅲ:车道-拥堵/不拥堵-交叉口,描述的是t时刻下某个交叉口的某个车道是否拥堵,拥堵状态通过临界交通流状态阈值判断;
2.2)构建交通拥堵传播时间知识图谱
根据地理位置信息判断交叉口之间的连接关系,构建各个时刻t的四元组Ⅰ;将不同时刻各个车道的交通流数据和临界交通流状态阈值进行比较,判断车道在各个时刻t下的拥堵状态,构建四元组Ⅱ和四元组Ⅲ,当q>q
更进一步,所述步骤3)中,基于时间知识图谱和Conv1D-LSTM-D实现道路交通拥堵传播预测过程如下:
3.1)基于Conv1D和GlobalMaxPooling层提取时序交通状态向量的低维特征;
根据交通拥堵传播时间知识图谱,获取时间序列交通状态向量,每个向量都代表一个时刻所有车道的状态,其中用1表示车道通畅,0表示车道拥堵,然后将时间序列交通状态向量输入到1层Conv1D和1层GlobalMaxPooling中,进行低维特征的提取;
3.2)基于LSTM层学习时序交通状态向量的时间特征
将上一步提取到的低维特征作为LSTM层的输入,学习时序特征,用以预测下一时刻的交通状态,LSTM内部其实有4个前馈神经网络,组成了LSTM记忆单元的遗忘门、输入门和输出门结构,遗忘门决定了记忆单元是否忘记历史信息,输入门决定了当前输入数据对记忆单元状态的影响,输出门决定了记忆单元的输出信息,假设x
首先由遗忘门决定保留过去历史信息的程度f
f
然后,由输入门和f
i
最后,由输出门决定当前t时刻的输出h
o
h
其中,f
3.3)基于Decoder实现道路交通拥堵传播预测
将LSTM层预测输出的低维特征向量输入到解码层进行解码,将低维特征向量重新映射回高维空间,就得到了下一时刻的拥堵预测信息,实现了道路交通拥堵传播预测。
本发明基于知识图谱理念,对交通数据进行建模和挖掘,然后利用深度学习模型Conv1D-LSTM-D进行拥堵预测,为预测交通拥堵提供了一种新型的解决方案。
本发明的有益效果:通过结合知识图谱和Conv1D-LSTM-D模型的知识,提出了一种完整的道路交通拥堵预测解决方案。本发明通过构建时间知识图谱,实现了道路交通流数据的深入挖掘和规范表达,且基于Conv1D-LSTM-D模型提取了时序交通状态向量的低维特征和时间特征进行学习,进一步提高了道路交通拥堵传播预测的准确性。
道路交通拥堵传播预测是智慧交通的重要组成部分,因此本发明在一定程度上可以有效合理地为交通路网数据构建模型,对缓解城市道路拥堵有重要的研究意义。
附图说明
图1是宏观基本图的流量(q)-密度(o)模型示意图;
图2是时间知识图谱的四元组集合;
图3是Conv1D-LSTM-D深度学习模型结构图;
图4是LSTM模型组成结构图。
具体实施方式
下面结合附图对本发明作进一步描述。
参照图1~图4,一种基于知识图谱和Conv1D-LSTM-D的道路交通拥堵传播预测方法,包括以下步骤:
1)根据道路交通流数据集获取车道临界交通流状态阈值,过程如下:
根据道路宏观基本图中的流量(q)-密度(o)模型(如图1所示),q
其中,v
针对各个车道,分别从道路交通流数据集中获取同一车道在不同时刻的交通流量数据和交通流密度数据,并绘制车道的流量-密度散点图,用抛物线进行拟合,得到各个车道的临界交通流状态阈值(qm,o
2)构建交通拥堵传播时间知识图谱,过程如下:
2.1)定义时间知识图谱四元组集合
定义时间知识图谱四元组集合(如图2所示),描述如下:
四元组Ⅰ:交叉口-相邻-交叉口,描述的是t时刻下两个交叉口是否相邻;如交叉口61和交叉口62之间有路段连接,则两者可以表示成(交叉口61,相邻,交叉口62,t)的形式;
四元组Ⅱ:车道-拥堵-交叉口,描述的是t时刻下某个交叉口的某个车道是否拥堵,拥堵状态通过临界交通流状态阈值判断;如交叉口61的1号车道某个时刻处于拥堵状态,则可以表示成(车道1,拥堵,交叉口61,t)。反之,如果车道1不拥堵,则表示成四元组Ⅲ的形式:(车道1,不拥堵,交叉口61,t);
2.2)构建交通拥堵传播时间知识图谱
根据地理位置信息判断交叉口之间的连接关系,构建各个时刻t的四元组Ⅰ;将不同时刻各个车道的交通流数据和临界交通流状态阈值进行比较,判断车道在各个时刻t下的拥堵状态,当q>q
3)基于时间知识图谱和Conv1D-LSTM-D实现道路交通拥堵传播预测,过程如下:
3.1)基于Conv1D和GlobalMaxPooling层提取时序交通状态向量的低维特征;
根据交通拥堵传播时间知识图谱,获取时间序列交通状态向量,每个向量都代表一个时刻所有车道的状态,其中用1表示车道通畅,0表示车道拥堵,然后将时间序列交通状态向量输入到1层Conv1D和1层GlobalMaxPooling中,进行低维特征的提取;
3.2)基于LSTM层学习时序交通状态向量的时间特征
将上一步提取到的低维特征作为LSTM层的输入,学习时序特征,用以预测下一时刻的交通状态,LSTM内部其实有4个前馈神经网络,组成了LSTM记忆单元的遗忘门、输入门和输出门结构(如图4所示),遗忘门决定了记忆单元是否忘记历史信息,输入门决定了当前输入数据对记忆单元状态的影响,输出门决定了记忆单元的输出信息,假设x
首先由遗忘门决定保留过去历史信息的程度f
f
然后,由输入门和f
i
最后,由输出门决定当前t时刻的输出h
o
h
其中,f
3.3)基于Decoder实现道路交通拥堵传播预测
将LSTM层预测输出的低维特征向量输入到解码层进行解码,将低维特征向量重新映射回高维空间,就得到了下一时刻的拥堵预测信息,实现了道路交通拥堵传播预测。
实际实验中的数据,过程如下:
(1)选取实验数据
原始交通流数据集是杭州市2017年6月份共30天的SCATS线圈数据,采样间隔T为15min,从研究区域中选取了66个交叉口共648个车道的数据,每个车道分别有2880个交通流量数据和交通流密度数据。
交通拥堵传播时间知识图谱转化后得到2880个648维的时间序列交通状态向量,将其中前80%的交通状态向量作为训练验证集数据,进行模型参数训练和超参数选取,剩下20%的交通状态向量作为测试集数据,进行算法验证。
(2)参数确定
本实验结果均基于Tensorflow环境下实现的,使用keras完成整个实验模型的框架搭建。
在Conv1D-LSTM-D模型中,设置1层一维卷积层,卷积层的filter个数为20,大小为10;设置1层全局最大池化层(GlobalMaxPooling);设置2层LSTM,每层的输出大小均为20,采用tanh激活函数;设置2层解码层,输出大小分别为100和300,采用ReLU激活函数;最后设置1层全连接层,输出单元数量为648,采用Sigmoid激活函数。模型训练迭代次数为500,每次迭代训练时的批次大小为128,采用Adam优化训练模型参数。
(3)实验结果
本发明实验的目的是进行车道的拥堵预测,由于实验数据中车道通畅时刻远多于拥堵时刻导致的不平衡,所以在判断预测输出是否拥堵时采用比0.5更大的阈值进行对比实验,并采用给予真实值为0的误差更大权重的
其中,y
所有道路交通拥堵传播预测实验的结果统计如表1所示,表1为不同权重和阈值条件下使用Conv1d-LSTM-D模型进行拥堵预测的结果:
表1。
本说明书的实施例所述的内容仅仅是对发明构思的实现形式的列举,仅作说明用途。本发明的保护范围不应当被视为仅限于本实施例所陈述的具体形式,本发明的保护范围也及于本领域的普通技术人员根据本发明构思所能想到的等同技术手段。
- 基于知识图谱和Conv1D-LSTM-D的道路交通拥堵传播预测方法
- 一种基于SAE-LSTM-SAD的道路交通拥堵传播预测方法