基于微机电数字传感技术的倾斜测量系统及测量方法
文献发布时间:2023-06-19 11:02:01
技术领域
本发明涉及一种倾斜测量系统及方法,尤其涉及一种基于微机电数字传感技术的倾斜测量系统及测量方法。
背景技术
角度测量作为一种几何计量技术,在生活随处可见应用。在实际工程中最常见的就是机械式角度测量仪,如:万能角度尺、水平尺等,随着科学发展和测量技术的进步,角度测量方式也由最初的机械式测量不断更新,出现了电磁式、光学式和物理传感器等多种测量方式。
但是,其中光学设备的特点是精度较高、体积大、价格昂贵、操作性较差,物理的设备通常依赖于传感器的测量精度、解算算法和误差补偿修正技术。同时在对待测量的精度,测量的角度范围,设备大小规格,长期工作要求等往往没有合适的设备。
因此,本发明致力于提供一种通用的设备,具有功耗低,体积小,重量轻,成本低,可靠性高等优势。
发明内容
本发明的上述目的是通过以下技术方案实现的:
一种基于微机电数字传感技术的倾斜测量系统,包括:外壳,其中,外壳内安装有微控制处理模块,所述微控制处理模块上连接有数传模组、MEMS传感器。
如上所述的基于微机电数字传感技术的倾斜测量系统,其中,还包括:安装在所述壳体内的电源供电模块,所述电源供电模块连接所述微控制处理模块、所述数传模组、所述MEMS传感器。
如上所述的基于微机电数字传感技术的倾斜测量系统,其中,所述MEMS传感器采用cmos工艺的数字IC。
如上所述的基于微机电数字传感技术的倾斜测量系统,其中,所述数传模组采用NB-IoT技术,与网络运营商的基础设备通过无线电通信协议建立通信。
如上所述的基于微机电数字传感技术的倾斜测量系统,其中,所述数传模组集成有:BeiDou、GPS、GLONASS*定位和导航系统。
一种基于微机电数字传感技术的倾斜测量方法,其中,包括:
步骤1:电源供电模块供电,进行初始化操作;
步骤2:MEMS传感器工作采集加速度数据;
步骤3:对加速度数据进行数据滤波;
步骤4:对加速度数据进行运算获取倾斜量数据;
步骤5:微控制处理模块通过数传模组将倾斜量数据发送。
如上所述的基于微机电数字传感技术的倾斜测量方法,其中,电源供电模块供电后执行自动校准及滤波,包括:
步骤1.1:对原始数据进行线性校准;
步骤1.2:进行机械滤波;
步骤1.3:进行归一化运算。
如上所述的基于微机电数字传感技术的倾斜测量方法,其中,步骤4之后进行温度补偿,包括:实时获取MEMS传感器温度数据进行温度补偿;步骤4完成后,微控制处理模块控制唤醒数传模组,之后进行步骤5。
如上所述的基于微机电数字传感技术的倾斜测量方法,其中,对加速度数据进行运算包括:
AccXY=sqrt(AccX
α=atan2(AccXY,AccZ)
如上所述的基于微机电数字传感技术的倾斜测量方法,其中,进行归一化运算包括:对N个样本进行平均处理,RMS=ND*sqrt(BW*c)。
综上所述,由于采用了上述技术方案,本发明设备成本较低,可以便捷的进行长期监测静态或者低速环境下的倾斜角度,通过计算与重力加速度之间的数学关系得到待测平面与水平面之间的倾斜角度。配合数传模组,实现了倾斜角度数据的传输。本发明具有功耗低,体积小,重量轻,成本低,可靠性高,测量范围广,精度高的优点。
附图说明
图1是本发明基于微机电数字传感技术的倾斜测量系统的滤波数据对比图;
图2是本发明基于微机电数字传感技术的倾斜测量系统的结构框图;
图3是本发明基于微机电数字传感技术的倾斜测量系统的数传模组结构示意图;
图4是本发明基于微机电数字传感技术的倾斜测量方法的加速度计算角度原理图;
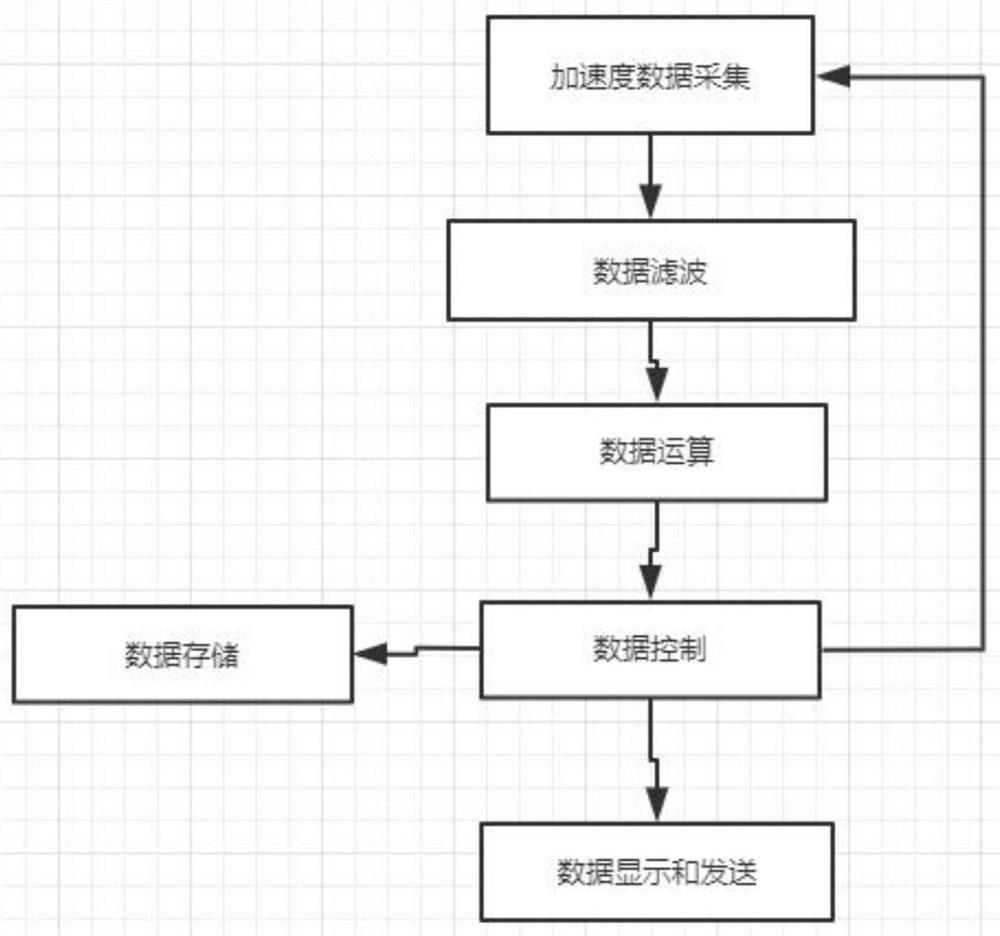
图5是本发明基于微机电数字传感技术的倾斜测量方法的传感数据流程图;
图6是本发明基于微机电数字传感技术的倾斜测量方法的数据校准及滤波流程图;
图7是本发明基于微机电数字传感技术的倾斜测量方法的流程图。
具体实施方式
下面结合附图和实施例对本发明做进一步描述:
图2是本发明基于微机电数字传感技术的倾斜测量系统的结构框图,请参见图2,一种基于微机电数字传感技术的倾斜测量系统,包括:外壳1,其中,外壳1内安装有微控制处理模块3,微控制处理模块3上连接有数传模组2、MEMS传感器4。
进一步的,还包括:安装在壳体内的电源供电模块5,电源供电模块5连接微控制处理模块3、数传模组2、MEMS传感器4。
进一步的,MEMS传感器4采用cmos工艺的数字IC。
具体的,MEMS传感器4可以采用:博世mems bma系列,ADI mems ADXL系列。这其中有以下优势:
1、CMOS工艺更加轻便,使用比模拟电路更加低电压,相对功耗更低,使用时间更长。通常模拟IC使用的5V电压,而目前BMA数字芯片可以使用电压1.62V.
2、数字相对模拟芯片具有更简单的设计,不会带来噪音和失真的影响,结果更干净的原始数据。
3、数字相对模拟芯片更新迭代更快,采用最新的设计理念,规模更广泛,相对滤波更简单有效,后端技术更成熟。图1是本发明基于微机电数字传感技术的倾斜测量系统的滤波数据对比图,请参见图1,开启滤波后数据的输出会明显偏好甚至接近0误差。
4、超小尺寸,最小功耗实现工业级的收发灵敏度(23dBm±2dB)及高精确度。
进一步的,数传模组2采用NB-IoT技术,与网络运营商的基础设备通过无线电通信协议建立通信。
具体的,本发明可以采用高性能NB-IoT技术,具有以下优点:
1、覆盖范围是传统网络的100倍,收发效率提升20DB增益;
2、支持长距离和海量的连接设备数量;
3、超低的制造成本(国内低于5美元)。
图3是本发明基于微机电数字传感技术的倾斜测量系统的数传模组结构示意图,请参见图3,进一步的,数传模组2集成有:BeiDou、GPS、GLONASS*定位和导航系统。可实现多系统联合定位,支持多种SBAS信号接收处理,向用户提供快速、准确的高性能定位体验。
本发明分别通过NB-IoT技术,结合多种定位和导航系统,使用低功耗通信技术解决室内外场景下通信和定位难题。能够同时实现倾斜量的测量、室内的通信和定位。
图5是本发明基于微机电数字传感技术的倾斜测量方法的传感数据流程图,请参见图5,本发明还公开了一种基于微机电数字传感技术的倾斜测量方法,其中,包括:
步骤1:电源供电模块5供电,进行初始化操作;
步骤2:MEMS传感器4工作采集加速度数据;
步骤3:对加速度数据进行数据滤波;
步骤4:对加速度数据进行运算获取倾斜量数据;
步骤5:微控制处理模块通过数传模组将倾斜量数据发送。
具体的,步骤4还可以包括,微控制处理模块3进行数据控制,对倾斜量数据进行数据存储、数据显示和发送,可以配套相应的显示屏幕。数传模组2通过NB-IoT技术与网络运营商的基础设备建立通信。将可以倾斜量数据最终发送给网络运营商的服务器。
进一步的,图6是本发明基于微机电数字传感技术的倾斜测量方法的数据校准及滤波流程图,请参见图6,电源供电模块5供电后执行自动校准及滤波,包括:
步骤1.1:对原始数据进行线性校准;
步骤1.2:进行机械滤波;
步骤1.3:进行归一化运算。
进一步的,步骤4之后进行温度补偿,包括:实时获取MEMS传感器4温度数据进行温度补偿;步骤4完成后,微控制处理模块3控制唤醒数传模组2,之后进行步骤5。
由于本发明采用了基于微硅加工工艺制成的器件,使得其特性受到温度的影响,测量实时数据做温度系数补偿。
进一步的,对加速度数据进行运算包括:
AccN=sqrt(AccX
AccXY=sqrt(AccX
α=atan2(AccXY,AccZ)
具体的,图4是本发明基于微机电数字传感技术的倾斜测量方法的加速度计算角度原理图,请参见图4,加速度计测量重力向量在感应轴上的映射。被测加速度的振幅随感应轴与水平面的夹角α的正弦值的变化而变化。
本发明默认采用东北天坐标系(ENU),假如系统水平放置,它将报告AccX=0g,AccY=0g,AccZ=+1g。Acc(Acceleration加速度),这时重力轴符号是正的。
具体的,本发明中:
α:倾斜角度,也就是弧度值;AccX为加速度传感在x轴,也就是东向轴方向的读数;AccY为加速度传感在y轴,也就是北向轴方向的读数;AccZ为加速度传感在z轴,也就是重力轴方向的读数。AccXY为归一算法计算的变量值,也就是重力轴在z轴投影值,用于倾斜角度计算。AccN为归一算法所有变量。
当加速度计向任意方向倾斜时,重力矢量沿Z轴的投影减小,而沿X轴和Y轴的投影在正负方向角度增加减。变化量在数学上可由弧度转换为倾斜角度。
具体的,在本发明的计算过程中,本发明的倾斜于Z轴的运动是无关,是重力矢量于Z的轴的夹角,与其他两轴相关。
利用余弦定义:AccZ=1g×cos(α),其中“α”是倾斜角;
利用正玄定义:AccXY=1g×sin(α)其中AccXY=+sqrt(AccX
利用正切定义:tan(α)=sin(α)/cos(α)=AccXY/AccZ;
利用如上定义根据其他两轴矢量就可得到倾斜角度的计算,可以下列出计算公式:
α=arccos(AccZ/1g)输出范围为0到180度;
α=arcsin(AccXY/1g)输出范围是-90到+90度;
α=arctan(AccXY/AccZ)输出范围是-90到+90度;
α=arctan2(AccXY,AccZ)输出范围为-180至+180度。
通过以上罗列可以看出atan2具有角度范围广,表现灵敏均衡,抗干扰更突出的诸多优点,因此,本发明采用atan2得到全范围,最佳精度的结果。
进一步的,进行归一化运算包括:对N个样本进行平均处理sqrt(N),RMS=ND*sqrt(BW*c)(ND噪声密度,BW采集带宽,c常数)。频率越高,效率越好,有效降低RMS噪声。
图7是本发明基于微机电数字传感技术的倾斜测量方法的流程图,请参见图7,在本发明的一个实施例中,本发明还可以在电源供电模块5供电(上电)操作后,进行初始化操作,设备初始化的自校准操作。有效消除安装误差与器件的偏移噪声误差,包括:AOUT[g]=AOFF+(Gain×AACTU)(AACTU原始值,Gain常数,AOFF自校准获取值),之后进行数据解算(步骤2~5),微控制处理模块3进行系统控制,唤醒通信外设(数传模组2),完成发送数据的操作后,微控制处理模块3控制数传模组2进行系统休眠。
进一步的,本发明的微控制处理模块3还可以获取定位数据,定位数据可以通过数传模组2与倾斜量数据一并发送给网络运营商的基础设备。
本发明具体可以应用到:1、水库大坝安全检测;2、高空平台安全保护;3、高速公路阻拦坡倾斜监测;4、城墙安全监测;5、工农业工程机械设备倾斜监测;6、重要货物倾斜监测。
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员可以无需创造性劳动或者通过软件编程就可以根据本发明的构思做出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
- 基于微机电数字传感技术的倾斜测量系统及测量方法
- 基于数字微镜的大动态激光远场焦斑测量系统及测量方法