一种新型激光打磨轧辊孔型装置及其操作方法
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及轧辊打磨技术领域,尤其涉及一种新型激光打磨轧辊孔型装置及其操作方法。
背景技术
目前轧辊使用前需人工使用砂轮机对孔型表面进行打磨除锈,增加轧辊孔型表面的粗糙度,打磨持续时间长,过程中施工人员的劳动强度大,打磨效率低,打磨中引起的粉尘造成二次污染,影响施工人员的身体健康和工作环境,并且打磨中可能会有砂轮片碎裂、飞溅造成的人员受伤等不安全因素,所以需要能够对轧辊孔型表面实现自动化打磨清理的打磨除锈设备,用来降低人员的劳动强度,以及粉尘造成的二次污染和人工打磨工具在使用中可能造成的人员受伤等不安全因素。
发明内容
本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
鉴于上述现有轧辊孔型表面打磨存在的问题,提出了本发明。
因此,本发明要解决的技术问题是提供一种新型激光打磨轧辊孔型装置,其目的在于如何通过自动化的激光打磨设备对轧辊孔型表面进行安全高效打磨。
为解决上述技术问题,本发明提供如下技术方案:一种新型激光打磨轧辊孔型装置,此装置包括移动平台、三轴滑台和激光执行元件,其中,三轴滑台,安装于移动平台上,其包括Z轴滑台、与所述Z轴滑台相连的Y轴滑台,以及与所述Y轴滑台相连的X轴滑台;激光执行元件,设置于所述X轴滑台上。
作为本发明所述新型激光打磨轧辊孔型装置的一种优选方案,其中:还包括激光打磨主机、除尘设备和PLC控制单元,所述PLC控制单元分别与三轴滑台、激光执行元件、激光打磨主机、除尘设备电性相连。
作为本发明所述新型激光打磨轧辊孔型装置的一种优选方案,其中:所述Z轴滑台、Y轴滑台和X轴滑台的结构相同,其中,所述Z轴滑台包括支撑管和连接于所述支撑管端部的驱动件。
作为本发明所述新型激光打磨轧辊孔型装置的一种优选方案,其中:所述支撑管包括管体和丝杆,所述丝杆通过轴承转动安装在所述管体的内腔中;所述管体的侧壁上沿其长度方向分布有导槽;所述驱动件包括驱动电机和差速器,所述差速器同轴连接于所述驱动电机的输出轴上,且所述差速器通过锥形齿轮与所述丝杆配合相连。
作为本发明所述新型激光打磨轧辊孔型装置的一种优选方案,其中:所述Z轴滑台和Y轴滑台中还包括连接件,所述连接件配合设置于所述支撑管外侧;所述连接件包括固定板和卡块,所述卡块滑动于所述导槽内,且通过连接孔配合连接在所述丝杆上,其端部于所述固定板固定相连。
作为本发明所述新型激光打磨轧辊孔型装置的一种优选方案,其中:所述Y轴滑台和Z轴滑台中的固定板配合相连。
作为本发明所述新型激光打磨轧辊孔型装置的一种优选方案,其中:所述Y轴滑台的端部还设置有安装台,所述X轴滑台配合连接于所述安装台上。
作为本发明所述新型激光打磨轧辊孔型装置的一种优选方案,其中:所述X轴滑台中还包括连接台,所述连接台包括螺纹管和连接板,所述螺纹管安装在所述连接板上;所述螺纹管配合连接于所述X轴滑台内的丝杆上;所述连接板连接于所述安装台上。
作为本发明所述新型激光打磨轧辊孔型装置的一种优选方案,其中:还包括监测单元,与所述PLC控制单元电性连接,且所述监测单元包括测距传感器和光电传感器,所述测距传感器安装于所述X轴滑台的端部侧壁上,所述光电传感器固定安装于所述连接板上。
本发明要解决的另一个问题是提供一种新型激光打磨轧辊孔型装置的操作方法,其目的在于如何使用上述自动化的激光打磨设备对轧辊孔型表面进行安全高效打磨。
为解决上述技术问题,本发明提供如下技术方案:一种新型激光打磨轧辊孔型装置的操作方法,采用如上述的新型激光打磨轧辊孔型装置,还包括以下步骤:
将装置移动至轧辊工装存放的位置,根据轧辊型号,在所述PLC控制单元中输入相应参数,并启动装置运行;
所述三轴滑台运动,所述Z轴滑台带动所述Y轴滑台和X轴滑台运行至轧辊中心轴位置,所述Y轴滑台带动X轴滑台运行至轧辊孔面,所述X轴滑台带动所述激光执行元件向轧辊孔面靠近;
当所述测距传感器检测到设定焦距时停止,所述激光执行元件开始打磨,所述除尘设备开始运行,同时所述Z轴滑台和Y轴滑台根据设定的PLC程序控制所述激光执行元件沿着轧辊表面运行;
通过所述光电传感器感应所述三轴滑台的运动位置,当清理完轧辊相应侧孔面后,将轧辊翻转,再按照上述步骤清理相对侧的孔面,从而打磨完整的轧辊孔面。
本发明的有益效果:
本发明相对于原有手持打磨工具除锈方式,该设备自动化作业可有效的降低员工的劳动强度,减轻车间内噪音与环境污染,降低对人员的伤害;而激光打磨可有效避免手动打磨不均匀和锈斑清理不干净的情况,且激光打磨不会改变钢件的材料性能,避免过度打磨,提高轧辊使用寿命。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
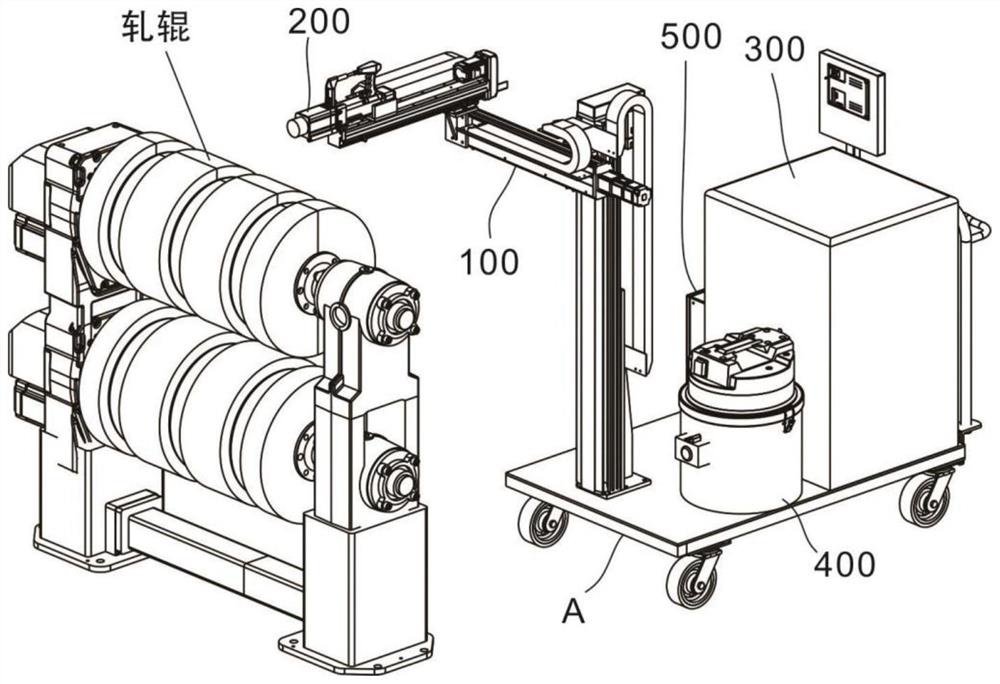
图1为本发明新型激光打磨轧辊孔型装置的整体结构示意图。
图2为本发明新型激光打磨轧辊孔型装置的整体侧视结构示意图。
图3为本发明新型激光打磨轧辊孔型装置的三轴滑台整体结构示意图。
图4为本发明新型激光打磨轧辊孔型装置的Z轴滑台具体结构示意图。
图5为本发明新型激光打磨轧辊孔型装置的Z轴滑台T面剖视结构示意图。
图6为本发明新型激光打磨轧辊孔型装置的连接件结构示意图。
图7为本发明新型激光打磨轧辊孔型装置的Y轴滑台和X轴滑台连接及爆炸结构示意图。
图8为本发明新型激光打磨轧辊孔型装置的X轴滑台连接结构示意图。
图9为本发明新型激光打磨轧辊孔型装置的应用场景示意图。
具体实施方式
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合说明书附图对本发明的具体实施方式做详细的说明。
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
其次,此处所称的“一个实施例”或“实施例”是指可包含于本发明至少一个实现方式中的特定特征、结构或特性。在本说明书中不同地方出现的“在一个实施例中”并非均指同一个实施例,也不是单独的或选择性的与其他实施例互相排斥的实施例。
再其次,本发明结合示意图进行详细描述,在详述本发明实施例时,为便于说明,表示器件结构的剖面图会不依一般比例作局部放大,而且所述示意图只是示例,其在此不应限制本发明保护的范围。此外,在实际制作中应包含长度、宽度及深度的三维空间尺寸。
实施例1
参照图1,为本发明第一个实施例,提供了一种新型激光打磨轧辊孔型装置,此装置包括移动平台A、三轴滑台100和激光执行元件200,其中,三轴滑台100,安装于移动平台A上,其包括Z轴滑台101、与Z轴滑台101相连的Y轴滑台102,以及与Y轴滑台102相连的X轴滑台103;激光执行元件200,设置于X轴滑台101上。
还包括激光打磨主机300、除尘设备400和PLC控制单元500,PLC控制单元500分别与三轴滑台100、激光执行元件200、激光打磨主机300、除尘设备400电性相连。
其中,移动平台A可用于装置安装的平台,本实施例中采用带有万向轮的移动小推车,既方便装置的搭载安装,也便于推动装置移动。此打磨装置中主要包括三轴滑台100、激光执行元件200、激光打磨主机300、除尘设备400和PLC控制单元500,各部件均分布在移动平台A上,其中,三轴滑台100为激光执行元件200的安装台,并用于激光执行元件200的移动调整;激光执行元件200为激光输出的打磨端头,其输出的激光直接作用于轧辊的孔型表面侧壁上,用于对锈蚀的轧辊孔型表面进行除锈清理;激光打磨主机300为激光的产生设备,并将产生的激光输出至激光执行元件200中;除尘设备400用于清除除锈过程中产生的粉尘,保持车间清洁的环境;而PLC控制单元500为装置的控制中心,通过电性相连与各部件的电子元件保持连接,并通过设定程序进行相应的控制,PLC控制单元500还具有操作触控屏P,方便输入设定参数以及读取数据。
进一步的,三轴滑台100包括Z轴滑台101、Y轴滑台102和X轴滑台103,三轴独立运行并可相互配合,使得激光执行元件200能够在空间内进行三维立体的移动,从而能够保持对圆柱状的轧辊孔型表面相等的间距。
实施例2
参照图1,为本发明的第二个实施例,该实施例不同于第一个实施例的是:Z轴滑台101、Y轴滑台102和X轴滑台103的结构相同,其中,Z轴滑台101包括支撑管101a和连接于支撑管101a端部的驱动件101b。
支撑管101a包括管体101a-1和丝杆101a-2,丝杆101a-2通过轴承转动安装在管体101a-1的内腔中;管体101a-1的侧壁上沿其长度方向分布有导槽101a-11;驱动件101b包括驱动电机101b-1和差速器101b-2,差速器101b-2同轴连接于驱动电机101b-1的输出轴上,且差速器101b-2通过锥形齿轮与丝杆101a-2配合相连。
Z轴滑台101和Y轴滑台102中还包括连接件101c,连接件101c配合设置于支撑管101a外侧;连接件101c包括固定板101c-1和卡块101c-2,卡块101c-2滑动于导槽101a-11内,且通过连接孔101c-21配合连接在丝杆101a-2上,其端部于固定板101c-1固定相连。
Y轴滑台102和Z轴滑台101中的固定板101c-1配合相连。
Y轴滑台102的端部还设置有安装台102a,X轴滑台103配合连接于安装台102a上。
X轴滑台103中还包括连接台103a,连接台103a包括螺纹管103a-1和连接板103a-2,螺纹管103a-1安装在连接板103a-2上;螺纹管103a-1配合连接于X轴滑台103内的丝杆101a-2上;连接板103a-2连接于安装台102a上。
还包括监测单元600,与PLC控制单元500电性连接,且监测单元600包括测距传感器601和光电传感器602,测距传感器601安装于X轴滑台103的端部侧壁上,光电传感器602固定安装于连接板103a-2上。
相较于实施例1,进一步的,Z轴滑台101、Y轴滑台102和X轴滑台103三轴的主体结构相同,但三者长度略有差别,此处以Z轴滑台101的结构进行说明,并不再对Y轴滑台102和X轴滑台103的结构进行介绍,其中,Z轴滑台101中包括支撑管101a和驱动件101b,支撑管101a的管体101a-1为长条形的管状,其内部中空,并安装有丝杆101a-2,丝杆101a-2的两端通过轴承安装,因而能够在管体101a-1的内腔转动。驱动件101b中包括驱动电机101b-1和差速器101b-2,二者同轴连接,其中,驱动电机101b-1选用可正转和反转的伺服电机,差速器101b-2用于减缓驱动电机101b-1输出的转速,且驱动电机101b-1通过差速器101b-2与丝杆101a-2的端部相连,驱动丝杆101a-2进行转动。
再进一步的,在Z轴滑台101和Y轴滑台102中还包括连接件101c,而连接件101c具体包括有固定板101c-1和卡块101c-2,结合附图6中所示,卡块101c-2一侧具有连接孔101c-21,且此连接孔101c-21能够配合套接在丝杆101a-2上,卡块101c-2的另一端穿过管体101a-1的侧壁,两侧滑动在管体101a-1侧壁上的导槽101a-11内,且其穿过导槽101a-11的端部连接在固定板101c-1的侧壁上。当丝杆101a-2进行转动时,能够驱动卡块101c-2沿着管体101a-1的长度方向进行移动,而当固定板101c-1被固定时,则通过丝杆101a-2的转动,管体101a-1能够实现移动。Z轴滑台101和Y轴滑台102通过各自的固定板101c-1进行连接。且在Y轴滑台102的端部还固定有安装台102a,安装台102a用于配合安装X轴滑台103。
X轴滑台103中具有连接台103a,连接台103a中包括螺纹管103a-1和连接板103a-2,螺纹管103a-1能够配合套接在X轴滑台103内的丝杆上,螺纹管103a-1的管体固定在连接板103a-2的侧壁上,连接板103a-2则配合固定在安装台102a的台面上,即连接台103a与安装台102a连接于一体,当X轴滑台103中的驱动件101b工作,带动丝杆101a-2转动,X轴滑台103可位于Y轴滑台102上做前后运动。
通过三轴的配合运动,可实现立体空间的三维运动,激光执行元件200安装于X轴滑台103的管体101a-1侧壁上,并位于远离驱动件101b的一端。
在此装置中,还包括有监测单元600,其中包括测距传感器601和光电传感器602,测距传感器601用于测量激光执行元件200与轧辊面的距离,并将距离信号反馈给PLC控制单元500,从而修正激光执行元件200与轧辊面之间的距离;而光电传感器602用于感应三轴滑台100的运动位置,设定起始与终止的位置。两传感器的监测信号均反馈给PLC控制单元500,用于修正运动轨迹,保持自动清理的准确性。
其余结构与实施例1的结构相同。
实施例3
参照图1,为本发明的第三个实施例,提供了一种新型激光打磨轧辊孔型装置的操作方法,采用如实施例1和2中的新型激光打磨轧辊孔型装置,还包括了以下的操作步骤:
将装置移动至轧辊工装存放的位置,根据轧辊型号,在PLC控制单元500中输入相应参数,并启动装置运行;
三轴滑台100运动,Z轴滑台101带动Y轴滑台102和X轴滑台103运行至轧辊中心轴位置,Y轴滑台102带动X轴滑台103运行至轧辊孔面,X轴滑台103带动激光执行元件200向轧辊孔面靠近;
当测距传感器601检测到设定焦距时停止,激光执行元件200开始打磨,除尘设备400开始运行,同时Z轴滑台101和Y轴滑台102根据设定的PLC程序控制激光执行元件200沿着轧辊表面运行;
通过光电传感器602感应三轴滑台100的运动位置,当清理完轧辊相应侧孔面后,将轧辊翻转180,再按照上述步骤清理相对侧的孔面,从而打磨完整的轧辊孔面。
相较于实施例2,进一步的,通过移动平台A将此激光装置移动至轧辊工装的存放位置,通过操作触控屏P输入轧辊的型号,PLC控制单元500计算后,执行相应的程序,并启动三轴滑台100。
具体的,Z轴滑台101带动Y轴滑台102和X轴滑台103运行至轧辊中心轴位置,Y轴滑台102带动X轴滑台103运行至轧辊孔面,X轴滑台103带动激光执行元件200向轧辊孔型表面靠近。当测距传感器601检测到设定焦距时停止,激光执行元件200开始打磨,除尘设备400同步启动运行。而同时Z轴滑台101和Y轴滑台102根据设定的PLC程序控制激光执行元件200沿着轧辊表面运行;过程中,测距传感器601始终监测激光执行元件200与轧辊表面的焦距,并将监测信号反馈给PLC控制单元500,以修正三轴滑台100的运动。
而当X轴滑台103运行至轧辊表面上端时,光电传感器602接收到信号,X轴滑台103带着激光执行元件200向后收回,同时Z轴滑台101开始向下运动;当X轴滑台103后退至初始位置时,激光清洗完同侧的180度孔面,一个扫描周期完成,此时将轧辊翻转180度,重复之前的清理步骤再清理对立侧的孔面。从而打磨完整的轧辊孔面。
其余结构与实施例2的结构相同。
应说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
- 一种新型激光打磨轧辊孔型装置及其操作方法
- 一种孔型轧辊激光表面处理方法