基于正系统的城市交通建模和事件触发非脆弱控制方法
文献发布时间:2023-06-19 11:14:36
技术领域
本发明属于自动化技术与现代控制领域,涉及一种基于随机正系统的城市交通系统的建模和事件触发非脆弱控制方法。
背景技术
在基础设施建设和科技成果转换的推动下,我国近年来交通基础设施和出行需求都成倍增长,交通系统持续快速发展。城市道路交通系统主要由路网系统、交通流、交通监测和控制系统构成。作为由无数个体构成的宏观系统,城市道路交通系统具备包括高度随机性、不均衡性、不确定性在内的复杂动态系统的一系列特征。这对我们研究城市道路交通系统带来了不小的挑战。
城市交通治理是城市发展的重要基石,也是城市文明和经济发展的重要表征。但是城市规模的急剧扩张以及以小汽车为主导的出行方式给城市交通治理带来了巨大的挑战,特别是城市交通拥堵带来的一系列负面问题。为解决城市交通拥堵和事故频发等问题,我们首先通过以城市道路网络节点处车流量为研究对象,建立状态空间描述的车辆驶入和驶出系统模型。考虑到系统的状态变量总是非负的和道路交叉口交通信号灯的切换,正马尔科夫跳变系统被用来刻画城市道路交通系统。城市道路交通系统具有相对的稳定性,比如基础设施、网络布局成型后,一般情况下不会去改变,居民的出行需求在一定的时期内也不会发生太大变化,在出行量、出行结构、出行分布上具有相对稳定性。但是这种稳定是一种脆弱的稳定,随时可能受到交通信号灯故障或其他突发状况影响,引发拥堵,且拥堵会迅速破坏稳定系统,快速蔓延、传播。对于这些由于执行元件故障导致的系统不稳定,非脆弱控制方法可以通过设计合适的控制律,保障系统在执行器故障的情况仍可以安全平稳运行。事件触发控制事件通过设计事件触发条件,避免系统执行不必要的采样,从而达到减轻通信负担和避免资源浪费的目的。
针对上述问题,本发明利用现代控制理论技术建立城市道路交通系统的状态空间模型,基于事件触发策略的基础上,为系统设计了非脆弱控制器,分析其正性和稳定性,使城市交通控制系统保持安全稳定运行。综上,设计一种基于随机正系统的城市交通控制系统的建模和事件触发非脆弱控制方法具有重要意义。
发明内容
本文的目的是针对城市道路交通系统的拥堵和交通信号灯故障等突发状况对交通系统的影响,通过对城市交通系统的建模,提供了一种基于随机正系统的城市交通系统的事件触发非脆弱控制方法。
本发明方法的具体步骤包括如下:
步骤1、建立城市交通控制系统的随机正系统状态空间模型,具体方法是:
1.1对实际交通网络进行描述
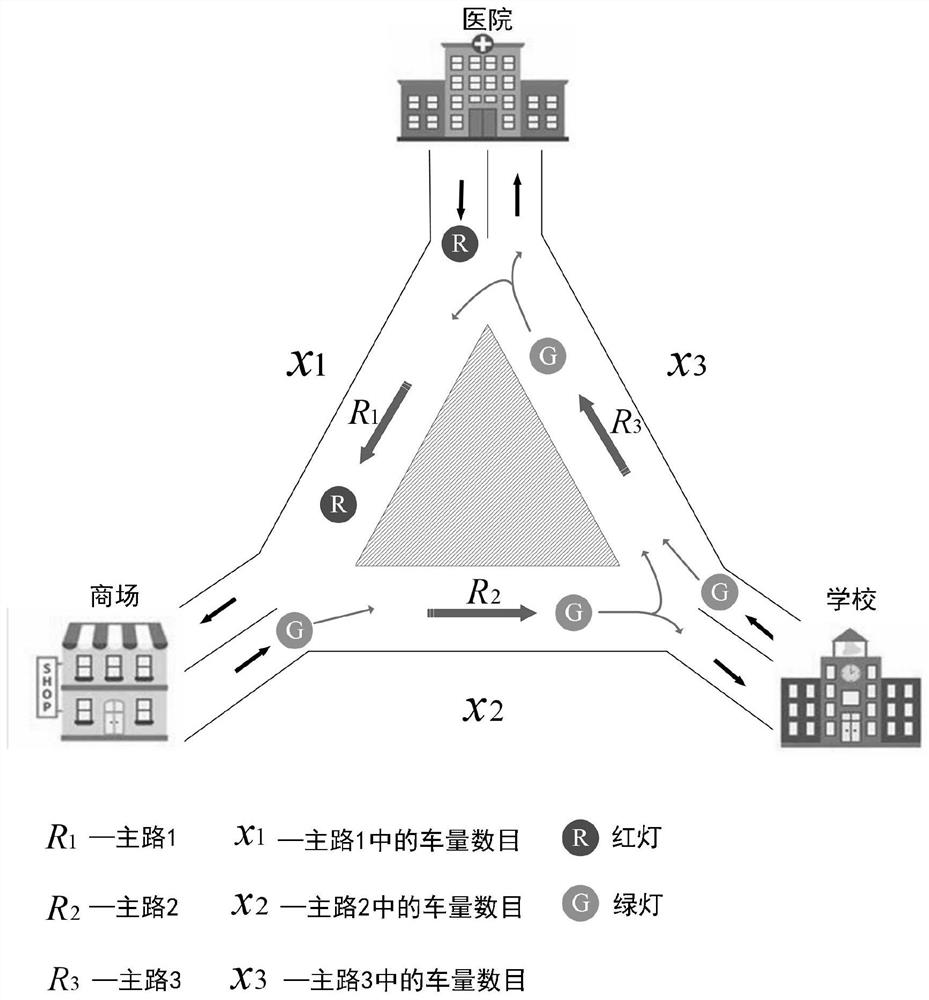
考虑城市道路交通系统环形路口(三角环形)。一个道路交通系统的三角环形路口通常由三条主路和用于疏导车流量的交通指示灯组成,见图1(见说明书附图1)。图1展示了交通系统环形路口各交通元素间的联系,并显示了每条道路车辆的行驶方向(R
1.2利用上述描述建立城市交通控制系统的状态空间模型:
其中,
跳变过程g(t)的转移概率满足以下条件:
其中,对于i≠j,Δ>0,
步骤2、建立城市交通控制系统的事件触发控制,其构建形式如下:
设t
其中,
给定事件触发条件为:
其中,0<β<1,β为所建立的事件触发条件的阀值。
步骤3、设计城市交通控制系统的非脆弱控制器,其构建形式如下:
3.1设计带有执行器不确定的非脆弱控制器:
其中,ΔK
3.2执行器故障被描述为:
其中,
3.3城市交通控制系统在执行器故障情况下平稳运行的条件如下:
设计常数μ>0,γ>0,
成立,其中,
所述的城市交通控制系统是正的且稳定的。这里的向量v
步骤4、城市交通系统的正性验证过程如下:
4.1给定初始状态
那么,城市交通控制系统可以被写作:
因此,可以得到
4.2结合步骤3.3中的控制器增益矩阵设计和执行器故障矩阵H
4.3由于
由矩阵论相关知识得出下式是一个梅兹勒矩阵,
进而,下式也是一个梅兹勒矩阵:
定义一组指标:
4.4由于x
步骤5、城市交通控制系统的随机稳定性的验证过程如下:
5.1选择线性随机余正李雅普诺夫函数V(x(t),g(t)=i)=x(t)
5.2由步骤4.4可知
从步骤3.3中所设计的约束条件很容易得出
5.2由于
5.3利用步骤5.1和步骤5.2,得到
其中,ΓV(x(t),g(t)=i)为若无穷小算子,意味着对所选取的Lyapunov 函数V(x(t),g(t)=i)求在t时刻的导数运算。
通过步骤3.3中的约束条件,这意味着
ΓV(x(t),g(t)=i)≤-μx
运用邓金公式,我们有
其中,E{·}为求期望算子。
由于E{V(x(t),g(t)=i)}>0,得到
本发明的有益效果如下:
本发明方法通过考虑城市交通系统中驶入车辆量过大导致交通拥堵和交通信号灯故障等问题,利用正马尔科夫跳变系统建立城市交通系统的状态空间模型。借助一个线性随机余正李雅普诺夫函数设计出一种带有执行器故障的城市交通系统的非脆弱控制器,可以有效改善解决城市交通系统中突发事故带来的道路拥堵问题。基于事件触发机制,设计了事件触发非脆弱控制器,降低了系统设计成本,保证城市交通控制系统安全稳定运行。
附图说明
图1为本发明交通系统环形路口示意图。
具体实施方式
下面结合具体实施例来对本发明进行进一步说明,但并不将本发明局限于这些具体实施方式。本领域技术人员应该认识到,本发明涵盖了权利要求书范围内所可能包括的所有备选方案、改进方案和等效方案。
本实施方式提供了一种基于随机正系统的城市交通控制系统的非脆弱事件触发控制方法,其具体步骤如下:
步骤1、构建城市交通控制系统的随机正系统状态空间模型;
步骤2、构建城市交通控制系统的事件触发控制条件;
步骤3、设计城市交通控制系统的非脆弱控制器;
步骤4、验证基于非脆弱控制器所构建城市交通控制系统的正性;
步骤5、验证城市交通控制系统的随机稳定性。
进一步的,步骤1中城市交通系统的正系统状态空间模型的构建,实现如下:
1.1对实际交通网络进行描述
我们考虑城市道路交通系统环形路口(三角环形)。一个道路交通系统的三角环形路口通常由三条主路和用于疏导车流量的交通指示灯组成,见图1(见说明书附图1)。图1展示了交通系统环形路口各交通元素间的联系,并显示了每条道路车辆的行驶方向(R
1.2利用上述描述建立城市交通控制系统的状态空间模型:
其中,
其中,对于i≠j,Δ>0,
进一步的,步骤2构建城市交通控制系统的事件触发控制条件,实现如下:
设t
其中,
给定事件触发条件为:
其中,0<β<1。
进一步的,步骤3中设计城市交通控制系统的非脆弱控制器,其构建形式如下:
3.1设计带有执行器不确定的非脆弱控制器:
其中,ΔK
3.2控制器故障被描述为:
其中,H
3.3城市交通控制系统在执行器故障和输入饱和情况下平稳运行的约束条件设计,如下:
设计常数μ>0,γ>0和n维向量
对于
在非脆弱可靠控制器
所述的交通控制系统是正的且是随机稳定的;此外,对于满足 x(t
进一步的,步骤4中的正性验证过程如下:
4.1给定初始状态
4.2通过
4.3结合步骤3.3中的约束条件和步骤3.2的故障矩阵H
4.4由于
由矩阵论相关知识矩阵(19)是一个梅兹勒矩阵,
进而,矩阵(20)是一个梅兹勒矩阵:
随后可知,系统矩阵(21)是一个梅兹勒矩阵:
其中
进一步的,步骤5中随机稳定性的验证过程如下:
5.1选择线性随机余正李雅普诺夫函数V(x(t),g(t)=i)=x(t)
由步骤4.1可知:
5.2考虑
由于
那么,步骤5.1被写成:
5.3对于
然后可以推导出
5.4对于
因此,
5.5将步骤3.3代入步骤5.2-5.4,得到:
ΓV(x(t),i)≤-μx
那么,
公式(31)意味着所述的城市交通化控系统是随机稳定的;
5.6最后将展示集合
- 基于正系统的城市交通建模和事件触发非脆弱控制方法
- 基于正切换系统建模的网络化系统非脆弱事件触发控制方法