车辆接触规避辅助系统
文献发布时间:2023-06-19 10:40:10
技术领域
本发明涉及一种车辆接触规避辅助系统,用于向车辆操作者提供辅助以规避位于自身车辆前方或邻近自身车辆的障碍物。
背景技术
当车辆操作者转动机动车辆的方向盘时,由于车辆操作者的手的角度位置的变化,施加至车辆操作者的手的载荷可能会增加。这可能会对驾驶舒适性产生不利影响。JP2007-253640A公开了一种缓解该问题的转向装置。该转向装置包括:检测装置(例如摄像头;设置在方向盘上的压电压力传感器;和转向角传感器),其检测车辆操作者的手在方向盘上的位置;以及转向控制单元,其控制施加至方向盘的转向反作用,使转向反作用随着转向角的增加而降低,并依赖于车辆操作者的手在方向盘上的位置。这种转向装置可以是线控转向的转向装置,或者可以是动力辅助转向装置。
近年来,对于接触规避辅助系统有一些提议,该系统使得车辆能够自动规避与位于车辆前方的障碍物的接触。在这样的系统中,控制单元通常干预车辆的转向和制动操作。因此,当接触规避辅助操作被启动时,方向盘不顾及车辆操作者的意图而被转动。
如果车辆操作者按照驾校中教导的适当方式握持方向盘,则车辆操作者能够应对通常在接触规避辅助操作启动时发生的方向盘的突然转动,并进行随后的转向操作,这将是保持车辆受控所需要的。然而,如果车辆操作者在这种时候没有以适当方式握持方向盘,则车辆操作者的手可能以不希望的方式张紧,并且/或接触规避辅助操作可能不会以预期的方式进行。
JP2007-253640A中公开的转向装置不能为该问题提供适当的补救措施。
发明内容
鉴于现有技术存在这样的问题,本发明的主要目的是提供一种车辆接触规避辅助系统,该系统能够辅助车辆操作者规避位于车辆前方或邻近车辆的障碍物,而不会对车辆操作者的手造成任何不当的张紧。
为了实现这样的目标,本发明提供了一种用于在规避位于自身车辆前方或与自身车辆相邻的障碍物中提供辅助的车辆接触规避辅助系统1,所述车辆接触规避辅助系统包括:转向装置5,所述转向装置包括转向执行器20,所述转向执行器用于根据施加至所述车辆的方向盘21的转向输入来使所述车辆的可转向轮18转向;障碍物获取单元10,所述障碍物获取单元构造成获取位于所述车辆前方的障碍物;接触规避控制单元15,所述接触规避控制单元构造成在由所述障碍物获取单元检测到位于所述车辆前方的障碍物时执行障碍物规避操作,所述障碍物规避操作包括经由所述转向执行器对所述可转向轮进行转向以规避所述障碍物;方向盘握持状态检测单元8,所述方向盘握持状态检测单元构造成检测车辆操作者对方向盘的握持状态;其中,所述接触规避控制单元构造成根据所检测到的握持状态对所述障碍物规避操作施加限制。
因而,能够进行障碍物规避操作,使得防止车辆操作者的手上的张紧或载荷变得过大。
优选地,所述限制包括限制所述转向执行器的转向扭矩。
从而,即使当车辆操作者可能以不适当的方式握持方向盘时,也能防止车辆操作者的手在障碍物规避操作中以高扭矩不适当地扭转。
优选地,所述限制包括限制所述转向执行器的转向角速度。
从而,防止车辆操作者的手在障碍物规避操作中经历过度的不适。
优选地,所述限制包括限制所述转向执行器的转向角。
从而,即使当车辆操作者可能以不适当的方式握持方向盘时,也能防止车辆操作者的手在障碍物规避操作中过度地扭转。
优选地,所述握持状态包括:所述车辆操作者用双手握持方向盘的双手握持状态;以及所述车辆操作者用单手握持方向盘的单手握持状态,在所述单手握持状态下由所述接触规避控制单元施加的所述限制比在所述双手握持状态下水平更高。
当车辆操作者用单手握持方向盘时,该手可能无法有利地适应方向盘的自动转动而不丧失对方向盘的握持和/或不经历一些张紧或不适。因此,有利的是,在单手握持状态的情况下比在双手握持状态的情况下更大程度地限制障碍物规避操作中方向盘的转动。
优选地,所述单手握持状态包括:所述车辆操作者仅用左手握持方向盘的左手握持状态;以及所述车辆操作者仅用右手握持方向盘的右手握持状态,在所述左手握持状态下由所述接触规避控制单元施加的所述限制在所述方向盘顺时针方向转动时比在所述方向盘逆时针方向转动时水平更高,在所述右手握持状态下由所述接触规避控制单元施加的所述限制在所述方向盘逆时针方向转动时比在所述方向盘顺时针方向转动时水平更高。
与沿对车辆操作者的手造成较小张紧的方向转动方向盘的情况相比,在沿对车辆操作者的手造成较大张紧的方向转动方向盘的情况下,通过这样增加由接触规避控制单元施加的限制,能够最大限度地执行接触规避操作而不会对车辆操作者握持方向盘的手造成不适当的张紧。
优选地,所述握持状态包括所述车辆操作者双手都不握持方向盘的双手都不握持状态,由所述接触规避控制单元在所述单手握持状态和所述双手握持状态下施加的所述限制比在所述双手都不握持状态下水平高。
当车辆操作者双手都不握持方向盘时,当车辆前方存在障碍物时,车辆操作者无法迅速采取任何行动。因此,在这种情况下,以最小的限制执行障碍物规避操作是非常必要的。(当限制是以对转向角和其他操作量值施加的限制值的形式时,较低的限制对应较高的限制值。)因此,通过布置成使得由接触规避控制单元在单手握持状态和双手握持状态下施加的限制比在双手都不握持状态下施加的限制的水平高,使得接触规避控制单元能够以最佳方式执行接触规避控制,而不会有使车辆操作者的手张紧的危险。
优选地,所述接触规避控制单元构造成当在紧接所述障碍物规避操作启动之前和/或在所述障碍物规避操作执行期间检测到所述单手握持状态时,经由所述方向盘向所述车辆操作者传输信号。
从而,鼓励车辆操作者在接触规避控制单元辅助的同时及时采取规避障碍物所需的行动。除了或代替方向盘的移动以外,这样的信号还可以在视觉、触觉和/或听觉上传输给车辆操作者。
优选地,要传输给所述车辆操作者的所述信号包括所述方向盘的周期性角运动。
从而,以直观的方式诱导车辆操作者对方向盘施加适当的转向输入。
优选地,所述方向盘的所述周期性角运动被执行成使得所述方向盘在规避所述障碍物时所述可转向轮的移动方向上的角速度大于所述方向盘在相反方向上的角速度。
通过经由方向盘的这种移动如此提示在规避障碍物中所需要的方向盘的转动方向,以直观的方式诱导车辆操作者沿正确的方向对方向盘施加适当的转向输入。
因此,本发明提供了一种车辆接触规避辅助系统,其能够在规避位于车辆前方或邻近车辆的障碍物中为车辆操作者提供辅助,而不会对车辆操作者的手造成任何不当的张紧。
附图说明
图1是配备有根据本发明的一个实施方式的车辆接触规避辅助系统的车辆的框图;
图2是车辆接触规避辅助系统的运动确定单元的框图;
图3是由车辆接触规避辅助系统的控制单元执行的车辆接触规避辅助处理的流程图;
图4是图3所示的驾驶辅助处理的流程图;以及
图5A至图5C是供应至转向马达的电流的时间图。
具体实施方式
下面参照附图描述根据本发明的一个实施方式的车辆接触规避辅助系统。
图1是配备有本发明的车辆接触规避辅助系统1的车辆2的框图。接触规避辅助系统1构造成控制车辆的移动,以规避与可能位于车辆2前方的障碍物的接触。在这种情况下,车辆2由四轮车辆构成,并且包括动力系统3、制动装置4、转向装置5、通知装置6、操作量传感器组7、握持状态检测传感器8、车辆状态检测传感器9、前方环境检测传感器10和后方环境检测传感器11、路面状态获取传感器12以及控制单元15。车辆2的这些系统部件经由诸如CAN(控制器区域网)之类的通信手段相互连接,以便能够在它们之间传输信号。
动力系统3向车辆2提供推进力,并且包括例如动力源和传输单元。动力源可以包括电动马达和诸如汽油机或柴油机之类的内燃机中的至少一种。动力系统3包括本身已知的推进力分配装置,该装置将产生的推进力分配至左轮和右轮。制动装置4构造成对车辆2施加制动力Fb,并且例如包括:四个卡钳16(制动卡钳),每个卡钳均构造成将一个垫片压在相应轮上设置的制动转子上;以及制动执行器17,其装配有向卡钳16提供液压的电致动缸。制动执行器17可以包括本身已知的制动力分配装置(例如VSA液压单元),该装置将制动装置4中产生的制动力Fb分配给四个卡钳16。制动装置4可以包括当车辆2静止时以本身已知的方式限制轮旋转的驻车制动装置。
转向装置5是用于改变转向角δ的装置,该转向角δ是可转向轮18(前轮)的转动量,并且该转向装置5例如包括:转向机构19,其主要由用于转动可转向轮18的齿条和小齿轮机构构成;以及转向马达20,其致动转向机构19。转向装置5可以是电动转向系统,其中方向盘21和转向机构19相互机械连接,并且转向马达20提供转向辅助扭矩。另选地,转向装置5可以是线控转向的转向装置,其中转向机构19和方向盘21在正常情况下彼此机械解耦。在线控转向的转向装置的情况下,转向装置5还包括转向反作用力马达22,该马达将转向反作用力施加至方向盘21。可转向轮18(通常由前轮构成)由转向马达20经由转向机构19响应于方向盘21的转动而转向,并将由转向反作用力马达22产生以便与可转向轮18的转向状态相对应的转向反作用力施加至方向盘21。方向盘21是转向输入构件,其接收由车辆操作者施加到其上的转向输入。
通知装置6是用于借助光、声音和/或振动来通知车辆操作者有关驾驶和车辆状况的信息的装置。例如,通知装置可以包括显示装置、设置在仪表板上的声音发射器以及设置在方向盘21或座椅上的振动装置。使方向盘21振动的振动装置可以由转向马达20或转向反作用力马达22构成,该转向反作用力马达22由控制单元15适当地致动。动力系统3、制动装置4、转向装置5和通知装置6由控制单元15控制。
操作量传感器组7是用于检测车辆操作者进行的各种操作量或各种操作的量的传感器组,并且可以包括加速踏板传感器23、制动传感器24、转向角传感器25和转向扭矩传感器26。加速踏板传感器23检测车辆操作者相对于加速踏板27进行的加速踏板下压量Ap(加速器开度)或驾驶操作量。加速踏板27是接收车辆操作者对动力系统3进行的驾驶操作的驾驶操作构件。制动传感器24是检测车辆操作者在制动踏板28上进行的制动踏板力Pb或制动操作量的制动操作量检测传感器,并且可以根据制动液压力检测。制动踏板28是接收车辆操作者在制动装置4上进行的制动操作的制动操作构件。转向角传感器25检测转向角θs或方向盘21的转向角。转向扭矩传感器26检测施加至方向盘21的转向扭矩Ts。
握持状态检测传感器8是用于检测车辆操作者相对于方向盘21的握持状态的传感器,并且例如可以包括在车辆内部在车辆操作者前方设置的摄像头,以检测车辆操作者的手握持方向盘21的位置和角度。握持状态检测传感器8可以另选或另外包括设置在方向盘21上的压电传感器,以检测由车辆操作者的手对其施加的压力。通常,多个压电传感器元件沿方向盘21的圆周布置,以便可以检测车辆操作者握持方向盘21的位置。
车辆状态检测传感器9包括:检测车辆2的速度的车辆速度传感器;以及检测车辆2绕竖直轴的角速率的偏航率传感器。偏航率传感器可以由陀螺仪传感器组成。车辆状态检测传感器9还可以包括:检测车辆2的前后加速度的加速度传感器;检测车辆2的前进方向的方向传感器;以及其他传感器。
前方环境检测传感器10是相对位置获取传感器,其检测车辆2前方的诸如障碍物之类的物体,并获取车辆2与障碍物之间的相对位置。后方环境检测传感器11是这样的装置,其检测车辆2后侧的诸如障碍物之类的物体,并获取车辆2与障碍物之间的相对位置。前方环境检测传感器10和后方环境检测传感器11可以由诸如雷达、激光雷达和摄像头之类的传感器组成,这些传感器可以捕获来自外部物体的电磁波或光。这些传感器可以构造成从传感器发射信号,并接收从外部物体反射的信号。另选地,这些传感器可以构造成根据从路边传感器发送的信号检测外部物体。
雷达从车辆2沿规定方向发射诸如毫米波之类的无线电波,并捕获反射波以获取物体的位置(距离和方向)。车辆2的选定位置可以装配有至少一个雷达。优选地,前方环境检测传感器10包括沿向前的方向照射无线电波的前方雷达,并且后方环境检测传感器11包括沿向后的方向照射无线电波的后方雷达。更优选地,后方环境检测传感器11包括沿任一横向方向发射无线电波的一对雷达。
激光雷达从车辆2沿规定方向照射诸如红外线之类的光,并捕获反射光以获取物体的位置(距离和方向)。在车辆2上的选定位置可以装配有至少一个激光雷达。优选地,前方环境检测传感器10包括沿向前的方向发射光的前方激光雷达,并且后方环境检测传感器11包括沿向后的方式发射光的后方激光雷达。更优选地,后方环境检测传感器11包括在任一横向方向上发射光的一对侧面激光雷达。
外部摄像头构造成捕获车辆2周围区域的图像,以便捕获周围物体(例如车辆、行人、护栏、路缘石、墙壁、分隔带、道路标志、道路形状和绘制在道路上的道路标记)的图像。外部摄像头可以由使用固态图像传感器(例如CCD和CMOS)的数字摄像头组成。车辆2外部的选定位置处可以设置有至少一个摄像头。优选地,前方环境检测传感器10包括捕获车辆2的前方视图的前方摄像头,并且后方环境检测传感器11包括捕获车辆2的后方视图的后方摄像头。更优选地,后方环境检测传感器11包括捕获从车辆2看到的横向视角的一对侧面摄像头。外部摄像头可以包括立体摄像头。
路面状态获取传感器12是用于获取车辆2所行驶的路面状况的传感器。路面状态获取传感器12包括例如为每个轮设置的轮旋转速度传感器,以估计路面摩擦系数μ。操作量传感器组7、握持状态检测传感器8、车辆状态检测传感器9、前方环境检测传感器10、后方环境检测传感器11和路面状态获取传感器12将检测/获取结果转发给控制单元15。
控制单元15包括算术处理单元(CPU)和存储装置(诸如ROM和RAM之类的存储器),并且基本上由电子控制单元(ECU)或计算机组成,构造成根据存储装置(存储器)中存储的计算机程序执行接触规避辅助操作所需的各种处理。控制单元15可以构造成成单个硬件,或者可以构造成成布置在车辆各部分中的多个硬件。
控制单元15包括多个功能单元,这些功能单元可以通过电子控制单元15的操作来实现,并且功能单元可以仅由软件来实现,或者可以通过使用专门设计的硬件(例如LSI、ASIC和FPGA)来实现。这些功能单元可以包括握持状态识别单元31、超驰确定单元32、车辆状态确定单元33、前方障碍物识别单元34、碰撞风险确定单元35、自由空间识别单元36、后方障碍物识别单元37、路面摩擦系数估计单元38和运动确定单元39。
握持状态识别单元31根据握持状态检测传感器8的检测结果(握持状态)来识别车辆操作者的握持状态。更具体地,握持状态识别单元31构造成区分车辆操作者用双手握持方向盘21的双手握持状态、车辆操作者用单手握持方向盘21的单手握持状态以及车辆操作者的双手都不握持方向盘21的双手都不握持状态。
即使在车辆操作者用双手握持方向盘的情况下,如果至少任一手握持方向盘不够牢靠(例如仅用手指握持方向盘时),则该握持状态可以不被认为是双手握持状态,而被认为是单手握持状态或双手都不握持状态。另外,如果至少任一手在不适当的位置(如六点钟位置或十二点钟位置)握持方向盘,则该握持状态也可以不被认为是双手握持状态,而被认为是单手握持状态或双手都不握持状态。双手握持状态被认为是适当的握持状态,而其他所有的握持状态被认为是不适当的握持状态。
当检测到单手握持状态时,握持状态识别单元31进一步确定车辆操作者用哪只手握持方向盘21。当由于障碍物规避操作的启动而使方向盘21沿某一方向转动,并检测到单手握持状态时,根据车辆操作者是用左手还是右手握持方向盘,车辆操作者握持方向盘21的手的张紧程度不同。假设在启动障碍物规避操作时,方向盘21沿顺时针方向转动。如果车辆操作者用左手握持方向盘21,则车辆操作者的左手可以跟随方向盘的转动移动而不丧失握持力或遭受不当的张紧。但是,如果车辆操作者用右手握持方向盘21,则由于肩关节的结构,车辆操作者的右手会在跟随方向盘的转动移动而不丧失握持力或遭受不当的张紧时经历一定的困难。因此,当车辆操作者单手握持方向盘21时,根据车辆操作者的哪只手握持方向盘21,存在舒适的转向方向和不舒适的转向方向。如果障碍物规避操作需要将方向盘21沿不舒适的方向移动,则需要防止车辆操作者的手或肩受到不当的张紧。
超驰确定单元32根据加速踏板下压量Ap、制动踏板力Pb、转向角θs、转向角速率和/或转向握持状态,确定在由控制单元15执行接触规避辅助控制期间是否存在人为干预(超驰)。超驰确定单元32区分不同的人为干预模式,该人为干预模式可以包括加速器超驰、制动超驰和转向超驰。
车辆状态确定单元33根据车辆速度、偏航率等确定(估计)自身车辆的预测行驶路径。前方障碍物识别单元34根据前方环境检测传感器10的检测/获取结果识别前方障碍物,同时确定检测到的前方障碍物的属性(车辆、行人、结构等)、相对位置(与自身车辆的距离和方向)以及相对速度。这种信息在下面的公开中可以称为前方障碍物信息。碰撞风险确定单元35根据由车辆状态确定单元33确定的车辆的预测行驶路径和由前方障碍物识别单元34获取的前方障碍物信息,确定或评价自身车辆与障碍物碰撞的风险。更具体地,碰撞风险确定单元35确定与检测到的车辆前方的障碍物碰撞的风险、预测碰撞发生的方向、TTC(到发生碰撞的时间)、搭接系数(lap factor)(通过将自身车辆与前方障碍物的重叠量除以自身车辆的宽度而得到的值)等。
自由空间识别单元36根据前方环境检测传感器10的检测/获取结果,识别车辆前方路面上的白线(道路标记)、来车、路边结构、行人、路肩等。自由空间识别单元36还可以根据前方环境检测传感器10的检测/获取结果,识别或定义自身车辆可以安全占用的自由空间。后方障碍物识别单元37可以根据后方环境检测传感器11的检测/获取结果,识别相邻车道、位于自身车辆后方且与自身车辆横向相邻的物体、路边结构等。此外,后方障碍物识别单元37确定检测到的位于自身车辆后方或与自身车辆横向相邻的每个物体的属性(车辆、行人、结构等)、相对位置(与自身车辆的距离和方向)以及相对速度。这些信息在下面的公开中可称为后方和横向障碍物信息。
路面摩擦系数估计单元38根据路面状态获取传感器12的获取结果估计路面摩擦系数μ。例如,路面摩擦系数估计单元38可以通过操作制动执行器17以在后轮上产生制动力Fb,并测量前轮和后轮的旋转速度之差来估计路面摩擦系数μ。路面摩擦系数估计单元38可以在不脱离本发明的精神的情况下,通过使用任何其他本身已知的方法来估计路面摩擦系数μ。
运动确定单元39根据握持状态识别单元31的检测结果(握持状态)、超驰确定单元32的确定结果(超驰)以及碰撞风险确定单元35的确定结果(碰撞风险)、自由空间识别单元36的鉴定结果(自由空间信息)、后方障碍物识别单元37的鉴定结果(关于车辆后方的障碍物)以及路面摩擦系数估计单元38的估计结果(路面摩擦系数μ)控制动力系统3、制动装置4、转向装置5以及通知装置6的操作,以提供辅助来规避被认为位于车辆前方的障碍物。
更具体地,运动确定单元39通过根据诸如前方障碍物的相对位置之类的各种信息,评估与检测到的车辆前方的障碍物的碰撞风险,确定是否需要进行用于接触规避的驾驶操作辅助,如果确定驾驶操作辅助是必要的,则将通过执行规定的计算处理获得的命令信号转发给动力系统3、制动装置4、转向装置5和通知装置6,以规避与位于车辆前方的障碍物的接触。
图2是图1所示的运动确定单元39的框图。如图2所示,运动确定单元39包括制动规避极限距离计算单元41、制动力命令计算单元42、接触规避轨迹计算单元43、转向角命令计算单元44、转向前方接触风险确定单元45、转向后方接触风险确定单元46和最终命令计算单元47。
制动规避极限距离计算单元41根据碰撞风险和路面摩擦系数μ计算出制动规避极限距离,该制动规避极限距离是车辆2通过制动规避与前方障碍物接触所需的相对距离。制动力命令计算单元42根据由制动规避极限距离和车辆速度计算出的所需减速量以及通过将计算出的减速量乘以车辆2的质量获得的制动力Fb,计算出要由制动装置4产生的制动力Fb的命令值。
接触规避轨迹计算单元43根据碰撞风险和路面摩擦系数μ计算出车辆2所应采取的接触规避轨迹以通过车辆2的转向操作规避与前方障碍物的接触。转向角命令计算单元44计算出车辆2跟踪或跟随接触规避轨迹所需的转向角δ的命令值。
转向前方接触风险确定单元45根据自由空间信息以及由接触规避轨迹计算单元43计算出的接触规避轨迹,计算出当通过转向规避与前方障碍物的接触时与前方障碍物碰撞的风险。转向后方接触风险确定单元46根据自由空间信息以及由接触规避轨迹计算单元43计算出的接触规避轨迹,计算出当通过转向规避与障碍物接触时与后方障碍物或横向障碍物碰撞的风险。
最终命令计算单元47根据用于通过驾驶(推进)操作规避接触的驱动力的命令值、用于通过制动操作规避接触的制动力Fb的命令值、用于通过转向操作规避接触的转向角δ的命令值、通过转向规避与前方障碍物接触的接触风险以及通过转向规避与后方障碍物接触的接触风险,确定需要驾驶操作辅助以规避与前方障碍物接触。当确定驾驶操作辅助有必要时,最终命令计算单元47选择要采取的控制动作,并执行相应的控制操作,例如计算动力系统3、制动装置4、转向装置5和通知装置6的最终命令值,并将命令信号(驱动命令信号、制动命令信号、转向命令信号、警告命令信号等)转发给车辆2的相应功能部分。
更具体地,最终命令计算单元47执行驱动力分配控制,以经由动力系统3的驱动力分配装置将动力系统3产生的驱动力分配至左轮和右轮。最终命令计算单元47执行制动力控制,该制动力控制使制动装置4的制动执行器17产生预定的制动力Fb,而不考虑制动踏板28的制动踏板力Pb。另外,最终命令计算单元47执行制动力分配控制,以经由制动执行器17的制动力分配装置将在制动执行器17中产生的预定制动力Fb分配至各车轮上设置的卡钳16。下文中,驱动力分配控制和制动力分配控制将被统称为制动/驱动力分配控制。最终命令计算单元47执行转向角控制,以便经由转向装置5的转向马达20实现预定的转向角δ,而不管转向角θs如何。最终命令计算单元47还执行通知控制,该控制使通知装置6通知车辆操作者或发出警告。
接下来,在下文中描述由如上所述构造的控制单元15提供的接触规避辅助操作的处理。图3是由图1所示的控制单元15执行的接触规避辅助操作的流程图。控制单元15以预定的控制周期重复图3所示的接触规避辅助处理。如图3所示,在接触规避辅助处理中,控制单元15执行相对位置获取处理,从而根据前方环境检测传感器10的检测/获取结果获取车辆2与前方障碍物之间的相对位置(步骤ST1)。此外,控制单元15执行传感器值获取处理,从而获取诸如操作量传感器组7、握持状态检测传感器8、车辆状态检测传感器9、后方环境检测传感器11以及路面状态获取传感器12之类的各种传感器的检测/获取值(步骤ST2)。
随后,控制单元15执行必要性确定处理,以至少根据就前方障碍物的相对位置来说与前方障碍物的碰撞风险来确定接触规避的驾驶操作辅助是否必要(步骤ST3)。当在步骤ST3中确定驾驶操作辅助是不必要的时,控制单元15结束该例程,并重新开始该例程。另一方面,当在步骤ST3中确定驾驶操作辅助是必要的时,控制单元15执行驾驶操作辅助处理(步骤ST4)。
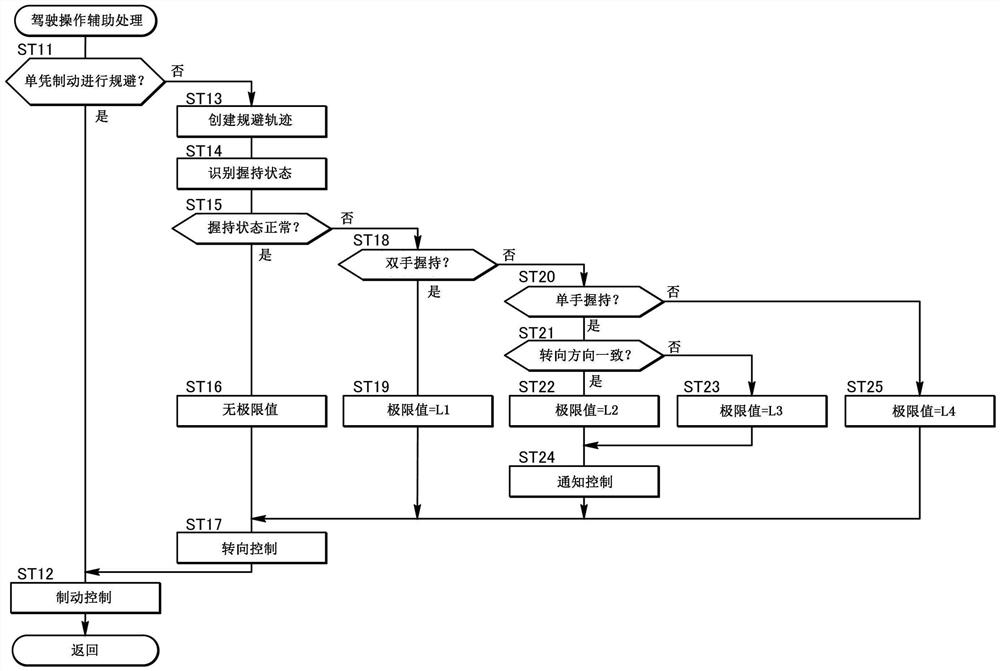
图4是图3所示的驾驶操作辅助处理的流程图。控制单元15在预定的控制周期重复图4所示的驾驶操作辅助处理。如图4所示,在驾驶操作辅助处理中,控制单元15确定是否可以单凭制动操作规避与前方障碍物的接触(步骤ST11)。更具体地,控制单元15根据包括相对位置在内的前方障碍物信息,确定是否能够单凭制动操作来规避与前方障碍物的接触。当确定单凭制动操作就能够规避接触时(ST11:是),控制单元15执行制动控制,据此在制动装置4中要产生的制动力Fb(例如,根据路面摩擦系数μ的最大制动力)作为命令信号产生(步骤ST12)。然后结束控制周期,再次开始新的控制周期。当确定单凭制动操作不能规避接触时(ST11:否),控制单元15计算转向操作应采取的接触规避轨迹,以规避接触(步骤ST13)。
随后,控制单元15使握持状态识别单元31识别车辆操作者相对于方向盘21的握持状态(步骤ST14)。更具体地,控制单元15鉴定双手握持状态、单手握持状态和双手都不握持状态中的一种。控制单元15还可以鉴定车辆操作者的握持状态是正常握持状态还是异常握持状态。此外,当控制单元15识别出单手握持状态时,握持状态识别单元31区分车辆操作者握持方向盘21的手是右手还是左手,以确定对车辆操作者握持方向盘21的手造成相对较小张紧的方向盘转动方向。
此后,控制单元15确定车辆操作者的握持状态是否为正常握持状态(步骤ST15),并且当在步骤ST15中确定为正常握持状态时(是),在转向控制中设定无极限值(步骤ST16)。换句话说,控制单元15选择在转向控制中设定无极限值的正常模式。然后,控制单元15在正常模式下执行无极限值的转向控制(步骤ST17),程序流前进至步骤ST12的处理,然后重新开始控制处理。
所述极限值是本实施方式中转向控制中的转向扭矩的极限值(上限值)。控制单元15将沿步骤ST13中计算出的接触规避轨迹驱动车辆2所需的转向角δ设定为目标值,并例如通过PID控制来控制流经转向马达20的电流。在正常模式下,实际上,对流经转向马达20的电流的值没有限制。因此,控制单元15使转向马达20的额定电流为最大值,此时,转向马达20输出额定转矩。
当在步骤ST15中确定为握持状态异常时(否),控制单元15随后确定车辆操作者的握持状态是否为双手握持状态(步骤ST18)。当在步骤ST18中确定为双手握持方向盘时(是),控制单元15将第一极限值L1设定为转向控制中的极限值(步骤ST19)。换句话说,控制单元15选择为转向控制设定极限值的极限模式。第一极限值L1是转向扭矩的上限值,该上限值是比额定电流小的值。换句话说,极限值越低,转向扭矩越受限制。然后,控制单元15在涉及第一极限值L1的极限模式下执行转向控制(步骤ST17),在重新开始控制处理之前,程序流程前进到步骤ST12的处理。
因此,即使在双手握持状态下,如果识别出异常握持状态(ST15:否),则以转向控制中设定的极限值(L1)进行控制处理。从而,也是在异常握持状态的情况下,在执行转向控制以规避障碍物的同时,保护车辆操作者的手不受到不当张紧。
当在步骤ST18中确定车辆操作者不处于双手握持状态时(否),控制单元15接着确定车辆操作者的握持状态是否为单手握持状态(步骤ST20)。当在步骤ST20中确定为单手握持状态时(是),控制单元15接着确定转向控制中的转向方向是否对应于不会对握持方向盘的手造成不适当的张紧的方向(步骤ST21)。如果转向控制中的转向方向确实对应于步骤ST21中不会对手造成任何不适当的张紧的方向(是),或者如果转向方向与步骤ST21中的舒适的转向方向一致(是),则控制单元15将第二极限值L2设定为转向控制中的极限值(步骤ST22)。换句话说,控制单元15选择涉及第二极限值L2的极限模式。第二极限值L2是比第一极限值L1小的值(L2 在步骤ST22或步骤ST23之后,控制单元15执行通知控制(步骤ST24)。更具体地,控制单元15控制通知装置6,以便借助光或声音恳求车辆操作者适当地握持方向盘21。此外,控制单元15执行转向装置5的通知控制,以便经由方向盘21恳求车辆操作者握持方向盘21。更具体地,控制单元15产生用于控制转向马达20的控制信号,以便经由转向机构19以预定振幅沿顺时针和逆时针方向周期性地或振动地移动方向盘21。预定振幅可以是例如小振幅,使得可转向轮18没有实质转向。 转向马达20的通知控制的控制信号可以由待添加到或叠加在图5A所示的转向控制的电流值上的基本上是正弦波或锯齿形的电流命令信号组成。在这种情况下,循环电流命令信号的电流值是对称的,或者在正负两个方向上具有相同的幅度。另选地,控制单元15可以设定转向速度,使得在当前转向方向的转向方向上周期性电流命令信号的电流值大于在如图5B所示的相反方向上周期性电流命令信号的电流值。换句话说,在当前转向方向的转向方向(用于障碍物规避操作)上循环转向移动的角速度(转向扭矩)大于与当前转向方向的转向方向相反的循环转向移动的角速度(转向扭矩)。 随后,控制单元15执行涉及第二极限值L2或第三极限值L3的极限模式下的转向控制(步骤ST17),并且处理前进到步骤ST12,然后重新开始控制处理。如图5C所示,用于转向装置5的通知控制的电流命令信号被添加至极限模式下的转向控制的电流命令信号或叠加在该电流命令信号上。换句话说,除了用于障碍物规避操作的转向控制外,还执行用于转向装置5的通知控制。 这样,当检测到单手握持状态时(ST20:是),控制单元15通过将极限模式的极限值设定为比检测到双手握持状态时(ST18:是)更小的值(极限值=L2,L3<L1)来执行步骤ST17中的转向控制。因此,能够减小车辆操作者在单手握持状态下由于规避转向控制的障碍物而引起的手上的载荷。 当检测到单手握持状态,并且转向控制中的转向方向和手握持方向盘21的舒适转向方向相互重合时(ST21:是),控制单元15执行步骤ST17中的转向控制,使得极限值被设定为大于转向控制中的转向方向和手握持方向盘21的舒适转向方向不相互重合的情况(ST21:否)下的极限值(极限值=L2>L3)。因此,即使检测到单手握持状态,也能够在防止握持方向盘21的手上的载荷变得过大的同时,可靠地规避与障碍物的接触。 当在步骤ST20中没有检测到单手握持状态时,或者当车辆操作者的双手都没有握持方向盘21时(否),控制单元15将第四极限值L4设定为转向控制中的极限值(步骤ST25)。换句话说,控制单元15选择涉及第四极限值L4的极限模式。第四极限值L4是比第三极限值L3小的值(L4 当车辆操作者握持方向盘21时,握持力可能会作为转向马达20在障碍物规避操作中转动方向盘21的阻力。因此,控制单元15在步骤ST17中执行转向控制,使得当检测到双手握持状态或单手握持状态时(ST18:是,ST20:是)的极限值(极限值=L1至L3>L4)比检测到双手都不握持状态时(ST20:否)的极限值高。因此,能够更可靠地规避车辆2与障碍物的接触。 如上所述,当在步骤ST17中执行转向控制时,控制单元15根据车辆操作者相对于方向盘21的握持状态选择步骤ST19、步骤ST22、步骤ST23和步骤ST25中的极限模式。因此,当在图3的步骤ST3中确定驾驶操作辅助是必要的时(是),控制单元15通过执行转向控制来辅助车辆操作者规避障碍物,从而规避与障碍物的接触,同时不对车辆操作者的手造成任何不当的张紧。 在上述步骤ST19、步骤ST22、步骤ST23或步骤ST25中选择的极限模式下,控制单元15限制转向控制中的转向扭矩。换句话说,极限模式是限制转向控制中的转向扭矩的控制模式。因此,由于在极限模式下执行转向控制时(ST17),方向盘21的转向扭矩被限制,因此防止车辆操作者握持方向盘21的手以大的转向扭矩扭转。 当检测到单手握持状态时(ST20:是),控制单元15在步骤ST24中执行用于转向装置5的通知控制,以便经由方向盘21提示车辆操作者握持方向盘21。因此,经由方向盘21传达的信号,直观地使车辆操作者以适当方式握持方向盘21。 如上所述,通知控制包括使转向马达20以预定振幅在顺时针和逆时针方向上周期性地移动转向装置5从而使方向盘21振动的控制动作。因此,由转向装置5的振动引起的方向盘21的振动能够提示车辆操作者适当握持方向盘21。用于转向装置5的通知控制不仅可以包括用于转向装置5的振动控制,还可以包括显示控制动作,例如设置在转向装置5中的显示装置上的指示灯或图标的点亮和/或闪烁。 在该通知控制中,如上所述,控制单元15可以使方向盘的与障碍物规避控制的转向方向相同方向上的振动转动速度大于方向盘的与障碍物规避控制的转向方向相反方向上的振动转动速度。从而,能够提示车辆操作者握持方向盘21,并告知启动的障碍物规避控制的方向盘21的转向方向。 已经根据具体实施方式描述了本发明,但在不脱离本发明的范围的情况下,可以以各种方式修改本发明。 例如,控制单元15在前述实施方式中的步骤ST18、步骤ST21、步骤ST22或步骤ST24中选择的极限模式下限制转向控制中的转向扭矩,但另选地,控制单元15可以在极限模式下限制转向控制中的转向速度。通过这样限制在执行极限模式下的转向控制时的转向速度(ST17),防止车辆操作者握持方向盘21的手以意外的高角速度扭转。 另选地,控制单元15可以在极限模式下的转向控制中限制转向角δ。通过这样限制在极限模式下执行转向控制时的转向角(ST17),可以防止车辆操作者的握持方向盘21的手以意外地大角度扭转。在这种情况下,当车辆操作者的双手都不握持方向盘21时,通常采用的极限值L4可以大于L2和L3(L4>L2、L3),甚至可以大于L1(L4>L1)。 在不脱离本发明的范围的情况下,可以适当地改变根据本发明的布置的每个构件或部分的具体构造、布置、数量、过程等。另外,应当注意的是,上述实施方式中所示的各种要素不一定是本发明的必要要素,在不脱离本发明的范围的情况下,可以适当地修改或省略这些要素。
- 车辆接触规避辅助系统
- 用于车辆的辅助停车系统、非接触电力发送装置以及非接触电力接收装置