确定飞机的飞行阶段/运动状态的系统和方法
文献发布时间:2023-06-19 10:58:46
本申请要求于2018年8月21日提交的申请号为62/720,610的美国临时申请的优先权。这里引用的外部材料以及其它所有引用的外部材料的全部内容均通过引用并入本文。当通过引用并入的参考文献中术语的定义或用法与本文提供的术语的定义不一致或相反时,以本文提供的该术语的定义为准。
技术领域
本发明的领域是确定飞行器的飞行阶段。
背景技术
背景技术的描述包括可有助于理解本发明的信息。这并不承认本文提供的任何信息是现有技术或与当前要求保护的发明相关,或者明确或隐式地引用的任何专利公开是现有技术。
通常,通过访问飞机数据总线或接收离散信号(例如,车轮重量)来确定飞机是在飞行中还是在地面上。但是,此类解决方案通常仅提供有关飞机是在地面上还是在飞行中的信息,需要访问飞机的数据,并且无法提供飞机在飞行过程中的飞行阶段(例如,上升、巡航和下降)信息。
因此,仍然需要用于确定飞机的飞行阶段的系统和方法。
发明内容
本发明的主题提供了用于确定飞机的飞行阶段的设备、系统和方法。所设想的系统和方法利用第一传感器和第二传感器来获得关于飞机的信息。可以利用第一传感器来检测飞机上或飞机内的振动水平,并生成第一信号。第二传感器可用于检测飞机的俯仰角并生成第二信号。
服务器可以被配置为接收第一信号和第二信号或来自所述第一信号和所述第二信号的信息。使用处理器和一组算法,该处理器可以被配置为使用该组算法以及所接收的第一信号和第二信号来确定飞机的飞行阶段。基于所确定的飞行阶段,所述处理器还可被配置为生成命令信号。
设想的飞行阶段包括例如在登机,滑行、起飞(上升)、巡航和着陆(下降)。
在一些实施例中,可以使用第三传感器,该第三传感器被配置为检测飞机的垂直加速度,并生成第三信号。在这样的实施例中,可以设想的是,服务器可以被配置为接收所述第三信号,并基于第一,第二和第三接收到的信号并使用该组算法来确定飞机的飞行阶段。
可以设想的是,该系统可以包括机载娱乐系统,该机载娱乐系统具有机内无线网络和多个线路可替换单元。优选地,每个线路可替换单元被配置为经由线可替换单元中的显示器向用户呈现内容。可在授予Bird等人的申请号为9015776的美国专利和授予Carswell等人的申请号为10173605的美国专利中找到有关示例性线可替换单元的具体描述。
在一些实施例中,所述服务器可以设置在线路可替换单元中的其中一个线可替换单元内。在这样的实施例中,可以设想的是,在线路可替换单元或传感器发生故障或无法操作的情况下,可以设置多个传感器和服务器,以解决所接收的信号差异问题。
根据优选实施例的具体描述,以及通过参考附图,本发明的主题的不同目的、特征、方面和优点将变得更加显而易见,其中附图中相同的附图标记表示相同的组件。
附图说明
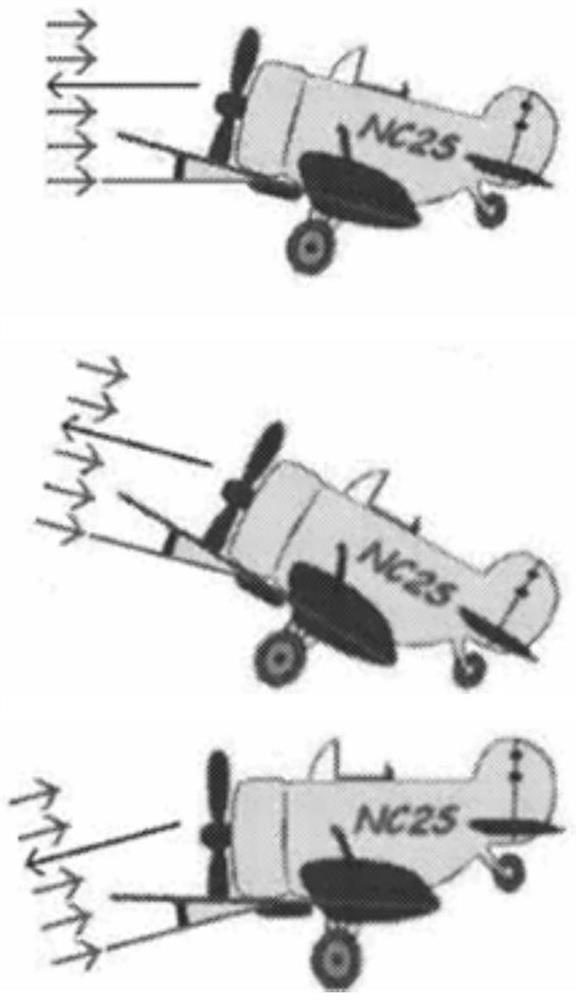
图1A示出了处于巡航飞行阶段的飞机的示例性图。
图1B示出了处于上升飞行阶段的飞机的示例性图。
图1C示出了处于下降飞行阶段的飞机的示例性图。
图2示出了用于确定飞机的飞行阶段的系统的一个实施例。
图3示出了用于确定飞机的飞行阶段的系统的另一实施例。
图4示出了用于确定飞机的飞行阶段的系统的另一实施例。
具体实施方式
在整个以下讨论中,将多次提及服务器,服务,接口,门户,平台或由计算设备形成的其它系统。应当理解,使用这样的术语被认为代表具有至少一个处理器的一个或多个计算设备,该至少一个处理器被配置为执行存储在计算机可读有形非暂时性介质上的软件指令。例如,服务器可以包括以实现所描述的角色,职责或功能的方式用作网络服务器、数据库服务器或其他类型的计算机服务器的一台或多台计算机。
以下讨论提供了本发明主题的许多示例实施例。尽管每个实施例代表发明元素的单个组合,但是也可认为发明主题包括所公开元素的所有可能的组合。因此,如果一个实施例包括元素A、B和C,而第二实施例包括元素B和D,那么即使没有明确地说明,也认为本发明的主题包括A,B,C和D的其他剩余组合。
以下描述包括可有助于理解本发明的信息。这并不是承认本文提供的任何信息是现有技术或与当前要求保护的发明相关,或者明确或隐式地引用的任何专利公开是现有技术。
本发明主题描述了用于自动确定飞机的飞行阶段的系统和方法。示例性飞行阶段可以包括例如在地面上,起飞(上升),巡航和着陆(下降)。该系统和方法允许对现有飞机进行改装,这种操作不是必须的但是是特别优选的,以提供一种解决方案,以自动确定飞机的飞行阶段,例如,机载系统不容易获得此类信息
这样的解决方案可能需要防止在活跃的飞行阶段期间飞机的一个或多个系统出现意外操作的机构。
在一个实施例中,一种用于确定飞机的飞行阶段的系统,包括姿态传感器(例如,俯仰/倾斜),姿态传感器可以确定飞机的俯仰角,从而有助于确定飞机的飞行阶段。这种传感器对于确定飞机的飞行阶段很有用,特别是因为飞机在巡航过程中会上仰,其示例如图1A所示。
这样的系统还可包括振动传感器和/或垂直加速度传感器。根据情况,也可以包括其他商业上合适的传感器。
一方面,机载娱乐系统的线路可更换单元(LRU)可以包括用于自动确定飞机的飞行阶段的设备。在一些实施例中,LRU可以包括具有显示器的计算设备,使得可以经由LRU的显示器向乘客呈现视频和其他内容。在这样的实施例中,设想每个座椅可以具有相关联的LRU,该LRU可布置在座椅靠背、舱壁等中。但是,每个LRU不一定需要包括用于确定飞行阶段的硬件,因为可以想到的是,可以在设备之间共享系统信息。
当然,还可以想到,多个座椅可以共用一个LRU,例如,一排座位或其它组座位共有一个LRU。每个LRU还可包括例如电源插座、数据输入(例如,USB端口)和/或无线收发器。
基于所确定的飞行阶段,LRU可以启用或禁用其某些功能或全部功能和/或向其他LRU、机载娱乐系统的其他组件或飞机的其他组件发送信号以提醒它们确定的飞行阶段。因此,例如,当飞行阶段为“在地面上”、“滑行”和“着陆”中的其中一个时,LRU可能会禁用其无线收发器。例如,LRU还可以禁用相邻的LRU和/或飞机的无线网络。
LRU可以包括姿态传感器和振动传感器,这两种传感器可以一起用于确定飞机是否在飞行中。这样的传感器可以各自向设置在LRU内的处理器发送信号,例如,该处理器可以分析接收到的信号并基于预加载的一组算法和飞机的振动和姿态来确定飞行阶段,预加载的该组算法反映了下表中显示的结果:
*仅振动可能不足以确定巡航期间的飞机飞行阶段,特别是在平静条件下,更是无法确定飞机飞行阶段,因为传感器可能无法检测到任何振动。
**由于空气动力学原因,飞机略微向上倾斜地飞行(非零倾斜)。该俯仰角可通过适当的传感器(例如姿态传感器)进行测量。
在爬升期间,相对于水平方向测得的俯仰/倾斜角将大于在起飞和滑行(例如0度)和巡航期间测得的俯仰/倾斜角。图1B中示出了飞机在爬升(起飞)过程中俯仰/倾斜的示例。
因此,优选的是,算法通过倾斜是否大于预定义的阈值来区分起飞(爬升)和巡航。因此,例如,如果姿态传感器发现飞机的倾斜度小于预定义的阈值,则系统将确定飞机处于“巡航”飞行阶段,并且如果姿态传感器确定飞机的倾斜度大于或等于预定义的阈值,则系统将确定飞机处于“起飞”飞行阶段。
在下降(着陆)期间,相对于水平方向测得的俯仰/倾斜角通常为负(例如,小于起飞和滑行过程中的倾斜角)。图1C示出了飞机在下降(着陆)过程中俯仰/倾斜的示例。
还可以想到,姿态传感器或另一个传感器可以被配置为测量飞机的垂直加速度。以这种方式,即使在飞机在下降期间以零俯仰角飞行的情况下,该系统也可以例如通过检测垂直加速度不为零来确定飞机处于与滑行相反的下降(着陆)飞行阶段。
为了简化系统的安装,可以将预期的系统配置为自校准。例如,可以将系统配置为在打开系统电源时,系统测量每个传感器的基线值。然后,可以将系统配置为将每个基线值存储为该传感器的基线值,并将该值与“在地面上”或在登机的飞机相关联。
另外,为了防止系统出现意外关闭或无法操作的情况,例如在飞行过程中系统上电的情况,可以想到的是,可以将系统配置为存储基线值的历史记录,然后消除任何异常值(例如,异常值与存储的值或其平均值或中间值相差特定范围)。
图2示出了用于确定飞机的飞行阶段的系统200的一个实施例的图。系统200可以包括第一传感器220,该第一传感器220被配置为检测飞机上或飞机内的振动水平,并生成第一信号。设想的第一传感器包括例如振动计和加速度计。
系统200可以包括第二传感器222,该第二传感器222被配置为检测飞机的俯仰角,并生成第二信号。设想的第二传感器包括例如陀螺仪或姿态指示器或惯性参考单元。
系统200还可包括具有处理器212的服务器210,该服务器212被配置为接收第一信号和第二信号并使用一组算法并基于所接收的第一信号和第二信号来确定飞机的飞行阶段。优选地,处理器212还可被配置为基于所确定的飞行阶段来生成命令信号。
如上所述,设想的飞行阶段包括例如在登机、滑行、起飞(上升)、巡航和着陆(下降)。
在一些实施例中,处理器212被配置为当第一信号指示非零振动水平并且第二信号指示俯仰角等于零时,确定飞行阶段为“滑行”。处理器212还可被配置为当第一信号指示非零振动水平并且第二信号指示俯仰角大于零,并且其中俯仰角大于预定义的阈值时,确定飞行阶段是“起飞”。
处理器212还可被配置为当第一信号指示非零振动水平并且第二信号指示俯仰角大于零并且其中俯仰角小于预定义的阈值时,确定飞行阶段是“巡航”。处理器212还可被配置为当第一信号指示非零振动水平并且第二信号指示俯仰角小于零时,确定飞行阶段是“着陆”。
在一些实施例中,处理器212可以被配置为在系统断电之后当处理器212接收到电力时从第一传感器220和第二传感器222中的每一个中请求初始传感器信息。在这样的实施例中,处理器212还可被配置为基于从第一传感器和第二传感器接收的初始传感器信息来计算并分配针对振动的预定义的阈值和针对俯仰的预定义的阈值。
因此,例如,当系统200最初通电时,例如当飞机在登机或在登机附近时,处理器212可以请求或接收来自传感器220、222的初始读数,由于飞机不动且在地面上,该初始读数应指示飞机为零振动,且飞机为零倾斜。然后可以将这些值分配给预定义的阈值,以供以后计算飞机的飞行阶段时使用。可以想到的是,可以将初始读数保存为一组以供参考,使得该组初始读数中的某个范围外的任何初始读数都可忽略不计。这可以避免系统200在飞行过程中重新通电的情况,这可能导致产生一组不基于地面测量值的预定义的阈值。
处理器212生成的命令信号可用于打开或关闭飞机的一个或多个组件,包括,例如,机载娱乐系统的机内无线网络225和一个或多个线路可替换单元230A、230B。替代地或额外地,命令信号可以限制或启用这些或其他组件的一些或全部功能,例如以在飞机处于特定飞行阶段时禁止某些用途。
图3示出了用于确定飞机的飞行阶段的系统300的一个实施例的图。系统300可以包括(i)第一传感器320,该第一传感器被配置为检测飞机上或飞机内的振动水平,并生成第一信号,以及(ii)第二传感器322,该第二传感器被配置为检测飞机的俯仰角,并生成第二信号。
系统300与上述系统200相似,除了系统300可以包括第三传感器324,第三传感器被配置为检测飞机的垂直加速度并产生第三信号。
系统300还可包括具有处理器312的服务器310,该服务器312被配置为接收第一,第二和第三信号,并使用一组算法并基于所接收的第一,第二和第三信号来确定飞机的飞行阶段。优选地,处理器312还可以被配置为基于所确定的飞行阶段来生成命令信号。
如上所述,设想的飞行阶段包括例如在登机、滑行、起飞(上升)、巡航和着陆(下降)。
在一些实施例中,处理器312被配置为当第一信号指示非零振动水平并且第二信号指示俯仰角等于零时,确定飞行阶段为“滑行”。处理器312还可被配置为当第一信号指示非零振动水平并且第二信号指示俯仰角大于零,并且其中俯仰角大于预定义的阈值时,确定飞行阶段是“起飞”。
处理器312还可被配置为当第一信号指示非零振动水平并且第二信号指示俯仰角大于零并且其中俯仰角小于预定义的阈值时,确定飞行阶段是“巡航”。处理器212还可被配置为当第一信号指示非零振动水平,第二信号指示俯仰角小于零时,且第三信号指示飞机的垂直加速度时,确定飞行阶段是“着陆”。
在一些实施例中,处理器312可以被配置为在系统断电之后处理器312接收到电力时,从第一,第二和第三传感器320、322、324中的每一个钟请求初始传感器信息。在这样的实施例中,处理器312还可被配置为基于从第一,第二和第三传感器320、322、324接收的初始传感器信息来计算并分配针对振动和俯仰的预定义的阈值和针对垂直加速度的初始值。
因此,例如,当系统300最初通电时,例如当飞机在登机或在登机附近时,处理器312可以请求或接收来自传感器320、322、324的初始读数,由于飞机未动且在地面上,因此这些初始读数指示飞机未振动,无倾斜且无垂直加速度。然后可以将这些值分配给预定义的阈值,以供以后计算飞机的飞行阶段时使用。可以想到的是,可以将初始读数保存为一组以供参考,使得该组初始读数中的某个范围外的任何初始读数都可忽略不计。这可以避免系统300在飞行过程中重新通电的情况,这可能导致产生一组不基于地面测量值的预定义的阈值。
处理器312生成的命令信号可用于打开或关闭飞机的一个或多个组件,包括,例如,机载娱乐系统的机内无线网络325和一个或多个线路可替换单元330A、330B。替代地或替代地,命令信号可以限制或启用这些或其他组件的一些或全部功能,例如以在飞机处于特定飞行阶段时禁止某些用途。
图4示出了配置成确定飞机的飞行阶段的机载娱乐系统400的另一实施例的图。系统400可以包括多个线路可替换单元430A-430N。如上所述,线路可替换单元430A-430N中的每一个可以包括与计算设备耦合的显示器,由此内容可呈现在显示器上。
一个或多个线路可替换单元430A可以包括具有处理器412的服务器410,该处理器412被配置为从与服务器410通信耦合的第一传感器420接收第一信号。优选地,第一传感器420被配置为检测飞机上或飞机内的振动水平,并生成第一信号。
处理器412还可被配置为从与服务器410通信耦合的第二传感器422接收第二信号。优选地,第二传感器422被配置为检测飞机的俯仰角,并生成第二信号。
处理器412还可被配置为使用一组算法并基于所接收的第一和第二信号来确定飞机的飞行阶段。优选地,处理器412还可被配置为基于所确定的飞行阶段来生成命令信号。
可以将命令信号发送到机载娱乐系统400的一个或多个组件,以打开或关闭一个或多个组件。在一些实施例中,当飞机的飞行阶段处于登机、起飞或着陆时,可以关闭一个或多个组件的电源。示例性组件可以包括线路可替换单元(例如,430B-430N)、电源、无线网络425等。
在一些实施例中,第一传感器420和第二传感器422可以设置在线路可替换单元430A内。
可以想到的是,处理器412还可被配置为生成第二命令信号,以使机内无线网络425和多个线路可替换单元430A-430N中的至少一个基于所确定的飞行阶段而断电。
在一些实施例中,处理器412被配置为当第一信号指示非零振动水平并且第二信号指示俯仰角等于零时,确定飞行阶段为“滑行”。处理器412还可被配置为当第一信号指示非零振动水平并且第二信号指示俯仰角大于零,并且其中俯仰角大于预定义的阈值时,确定飞行阶段是“起飞”。
处理器412还可被配置为当第一信号指示非零振动水平并且第二信号指示俯仰角大于零并且其中俯仰角小于预定义的阈值时,确定飞行阶段是“巡航”。处理器412还可被配置为当第一信号指示非零振动水平,第二信号指示俯仰角小于零时,确定飞行阶段是“着陆”。
在一些实施例中,处理器412可以被配置为在系统断电之后处理器412接收到电力时,从第一和第二传感器420、422中的每一个钟请求初始传感器信息。在这样的实施例中,处理器412还可被配置为基于从第一和第二传感器接收的初始传感器信息来计算并分配针对振动的预定义的阈值和针对俯仰角的预定义的阈值。
因此,例如,当系统400最初通电时,例如当在登机或在登机附近时,处理器412可以请求或接收来自传感器420、422的初始读数,由于飞机未动且在地面上,因此这些初始读数指示飞机未振动,无倾斜。然后可以将这些值分配给预定义的阈值,以供以后计算飞机的飞行阶段时使用。可以想到的是,可以将初始读数保存为一组以供参考,使得该组初始读数中的某个范围外的任何初始读数都可忽略不计。这可以避免系统400在飞行过程中重新通电的情况,这可能导致产生一组不基于地面测量值的预定义的阈值。
如本文的说明书和随后的权利要求中所使用的,除非上下文另有明确规定,否则“一”,“一个”和“该”的含义包括复数指代。此外,如在本文的描述中所使用的,除非上下文另有明确规定,否则“在…中”含有包括“在…内”和“在…上”。
如本文所用,并且除非上下文另有明确规定,否则术语“连接到”旨在包括直接连接(其中两个彼此连接的元件彼此接触)和间接连接(其中至少一个另外的元件位于两个元件之间)。因此,术语“连接到”和“与…连接”同义使用。
对本文公开的本发明的替代元件或实施例的分组不应被解释为限制。可以单独提及和保护每个组成员,或者可以将每个组成员与本文中发现的组中的其它成员或其它元件进行任意组合来进行保护。出于方便和/或获得专利的原因考虑,可以将一个或多个组成员包含在组中或从组中删除。当出现任何这样的包含或删除时,本说明书在此被认为包含经修改的组,从而实现所附权利要求中使用的所有马库什组的书面描述。
在一些实施例中,用于描述和要求保护本发明的某些实施例的表示成分的数量,诸如浓度、反应条件等性质的数字应理解为在某些情况下由术语“约”修饰。因此,在一些实施例中,在书面描述和所附权利要求书中阐述的数字参数是近似值,其可以根据特定实施例试图获得的期望特性而变化。在一些实施例中,应该根据报告的有效数字的数目并通过应用普通的舍入技术来解释数字参数。尽管说明本发明的一些实施例的广泛范围的数值范围和参数是近似值,但是在具体示例中列出的数值应以尽可能精确地方式报告。在本发明的一些实施例中呈现的数值可能包含某些误差,这些误差必定是由它们各自的测试测量中的标准偏差导致的。
除非上下文指示相反的情况,否则本文阐述的所有范围应解释为包括其端点,并且开放式范围应解释为仅包括商业上可行的值。同样,除非上下文指示相反的情况,否则所有值列表都应视为包括中间值。
本文中数值范围的列举仅旨在用作一种便捷的方式,用来分别指代该范围内的每个单独的值。除非本文另外指出,否则将范围内的每个单独的值并入说明书中,就如同其在本文中单独列举一样。除非本文另外指出或与上下文明显矛盾,否则本文描述的所有方法可以以任何合适的顺序执行。针对本文的某些实施例提供的任何和所有示例或示例性语言(例如“诸如”)的使用仅旨在更好地阐明本发明,并且不对以其他方式要求保护的本发明的范围构成限制。说明书中的任何语言都不应解释为表示对实施本发明必不可少的任何未要求保护的要素。
对本文公开的本发明的替代元件或实施例的分组不应被解释为限制。可以单独提及和保护每个组成员,或者可以将每个组成员与本文中发现的组中的其它成员或其它元件进行任意组合来进行保护。出于方便和/或获得专利的原因考虑,可以将一个或多个组成员包含在组中或从组中删除。当出现任何这样的包含或删除时,本说明书在此被认为包含经修改的组,从而实现所附权利要求中使用的所有马库什组的书面描述。
对于本领域的技术人员而言显而易见的是,在不背离本文的发明构思的前提下,除了已经描述的修改之外,还可以进行更多的修改。因此,本发明的主题除了受到所附权利要求的精神限制之外,并不受其它限制。此外,在解释说明书和权利要求书时,应以与上下文一致的尽可能广泛的方式解释所有术语。尤其是术语“包括”和“包含”应解释为以非排他性的方式涉及元件、组件或步骤,表明可以同时存在或同时使用提及的元件、组件或步骤可未明确提及的元件、组件或步骤,或者提及的元件、组件或步骤可与未明确提及的元件、组件或步骤组合。在说明书和权利要求书涉及选自以下组中的至少其中一种时,组中包括A,B,C…和N,应将文本解释为仅要求来自组中的一个元件,而不是A加B,或B加N等。
- 确定飞机的飞行阶段/运动状态的系统和方法
- 用于飞机的安全空中走廊宽度的确定方法和装置以及确保飞机自动低空飞行的方法和系统