用于植保无人机的高时间分辨率、广视角的线状激光雷达
文献发布时间:2023-06-19 10:24:22
技术领域
本发明涉及激光遥感领域,尤其涉及一种用于植保无人机的高时间分辨率、广视角的线状激光雷达。
背景技术
植保无人机,是用于农林植物保护作业的无人驾驶飞机。具有作业高度低,飘移少,可空中悬停,无需专用起降机场,旋翼产生的向下气流有助于增加雾流对作物的穿透性,防治效果高,远距离遥控操作,喷洒作业人员避免了暴露于农药的危险,提高了喷洒作业安全性等诸多优点。
中红外可调谐激光是一种脉冲宽度在皮秒(10
红外激光的波长范围为7.6-10μm,电磁波通过大气层较少被反射、吸收和散射,而那些透射率高的波段称为大气窗口,通常把太阳光透过大气层时透过率较高的光谱段称为大气窗口,在红外激光中1.5~1.9μm、2.4~2.5μm、3.5~5.5μm、8.0~10μm都处于大气窗口波段,受大气对电磁波散射和吸收等因素的影响较小,有利于遥感探测;水汽分子是红外辐射的主要吸收体。较强的水汽吸收带位于0.71~0.735μm(微米),0.81~0.84μm,0.89~0.99μm,1.07~1.20μm,1.3~1.5μm,1.7~2.0μm,2.4~3.3μm,4.8~8.0μm,植保无人机主要用于农林植物保护作业,农林植物均为碳水化合物,根据植物对水吸收波段激光的能量吸收状况可以有效探测农林植物生长和分布状态,以及环境的水汽含量。
目前,市场上常用的激光雷达的波长多为0.905μm、1.55μm和10.6μm,均为单一波长且无法调节,且多为连续激光,较脉冲激光相比,连续激光的探测精度更低。在植保无人机领域,植保无人机一重要应用为喷洒农药,在农药的喷洒过程,尚未有专门器械探测农药喷洒的范围和浓度,造成农药的不合理应用,一些农药把握不当,在喷施过程中会对农作物产生明显的药害,不能达到预期效果。在复杂天气,如大风天气状态下,现有植保无人机的飞防作业因无有效监测手段,预期作用区域与实际作用区域有较大偏移;对于一些不规则的地块,因探测手段的缺失,亦会产生严重的重复喷洒和漏喷现象。
本发明为了解决现有激光雷达探测精度低和缺少专门面向植保无人机飞防作业的激光雷达的问题,提出了用于植保无人机的高时间分辨率、广视角的线状激光雷达,其具有空间覆盖面积大、时空分辨率高、多功能(监测喷洒出农药的有效附着程度、探测)、高精度的优点。
发明内容
针对以上问题,本发明提出一种用于植保无人机的高时间分辨率、广视角的线状激光雷达。
为实现本发明的目的,提供一种用于植保无人机的高时间分辨率、广视角的线状激光雷达,包括:超快光源模块、线状整形模块、光电探测模块及信号处理模块;
所述超快光源模块包括一个或多个波长可调谐的中红外超快脉冲激光光源、分路器;所述线状整形模块包括隔离器、准直器、聚焦透镜、线性发生器;所述光电探测模块包括信号采集模块、多通道模数转换器、高速采集器;所述信号处理模块包括微控制处理器、上位机;
所述中红外超快脉冲激光光源输出激光经由光纤传输至分路器,分路器将激光均分为三等份,分别经由光纤传输至具有相同结构的线状整形模块,其中每一路激光经由光纤传输模块发送至隔离器,经由隔离器输出至准直器,经由准直器依次经过两个聚焦透镜进行光束聚焦,经由聚焦透镜至线性发生器,经由线性发生器,点状激光发散成线状激光,线状激光经由探测窗口至大气中,进行探测并产生回波信号,回波信号经由信号采集模块收集,收集后回波信号发送至模数转换模块,模数转换模块对接受信号进行处理,处理后发送至高速采集器,高速采集器实现对高速数字信号的接收和缓存处理,并将缓存的信号发送至微控制处理器,微控制处理器将信号发送至上位机进行计算处理。
所述中红外超快脉冲激光光源具有固体增益介质及可饱和吸收体。
所述超快光源模块,光源工作方式为脉冲激光,脉冲重复频率大于兆赫兹。
所述准直器,为光纤准直器,用于将光纤内的传输光转变成准直光。
所述线性整形器,为柱透镜,用于将点状光源发散成线性光源。
所述信号采集模块,由一个或多个光电探测器组成,呈环形分布,探测波长范围为1.8~3微米,由带有前置放大器的达通型雪崩二级管组成,具体参数为入射光功率5.0至5000微瓦,放大器电源电压±5.5至±12.5V,系统带宽大于1GHz。
所述多通道模数转换器,用于将对应输入电压信号转换为输出的数字信号,转换时间小于50ps,采样速率大于Gs/s。
所述高速采集器,具有处理器、存储器、多种I/O口和中断系统、定时器/计时器功能、串口模块,是一种高速数字信号处理设备,可达到1.5GHz以上的处理速度。
所述微控制处理器,是一种集成电路芯片,是采用超大规模集成电路技术把具有数据处理能力的中央处理器CPU、随机存储器RAM、只读存储器ROM、多种I/O口和中断系统、定时器/计数器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、A/D转换器等电路)集成到一块硅片上构成的一个小而完善的微型计算机系统;
所述信号处理模块可根据实时接收的控制信号和探测信号,调整中红外可调谐激光模块的出射激光强度和波长。
所述分路器,为1转3分路器,用于将一根光纤中传输的光能量按照既定的比例分配给三根光纤。
所述隔离器,为光纤隔离器,用于避免反射的激光进入光源。
所述聚焦透镜,为两个凸透镜。
所述微控制处理器,支持无线通讯,搭载模块可为蓝牙模块或WIFI模块。
所述上位机,为支持蓝牙或无线通讯的笔记本电脑。
所述中红外超快脉冲激光光源的输出端与柱透镜的输入端连接,点状激光经由柱透镜整形为线状激光并发射到大气中,激光与大气相互作用后的回波信号经由光电探测器阵列接收,光信号传递给处理芯片,处理芯片由对应接收信号发送控制信号至步进电机和滤波器,步进电机由控制信号控制柱透镜与入射激光光源的距离,滤波器由控制信号调整输出激光的波长,处理芯片根据实时的激光与大气作用的回波信号进行计算,得出目标距离激光雷达的距离和目标的运动轨迹。
激光雷达测距及对障碍物探测原理:
T
计算出射激光与被测物距离S,
S=c×(T
其中c为光速;T
(T
根绝回波信号时间差可计算出雷达测得障碍物距离无人机的有效距离,根据回波信号的有无,判断探测方向是否有障碍物。
据水吸收波段的激光在大气中的吸收效应测量水汽的浓度分布的原理:
根据红外光谱的Lambert-Beer定律,强度为I
I(v)=I
其中,σ(v)为气体分子的吸收截面,N为分子数密度。
因气体体积已知,腔内体积已知,分子数密度即气体浓度已知,
气体分子的吸收截面,可由上述公式计算而得。
根据对应的气体分子的吸收截面可确定气体种类。
本文所述的一种新型激光探测仪的激光光源为优良相干光源,发射的激光为脉冲激光,接收到的回波信号也为脉冲信号。
与现有技术相比,本发明具有以下有益效果为:
(1)广视角,本发明利用线性整形技术,构建了线形激光,探测视角远大于现有单线或多线激光雷达。单线激光雷达使用过程中多以扫描的形式进行探测采样,本发明所提出的激光雷达探测激光为线性,无需扫描,避免扫描所带来的振动及能量浪费。多线激光雷达的探测精度大幅度依赖于发射激光的数目,本发明提出的线性激光,在出射激光的线性区域内,均可形成有效探测,通过调整信号接收器的数目和分布密度可以有效进行高空间分辨率的探测。
(2)高精度,中红外超快激光的高重频特性决定的高脉冲频率(MHz),窄脉宽皮秒(10
(3)所述激光雷达采用光谱可调谐光源,提供了可用于植保无人机特殊用途的特殊激光波段,通过调节激光波段为大气窗口(低水吸收)波段,可用于浓雾天气下植保无人机探测,调节激光波段为水吸收波段,可用于植保无人机飞防作业下,喷洒农药浓度的检测。增强了植保无人机的飞防作业能力也保障了植保无人机在复杂天气下的工作。
附图说明
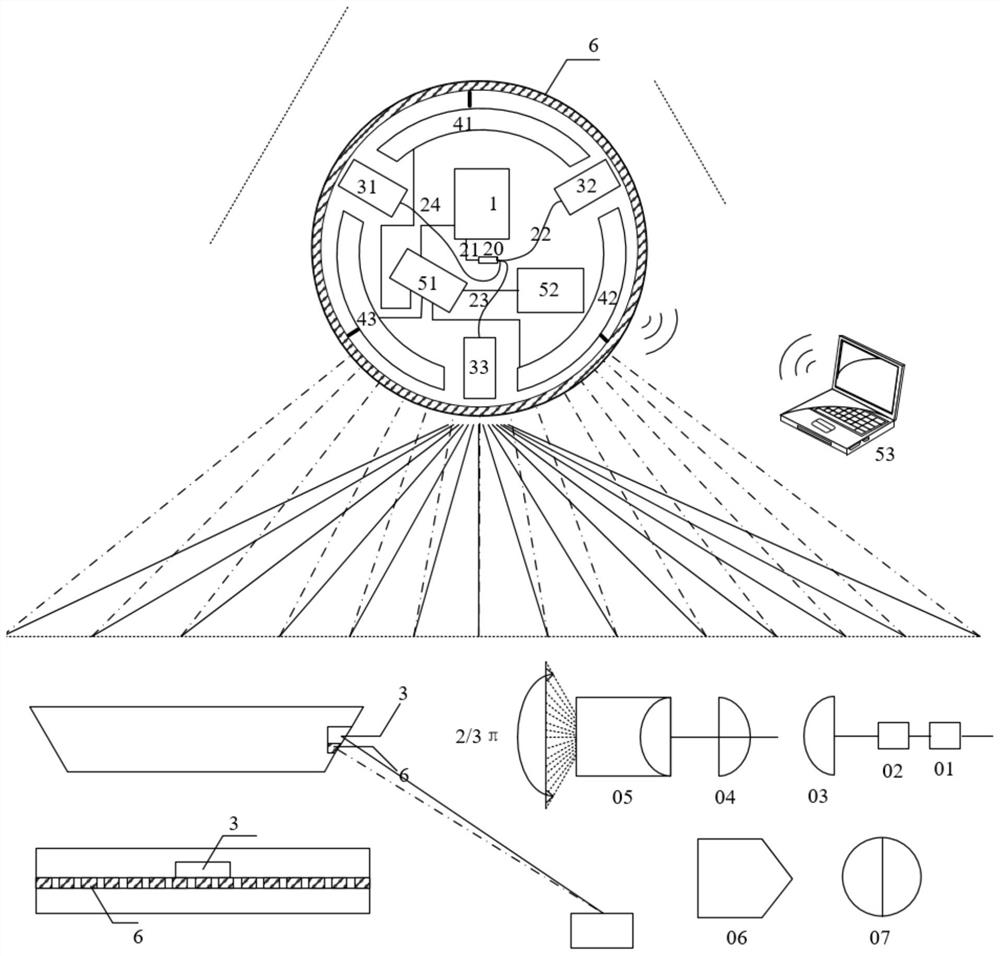
图1是一个实施例的用于植保无人机的高时间分辨率、广视角的线状激光雷达结构示意图;
图2是一个实施例的使用示意;(线状激光测物);
图3是一个实施例的使用示意图;(测量农药实际作用范围);
图4是一个实施例的水的红外吸收光谱。
具体实施方式
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明做进一步详细的说明。应当理解,此处描述的具体实施例仅仅用以解释本申请,并不限定本申请。
在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本申请的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相关的实施例,也不是与其它实施例互斥的独立的备选的实施例。本领域技术人员显式地和隐式的理解的是,本文描述的实施例可以与其它实施例相结合。
为使本发明的上述目的、特征优点能够更加明显易懂,下面结合附图和具体实施方式对本发明做进一步详细的说明。
实施例1基于本发明激光雷达用于植保无人机飞防作业。
一种用于植保无人机的高时间分辨率、广视角的线状激光雷达,结构如图1所示,包括中红外可调谐激光模块、线状整形模块、光电探测模块及信号处理模块。
使用示意图如图2所示。
中红外可调谐激光模块包括一个波长可调谐的中红外超快脉冲激光光源、分路器;所述线状整形模块包括隔离器、准直器、聚焦透镜、线性发生器;光电探测模块包括信号采集模块、多通道模数转换器、高速采集器;信号处理模块包括微控制处理器、上位机;
中红外超快脉冲激光光源1,半导体激光器,可调谐波长范围1.8~3μm,重频16.8MHz,脉宽14ps,工作电压12v,工作温度-40℃~+80℃的中红外光源;
分路器20,选用(2+1)*1氟化物光纤分路器,其中分路器的输入端端与半导体激光器尾纤采用机械拼接的方式连接;
分路器输入光纤21;
第一分路器输出光纤22;
第二分路器输出光纤23;
第三分路器输出光纤24;
隔离器01,光纤隔离器,工作波长1.8~3μm;
准直器02,光纤准直器,单模光纤准直器,工作波长1.8~3μm,通光孔径
第一聚焦透镜03,凸透镜,焦距为10mm;
第二聚焦透镜04,凸透镜,焦距为10mm;
线性发生器05,柱透镜,工作波长2.5μm,两面都有增透膜,工作温度为-40℃至93℃,如图1中05所示为侧视图、07所示为正视图,06所示为俯视图;
信号采集模块6,本实施例中信号采集模块由36个光电探测器组成,呈环形分布以10°成环形间隔分布,单个光电探测器,带有前置放大器的达通型雪崩二级管,对1.8微米至3微米波段的光灵敏度高,响应速度快,具体参数为入射光功率5.0至5000微瓦,另配放大器,放大器电源电压±5.5至±12.5V,系统带宽1.5GHz;
第一多通道模数转换器41,第二多通道模数转换器42,第三多通道模数转换器43,将对应输入电压信号转换为输出的数字信号,转换时间小于50ps,采样速率大于Gs/s;
高速采集器51,FPGA数字电路,选用芯片型号Virtex-II Pro;
微控制处理器52,STM32单片机,选用型号STM32F4,搭载蓝牙5.0模块理论有效可通信距离为300m,传输速度上限为24Mbps,放大模块的带宽为90MHz;
上位机53,为支持蓝牙5.0通信的笔记本电脑;
上位机53发送控制指令至微控制处理器52,微控制处理器控制中红外超快脉冲激光光源1输出激光波长为2.5μm,中红外超快脉冲激光光源1输出激光经由分路器输入光纤21传输至分路器20,分路器20将激光均分为三等份,分别传输至第一分路器输出光纤22、第二分路器输出光纤23、第三分路器输出光纤24,传输至具有相同结构的线状整形模块,其中每一路激光经由光纤传输发送至隔离器01,经由隔离器01输出至准直器02,经由准直器02依次经过第一聚焦透镜03、第二聚焦透镜04进行光束聚焦,经由聚焦透镜至线性发生器05,经由线性发生器05,点状激光发散成线状激光,线状激光经由探测窗口至大气中,进行探测并产生回波信号,回波信号经由信号采集模块6收集,收集回波信号并将对应光信号转换为模拟电信号,将模拟电信号发送至多通道模数转换模块6,第一多模数转换模块41、第二多模数转换模块42、第三多模数转换模块43对接受信号进行处理,将模拟电信号转换为数字信号,发送至高速采集器51,高速采集器51实现对高速数字信号的接收和缓存处理,并将缓存的信号发送至微控制处理器52,微控制处理器52将信号发送至上位机53进行计算处理。
T
计算出射激光与被测物距离S,
S=c×(T
其中c为光速;T
(T
根据回波信号时间差可计算出雷达测得障碍物距离无人机的有效距离,根据回波信号的有无,判断探测方向是否有障碍物。
实施例2基于本发明激光雷达用于植保无人机农药浓度探测。
一种用于植保无人机的高时间分辨率、广视角的线状激光雷达,结构如图1所示,包括中红外可调谐激光模块、线状整形模块、光电探测模块及信号处理模块。
使用示意如图3所示。
中红外可调谐激光模块包括一个波长可调谐的中红外超快脉冲激光光源、分路器;所述线状整形模块包括隔离器、准直器、聚焦透镜、线性发生器;光电探测模块包括信号采集模块、多通道模数转换器、高速采集器;信号处理模块包括微控制处理器、上位机;
中红外超快脉冲激光光源1,半导体激光器,可调谐波长范围1.8~3μm,重频16.8MHz,脉宽14ps,工作电压12v,工作温度-40℃~+80℃的中红外光源;
分路器20,选用(2+1)*1氟化物光纤分路器,其中分路器的输入端端与半导体激光器尾纤采用机械拼接的方式连接;
分路器输入光纤21;
第一分路器输出光纤22;
第二分路器输出光纤23;
第三分路器输出光纤24;
隔离器01,光纤隔离器,工作波长1.8~3μm;
准直器02,光纤准直器,单模光纤准直器,工作波长1.8~3μm,通光孔径
第一聚焦透镜03,凸透镜,焦距为10mm;
第二聚焦透镜04,凸透镜,焦距为10mm;
线性发生器05,柱透镜,工作波长2μm,两面都有增透膜,工作温度为-40℃至93℃,如图1中05所示为侧视图、07所示为正视图,06所示为俯视图;
信号采集模块6,本实施例中信号采集模块由36个光电探测器组成,呈环形分布以10°成环形间隔分布,单个光电探测器,带有前置放大器的达通型雪崩二级管,对1.8微米至3微米波段的光灵敏度高,响应速度快,具体参数为入射光功率5.0至5000微瓦,另配放大器,放大器电源电压±5.5至±12.5V,系统带宽1.5GHz;
第一多通道模数转换器41,第二多通道模数转换器42,第三多通道模数转换器43,将对应输入电压信号转换为输出的数字信号,转换时间小于50ps,采样速率大于Gs/s;
高速采集器51,FPGA数字电路,选用芯片型号Virtex-II Pro;
微控制处理器52,STM32单片机,选用型号STM32F4,搭载蓝牙5.0模块理论有效可通信距离为300m,传输速度上限为24Mbps,放大模块的带宽为90MHz;
上位机53,为支持蓝牙5.0通信的笔记本电脑;
第一农药喷洒区域100、第一农药喷洒区域101、第一农药喷洒区域102,不同农药浓度区域;
上位机53发送控制指令至微控制处理器52,微控制处理器控制中红外超快脉冲激光光源1输出激光波长为2.5μm,中红外超快脉冲激光光源1输出激光经由分路器输入光纤21传输至分路器20,分路器20将激光均分为三等份,分别传输至第一分路器输出光纤22、第二分路器输出光纤23、第三分路器输出光纤24,传输至具有相同结构的线状整形模块,其中每一路激光经由光纤传输发送至隔离器01,经由隔离器01输出至准直器02,经由准直器02依次经过第一聚焦透镜03、第二聚焦透镜04进行光束聚焦,经由聚焦透镜至线性发生器05,经由线性发生器05,点状激光发散成线状激光,线状激光经由探测窗口至大气中,对第一农药喷洒区域100、第一农药喷洒区域101、第一农药喷洒区域102进行探测并产生回波信号,回波信号经由信号采集模块6收集,收集回波信号并将对应光信号转换为模拟电信号,将模拟电信号发送至多通道模数转换模块6,第一多模数转换模块41、第二多模数转换模块42、第三多模数转换模块43对接受信号进行处理,将模拟电信号转换为数字信号,发送至高速采集器51,高速采集器51实现对高速数字信号的接收和缓存处理,并将缓存的信号发送至微控制处理器52,微控制处理器52将信号发送至上位机53进行计算处理。
T
计算出射激光与被测物距离S,
S=c×(T
其中c为光速;T
(T
水(气态)的红外吸收光谱如图4所示。
根据红外光谱的Lambert-Beer定律,强度为I0,频率为V的单色激光,通过长度为L的吸收介质后,在接收端测得的强度为I,则在接收端测得的强度I有:
I(v)=I
其中,σ(v)为气体分子的吸收截面,N为分子数密度。
所以,分子数密度N即气体浓度可得:
本发明通过调整激光器输出波长,短时间内依次输出波长不同的激光,其中一束激光波长为高水吸收波段,另一束为低水吸收波段,根据两次回波信号的强弱差,易得出该区域内农药的浓度分布。
需要说明的是,本申请实施例所涉及的术语“第一\第二\第三”仅仅是区别类似的对象,不代表针对对象的特定排序,可以理解地,“第一\第二\第三”在允许的情况下可以互换特定的顺序或先后次序。应该理解“第一\第二\第三”区分的对象在适当情况下可以互换,以使这里描述的本申请的实施例能够以除了在这里图示或描述的那些以外的顺序实施。
本申请实施例的术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或模块的过程、方法、装置、产品或设备没有限定于已列出的步骤或模块,而是可选地还包括没有列出的步骤或模块,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或模块。
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
- 用于植保无人机的高时间分辨率、广视角的线状激光雷达
- 用于在高通量筛选中以高时间分辨率进行测量的方法和系统