一种主动均衡BMS中采集和均衡共线时单体电压校正方法
文献发布时间:2023-06-19 10:41:48
技术领域
本发明属于单体电压校正技术领域,尤其涉及一种主动均衡BMS中采集和均衡共线时单体电压校正方法。
背景技术
主动均衡电池管理系统(battery management system,以下简称为BMS)中单体电压采集和均衡功能至关重要。均衡进行时,若单体电池连接端(正极或负极)仅有一根导线(即采集和均衡共线),由于导线存在电阻(一般为几十毫欧),会在导线上产生一定的电压降,造成实际电压与通过电子线路采集到的电压之间误差较大(几十至上百毫伏),无法满足GBT38661-2020国标中要求的10mV;因此,我们提出一种主动均衡BMS中采集和均衡共线时单体电压校正方法。
发明内容
本发明的目的在于提供一种主动均衡BMS中采集和均衡共线时单体电压校正方法,以解决背景技术的问题。
为实现上述目的,本发明的一种主动均衡BMS中采集和均衡共线时单体电压校正方法的具体技术方案如下:
一种主动均衡BMS中采集和均衡共线时单体电压校正方法,包括如下步骤:采用软件算法控制电子线路,自动实施对全部导线电阻的测量,并对测量值进行限幅,最终将正确可信的测量值保存到EEPROM中。
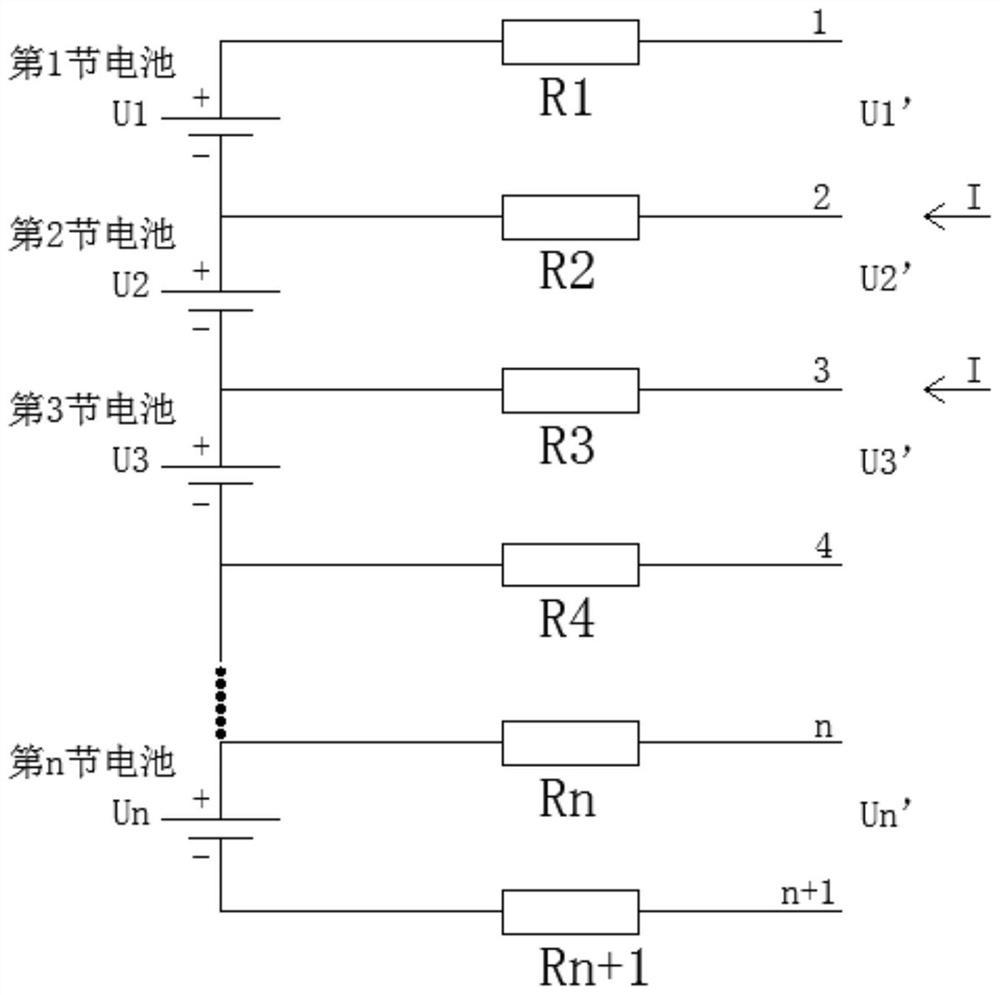
进一步的,将电池组按单个电池标号1、2、3…n,第1节电池的电压采集点为1和2,第2节电池的电压采集点为2和3,第3节电池的电压采集点为3和4,以此类推,第n节电池的电压采集点为n和n+1。
进一步的,所述第1节电池正极连接导线电阻为R1,负极连接导线电阻为R2;第2节电池正极连接导线电阻为R2,负极连接导线电阻为R3;第3节电池正极连接导线电阻为R3,负极连接导线电阻为R4,以此类推,第n节电池正极连接导线电阻为Rn,负极连接导线电阻为Rn+1。
进一步的,所述软件算法对于电池的充电模式和放电模式进行控制测量。
进一步的,对于充电模式,所述软件算法控制的测量包括如下步骤:
S11、以第2节电池为例,当其处于充电模式(均衡电流I由采集点2流入)时,由基尔霍夫定律有:
U2’=U2+I×R2+I×R3 1;
U1’=U1–I×R2 2;
U3’=U3–I×R3 3;
U1’、U2’、U3’代表通过电子线路采集到的电压,U1、U2、U3代表电池实际电压,I代表均衡电流,R2和R3值为已知,则由式1、2、3可计算出电压实际值U1、U2、U3,分析式1、2、3可知,当某一节电池处于充电模式时,其采集到的电压比实际电压偏高,与其相邻的两节电池也会受到影响,采集到的电压比实际电压偏低,必须进行校正;
S12、令均衡电流I=0,即第1、2和3节电池都不进行均衡,通过电子线路采集得到第1、2和3节电池的电压U1、U2和U3;
S13、对第2节电池以电流I(≠0)进行充电,通过电子线路采集得到第1、2节电池的电压U1’、U2’;
S14、此时步骤S1中式1、2仍然成立;在已知U1、U1’和I后,由式2可以计算得到R2;
S15、在已知U2、U2’、I和R2后,由式1可以计算得到R3;
S16、对第1节电池以电流I(≠0)进行充电,通过电子线路采集得到其电压U1’,同理有:
U1’=U1+I×R1+I×R2 4;
在已知U1、U1’、I和R2后,由式4可以计算得到R1;
S17、对第3节电池以电流I(≠0)进行充电,通过电子线路采集得到其电压U3’,同理有:
U3’=U3+I×R3+I×R4 5;
在已知U3、U3’、I和R3后,由式5可以计算得到R4;
S18、至此,所有导线电阻均按照这种方式进行控制测量。
进一步的,对于放电模式,所述软件算法控制的测量包括如下步骤:
S21、以第2节电池为例,当其处于放电模式(均衡电流I由采集点3流入)时,由基尔霍夫定律有:
U2’=U2-I×R2-I×R3 6;
U1’=U1+I×R2 7;
U3’=U3+I×R3 8;
U1’、U2’、U3’代表通过电子线路采集到的电压,U1、U2、U3代表电池实际电压,I代表均衡电流,R2和R3值为已知,则由式6、7、8可计算出电压实际值U1、U2、U3,分析式6、7、8可知,当某一节电池处于放电模式时,其采集到的电压比实际电压偏低;与其相邻的两节电池也会受到影响,采集到的电压比实际电压偏高,必须进行校正;
S22、令均衡电流I=0,即第1、2和3节电池都不进行均衡,通过电子线路采集得到第1、2和3节电池的电压U1、U2和U3;
S23、对第2节电池以电流I(≠0)进行放电,通过电子线路采集得到第1、2节电池的电压U1’、U2’;
S24、此时步骤S1中式6、7仍然成立;在已知U1、U1’和I后,由式7可以计算得到R2;
S25、在已知U2、U2’、I和R2后,由式6可以计算得到R3;
S26、对第1节电池以电流I(≠0)进行放电,通过电子线路采集得到其电压U1’,同理有:
U1’=U1-I×R1-I×R2 9;
在已知U1、U1’、I和R2后,由式9可以计算得到R1;
S27、对第3节电池以电流I(≠0)进行放电,通过电子线路采集得到其电压U3’,同理有:
U3’=U3-I×R3-I×R4 10;
在已知U3、U3’、I和R3后,由式10可以计算得到R4;
S28、至此,所有导线电阻均按照这种方式进行测量。
进一步的,所述软件算法控制的测量适用于三节以上的电池组。
相比较现有技术而言,本发明具有以下有益效果:本主动均衡BMS中采集和均衡共线时单体电压校正方法,软件算法自动测量导线电阻值,然后根据均衡电流值、导线电阻值和充放电方向,实时对采集到的单体电压进行校正,有效降低导线电阻导致的压降引起电压采集误差,达到实时对采集到的单体电压进行校正。
附图说明
图1为本发明n节单体电池采集和均衡示意图。
具体实施方式
为了更好地了解本发明的目的、结构及功能,下面结合附图1,对本发明的理解。
一种主动均衡BMS中采集和均衡共线时单体电压校正方法,包括如下步骤:采用软件算法控制电子线路,自动实施对全部导线电阻的测量,并对测量值进行限幅,最终将正确可信的测量值保存到EEPROM中。
将电池组按单个电池标号1、2、3…n,第1节电池的电压采集点为1和2,第2节电池的电压采集点为2和3,第3节电池的电压采集点为3和4,以此类推,第n节电池的电压采集点为n和n+1。
其中,所述第1节电池正极连接导线电阻为R1,负极连接导线电阻为R2;第2节电池正极连接导线电阻为R2,负极连接导线电阻为R3;第3节电池正极连接导线电阻为R3,负极连接导线电阻为R4,以此类推,第n节电池正极连接导线电阻为Rn,负极连接导线电阻为Rn+1。
所述软件算法对于电池的充电模式和放电模式进行控制测量。
其中,对于充电模式,所述软件算法控制的测量包括如下步骤:
S11、以第2节电池为例,当其处于充电模式(均衡电流I由采集点2流入)时,由基尔霍夫定律有:
U2’=U2+I×R2+I×R3 1;
U1’=U1–I×R2 2;
U3’=U3–I×R3 3;
U1’、U2’、U3’代表通过电子线路采集到的电压,U1、U2、U3代表电池实际电压,I代表均衡电流,R2和R3值为已知,则由式1、2、3可计算出电压实际值U1、U2、U3,分析式1、2、3可知,当某一节电池处于充电模式时,其采集到的电压比实际电压偏高,与其相邻的两节电池也会受到影响,采集到的电压比实际电压偏低,必须进行校正;
S12、令均衡电流I=0,即第1、2和3节电池都不进行均衡,通过电子线路采集得到第1、2和3节电池的电压U1、U2和U3;
S13、对第2节电池以电流I(≠0)进行充电,通过电子线路采集得到第1、2节电池的电压U1’、U2’;
S14、此时步骤S1中式1、2仍然成立;在已知U1、U1’和I后,由式2可以计算得到R2;
S15、在已知U2、U2’、I和R2后,由式1可以计算得到R3;
S16、对第1节电池以电流I(≠0)进行充电,通过电子线路采集得到其电压U1’,同理有:
U1’=U1+I×R1+I×R2 4;
在已知U1、U1’、I和R2后,由式4可以计算得到R1;
S17、对第3节电池以电流I(≠0)进行充电,通过电子线路采集得到其电压U3’,同理有:
U3’=U3+I×R3+I×R4 5;
在已知U3、U3’、I和R3后,由式5可以计算得到R4;
S18、至此,所有导线电阻均按照这种方式进行控制测量。
另外,对于放电模式,所述软件算法控制的测量包括如下步骤:
S21、以第2节电池为例,当其处于放电模式(均衡电流I由采集点3流入)时,由基尔霍夫定律有:
U2’=U2-I×R2-I×R3 6;
U1’=U1+I×R2 7;
U3’=U3+I×R3 8;
U1’、U2’、U3’代表通过电子线路采集到的电压,U1、U2、U3代表电池实际电压,I代表均衡电流,R2和R3值为已知,则由式6、7、8可计算出电压实际值U1、U2、U3,分析式6、7、8可知,当某一节电池处于放电模式时,其采集到的电压比实际电压偏低;与其相邻的两节电池也会受到影响,采集到的电压比实际电压偏高,必须进行校正;
S22、令均衡电流I=0,即第1、2和3节电池都不进行均衡,通过电子线路采集得到第1、2和3节电池的电压U1、U2和U3;
S23、对第2节电池以电流I(≠0)进行放电,通过电子线路采集得到第1、2节电池的电压U1’、U2’;
S24、此时步骤S1中式6、7仍然成立;在已知U1、U1’和I后,由式7可以计算得到R2;
S25、在已知U2、U2’、I和R2后,由式6可以计算得到R3;
S26、对第1节电池以电流I(≠0)进行放电,通过电子线路采集得到其电压U1’,同理有:
U1’=U1-I×R1-I×R2 9;
在已知U1、U1’、I和R2后,由式9可以计算得到R1;
S27、对第3节电池以电流I(≠0)进行放电,通过电子线路采集得到其电压U3’,同理有:
U3’=U3-I×R3-I×R4 10;
在已知U3、U3’、I和R3后,由式10可以计算得到R4;
S28、至此,所有导线电阻均按照这种方式进行测量。
软件算法控制的测量适用于三节以上的电池组。
软件算法自动测量导线电阻值,然后根据均衡电流值、导线电阻值和充放电方向,实时对采集到的单体电压进行校正,有效降低导线电阻导致的压降引起电压采集误差,达到实时对采集到的单体电压进行校正。另外,为保证精度,即使上电从EEPROM中读取的导线电阻数据有效,也可以有软件算法控制电子线路重新按上述的测量过程执行,防止导线电阻值发生变化后仍然使用前次的测量结果,确保实时性。
可以理解,本发明是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱离本发明的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另外,在本发明的教导下,可以对这些特征和实施例进行修改以适应具体的情况及材料而不会脱离本发明的精神和范围。因此,本发明不受此处所公开的具体实施例的限制,所有落入本申请的权利要求范围内的实施例都属于本发明所保护的范围内。
- 一种主动均衡BMS中采集和均衡共线时单体电压校正方法
- 一种主动均衡BMS均衡失效检测电路及方法