一种面向教育的多用途机器人夹具
文献发布时间:2023-06-19 10:30:40
技术领域
本发明涉及机器人自动化生产领域,具体是一种面向教育的多用途机器人夹具。
背景技术
目前随着我国工业机器人技术的不断发展,以及国内人工成本的增加和工业技术的转型升级,工业机器人技术在工业生产活动中越来越多的得到应用。机器人更加普遍地应用在工业自动化中。国内各高校在学生的实践教育上更加注重机器人的应用学习,陆续开设机器人的相关课程。工厂企业等对具有工业机器人操作与维护的专业技术人员的需求也不断的再增加,对工业机器人教学类设备的需求与日俱增,通过实践操作可以很好地培养相关人员的专业技术能力,为我国制造业的发展提供强有力的人才支撑。
目前市场上需要大量的工业机器人专机技术人才,工业机器人在工业生产中装配任务环节中有大量的应用,因此工业机器人装配工作站培训专用设备尤为重要。且现有的工业机器人培训设备结构都比较简单,设备内尽可能简化设计以便于对相关人员的培训,设备成本高,人力成本投入也高。
发明内容
为了解决上述问题,本发明提出一种面向教育的多用途机器人夹具。
一种面向教育的多用途机器人夹具,包括与机器人法兰连接的夹具连接件,还包括在夹具连接件的下面连接的Y形夹具安装板,所述的Y形夹具安装板上分别设置有三个工位一、工位二、工位三,在工位一、工位二、工位三上分别安装有气动夹爪、内外圈抓手、轴承保持架抓手。
所述的夹具连接件为方形柱体结构,四周侧面设置与Y形夹具安装板配合的凹槽。
所述的Y形夹具安装板设置为Y形等边对称结构,在Y形夹具安装板的末端分别设置有用于安装气动夹爪、内外圈抓手、轴承保持架抓手的安装孔。
所述的内外圈抓手为类矩形板状结构,内外圈抓手的底板安装有若干个用于吸附轴承且呈短圆柱体型的电磁铁抓手。
所述的电磁铁抓手设置有四个,分为两组,两组互相交叉,小间隔的一组抵紧轴承的内圈,大间隔的一组压紧轴承的外圈,四组电磁铁抓手共同作用抓紧轴承。
所述的内外圈抓手的底板设置有使电磁铁抓手进行移动的通道。
所述的轴承保持架抓手为矩形板状结构,轴承保持架抓手底板对称布置有若干个短圆柱体型的电磁铁一,对称布置的四个短圆柱体型的电磁铁一中设置有与轴承保持架相配合的铸件,铸件圆周底面设置有三个小的短圆柱体型的电磁铁二。
所述的Y形夹具安装板的工位一上固定连接有气缸安装块,在气缸安装块的前方设有一对夹爪,所述的夹爪通过夹爪安装棍与气缸安装块连接。
本发明的有益效果是:本发明是面向教育的多用途机器人夹具的实训设备,功能齐全,可以实现短期内专机人才的培养;装配轴承工件涵盖了装配过程的基本要素,实训效果好。
附图说明
下面结合附图和实施例对本发明进一步说明。
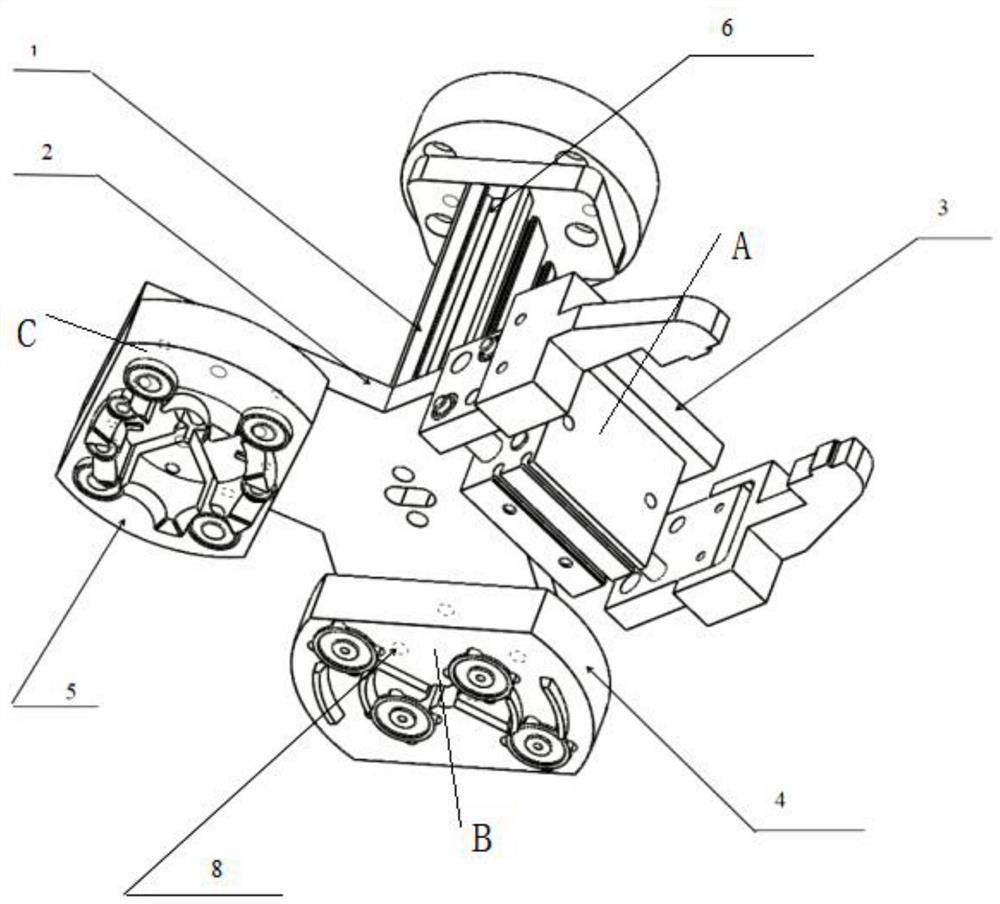
图1为本发明的立体结构示意图;
图2为本发明的装配夹具的内外圈抓手的平面示意图;
图3为本发明的装配夹具的轴承保持架抓手的平面示意图;
图4为本发明的装配夹具的气动夹爪的立体结构示意图;
图5为本发明的的轴承及轴承保持架平面结构示意图;
附图标记:1、夹具连接件;2、Y形夹具安装板;3、气动夹爪;31、气缸安装块;32、夹爪;33、夹爪安装棍;4、内外圈抓手;41、电磁铁抓手;42、通道;5、轴承保持架抓手;51、电磁铁一;52、电磁铁二;53、轴承保持架;6、凹槽;7、轴承;8、安装孔。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面对本发明进一步阐述。
如图1至图5所示,一种面向教育的多用途机器人夹具,包括与机器人法兰连接的夹具连接件1,还包括在夹具连接件1的下面连接的Y形夹具安装板2,所述的Y形夹具安装板2上分别设置有三个工位一A、工位二B、工位三C,在工位一A、工位二B、工位三C上分别安装有气动夹爪3、内外圈抓手4、轴承保持架抓手5。
所述的夹具连接件1为方形柱体结构,四周侧面设置与Y形夹具安装板2配合的凹槽6。
所述的Y形夹具安装板2设置为Y形等边对称结构,在Y形夹具安装板2的末端分别设置有用于安装气动夹爪3、内外圈抓手4、轴承保持架抓手5的安装孔8。
所述气动夹爪3通过安装孔8与Y形夹具安装板2配合安装。
所述内外圈抓手4通过安装孔8与Y形夹具安装板2配合安装。
所述轴承保持架抓手5通过安装孔8与Y形夹具安装板2配合安装。
所述的内外圈抓手4为矩形板状结构,内外圈抓手4的底板安装有若干个用于吸附轴承且呈短圆柱体型的电磁铁抓手41。
所述的电磁铁抓手41设置有四个,分为两组,两组互相交叉,小间隔的一组抵紧轴承的内圈,大间隔的一组压紧轴承的外圈,四组电磁铁抓手41共同作用抓紧轴承。
所述的内外圈抓手4的底板设置有使电磁铁抓手41进行移动的通道42。
所述的轴承保持架抓手5为类矩形板状结构,轴承保持架抓手5底板对称布置有若干个短圆柱体型的电磁铁一51,对称布置的四个短圆柱体型的电磁铁一51中设置有与轴承保持架相配合的铸件,铸件圆周底面设置有三个小的短圆柱体型的电磁铁二52。
所述的Y形夹具安装板2的工位一A上固定连接有气缸安装块31,在气缸安装块31的前方设有一对夹爪32,所述的夹爪32通过夹爪安装棍33与气缸安装块31连接。
本发明的使用方法:运行前准备,在调整好工业机器人末端姿态后,选择三个工位上的夹具对工件进行夹取,内外圈抓手4的底板安装的四个短圆柱体型的电磁铁抓手41吸附轴承7,小间隔的一组抵紧轴承7的内圈,大间隔的一组压紧轴承7的外圈,四个电磁铁抓手41共同作用抓紧轴承7,轴承保持架抓手5的底板的四个短圆柱体型电磁铁一51和三个小的短圆柱体型电磁铁二52共同作用以固定住轴承7及轴承保持架53,气动夹爪3通过一对夹爪32以夹紧物件。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种面向教育的多用途机器人夹具
- 一种面向教育机器人视觉理解的头部姿态估计方法及系统