一种基于后向轨迹模式的探索城市大气污染物来源的方法
文献发布时间:2023-06-19 11:32:36
技术领域
本发明属于信息化领域,涉及一种基于后向轨迹模式的探索城市大气污染物来源的方法。
背景技术
HYSPLIT后向轨迹模型是一种用于计算和分析大气污染物输送、扩散轨迹的专业模型,广泛应用于气象学界研究目标地区污染物来源分布及传输特征。
随着发展水平的快速提升,区域性、复合型大气污染问题凸现。各个城市群资源能源消耗巨大,大气污染物排放集中,重污染天气在区域内大范围同时出现,呈现明显的区域性特征。通过使用后向轨迹模型生成气团后向轨迹,结合多个维度信息进行可视化分析,了解和跟踪目标城市的大气污染物来源及受污染水平。对建立区域大气污染联防联控机制具有指导意义。
发明内容
有鉴于此,本发明的目的在于提供一种基于后向轨迹模式的探索城市大气污染物来源的方法。针对HYSPLIT模型的实验结果缺乏时间信息以及还没有针对某个城市的污染物来源进行可视分析的问题,本发明提出的基于后向轨迹模型研究某城市大气污染物来源的可视分析方法,以某市为研究对象,构建污染物传输模型,以可视化的方式呈现在时间和空间维度上呈现污染物来源,为大气污染防治和联防联控机制的建立提供建议。
为达到上述目的,本发明提供如下技术方案:
一种基于后向轨迹模式的探索城市大气污染物来源的方法,该方法包括如下步骤:
S1:研究数据的获取以及处理;
确定需要研究的时空范围,获取时空范围内的空气质量监测数据和气象数据;
对空气质量监测数据进行预处理
S2:基于HYSPLIT后向轨迹模型构建污染物传输模型,生成气团后向轨迹,根据气团轨迹发现目标城市污染物来源;
S3:筛选出到达目标城市的气团后向轨迹,基于FP-growth算法挖掘频繁污染源;
S4:基于空气质量数据和气团后向轨迹数据构建一个可视分析系统,从多个维度直观进行可视分析;
使用饼图和柱状图交互分析的方式展示在查询的时间范围内,区域的空气质量时空分布特征;
地图直观展示在特定时间的气团后向轨迹,帮助用户快速识别污染物来源;
折线图展示在查询的时间范围内,污染物IAQI值随着时间的变化趋势。
可选的,在所述步骤S1中,确定需要研究的目标城市为某市,时间范围为2019年1月1日至2019年12月31日,地理范围为西经103度-东经115度,南纬26度-北纬32度;
可选的,在所述步骤S1中,气象数据为ERA5-land再分析数据集,时间分辨率为1小时,空间分辨率为0.1°×0.1°,每条数据格式为(时间,经度,纬度,风速U分量,风速V分量)。空气质量数据为2019年1月1日至2019年12月31日,122个空气质量监测站点的大气污染物浓度逐时监测值及AQI小时值;
可选的,在所述步骤S1中,对空气质量数据进行的预处理包括清洗去噪,针对污染物浓度监测缺失值采用普通克里金插值,具体包括以下操作:
将空气质量监测站点表示为空间一点(x,y),x表示该站点的经度,y表示该站点的维度。各项污染物浓度监测值为该站点的一项空间属性z。假设空间属性z是均一的,对于空间任意一点(x,y),都有同样的期望c与方差σ
其中
对于站点(x
λ
进一步地,权重系数λ
定义半方差函数r
半方差函数表达了空间属性间的相似度。根据地理学第一定律,空间上相近的事物关联更为紧密。故用两点之间的距离d
r=r(d)#(6)
对于任意两点(x
将半方差函数代入(4)中,得到一组关于权重系数λ
对矩阵求逆即可求解出权重系数λ
可选的,在所述步骤S1中,采用中国环境保护部发布的HJ633-2012《环境空气质量指数(AQI)技术规定(试行)》计算各项污染物(PM2.5、PM10、SO
可选的,在所述步骤S2中,根据HYSPLIT后向轨迹模式构建污染物传输模型,计算气团后向轨迹,具体包括以下步骤:
(1)从ERA5-Land再分析数据集中获取气团所在初始位置P(t)的初始风速V(P,t),若该位置P(t)的风速V(P,t)为未知量,则对于风速分量U
首先,将研究的地理范围划分成分辨率为0.1°×0.1°的网格,使用半正矢公式(haversine公式)计算出未知点P(t)到所在网格四个网格点
其次,对每个网格点
最后,分别计算U分量和V分量的插值结果,公式如下:
V(P,t)=[V
其中
(2)根据初始速度V(P,t),及时间步长Δt,计算气团到达的第一猜值点P′(t+Δt),公式为:
P′(t+Δt)=P(t)+V(P,t)Δt#(11)
根据气团运动距离
(3)用步骤(1)的方法得到第一猜值点P′(t+Δt)处的风速V(P′,t+Δt),用公式(13)计算气团在t+Δt时刻到达的位置P(t+Δt),如下所示:
P(tΔt)=P(t)+0.5[V(P,t)+V(P′,t+Δt)]Δt#(13)
此时风速U分量为气团初始风速V(P,t)和第一猜值点出风速V(P′,t+Δt)的U分量的均值,V分量同理。根据公式(10)计算出其风速和风向。再次根据公式(12)计算出P(t+Δt)的地理坐标
(4)将P(t+Δt)作为t+Δt时刻的初始位置,重复步骤(1)至步骤(3),得到气团在研究的时间范围内每个时刻的位置,从而得到气团的后向轨迹。
可选的,在所述步骤S3中,基于FP-growth算法挖掘频繁污染源的具体步骤如下:
(1)将经过目标城市的每条气团轨迹视为一件事务。
(2)将轨迹点视为事务包含的一项。由于轨迹点由经纬度坐标表示,为了方便运算,根据距离就近原则将轨迹点用空气质量监测站点编号表示。
(3)根据FP-growth算法挖掘出满足支持度的频繁项集。
可选的,在所述步骤S4中,可视分析系统包括前后端两部分,前端由react和D3.js构成,后端包括MongoDB和nodejs。可视分析系统具体包括以下操作:
柱状图展示目标城市各空气质量监测站点受污染天数,饼图展示目标城市首要污染物占比。当鼠标移动至饼图某个区域内,柱状图展示饼图该区域对应的污染物IAQI均值在各个站点的分布情况。同理,鼠标移至某个柱状图方形区域内,饼图展示对应站点的首要污染物占比。折线图展示污染物浓度值随着时间的变化趋势。平行坐标展示最大频繁项集,地图直观展示到达目标城市的气团后向轨迹,帮助用户直观地发现污染物来源。
本发明的有益效果在于:本发明提供的一种基于后向轨迹模式的探索城市大气污染物来源的方法,在基于数据可视化的基础上。采用可视分析和后向轨迹模式相结合的思路,借助一定的可视化符号,对环境数据中的空间和时间信息进行直观的展示,加深用户对空气质量时空分布特征和污染物来源的掌握。本发明中的研究对象为特定时空范围内的环境监测数据,具有一定的真实性,对空气质量监测数据进行处理,加入空间维度,进而分析空气质量分布特征,帮助用户快速发现重污染地区以及各地区的首要污染物;利用气象数据和后向轨迹模型,构建污染物传输模型计算出72小时的气团后向轨迹,根据到达目标城市的轨迹进一步发现目标城市的污染物来源。借助气象学科的领域知识,加上可视分析的技术,能够有效灵活地帮助用户发现任意时间范围内的城市大气污染物来源。
本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作优选的详细描述,其中:
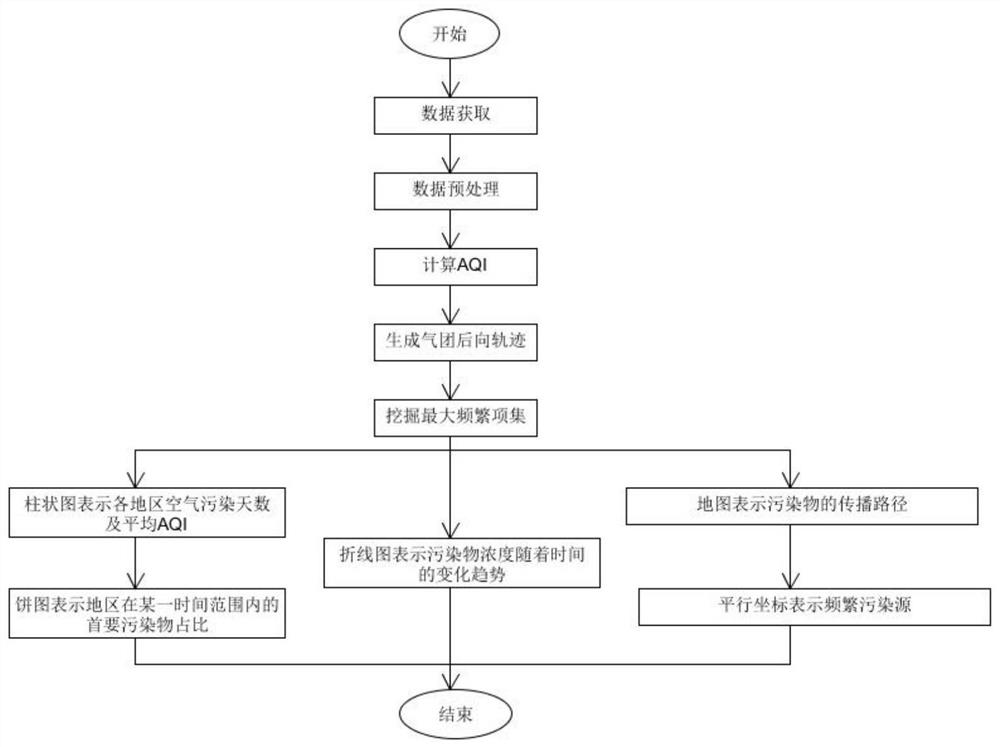
图1为本发明所述的基于后向轨迹模式可视分析城市大气污染来源的流程图;
图2为本发明构建可视分析系统的实现思路;
图3为本发明实例以仪表盘的方式展示目标城市空气污染分布状况;
图4为本发明实例以平行坐标展示最大频繁项集;
图5为本发明实例以高德地图直观展示污染物传输路径。
具体实施方式
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本发明的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本发明的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
如图1所示,本发明提供一种基于后向轨迹模式可视分析城市大气污染来源的方法,该方法包括以下步骤:
S1:研究数据的获取以及处理;
S2:采用后向轨迹模型,结合气象数据,生成气团后向轨迹,根据气团轨迹发现目标城市污染物来源;
S3:筛选出到达目标城市的气团后向轨迹,基于FP-growth算法挖掘频繁污染源
S4:基于空气质量数据和气团后向轨迹数据构建一个可视分析系统,从多个维度直观进行可视分析;
在本实施例中,确定所需要研究的空气质量实时监测数据来自网站(https://quotsoft.net/air/#archive),空气质量数据类型包括PM2.5、PM10、SO2、NO2、O3、CO、AQI等,该数据格式为(日期、小时数、数据类型、空气质量监测站点编号、数据类型值)。其中包含的空气质量监测站点共118个,地理范围为西经103.613,至东经109.7325,南纬26.2431,至北纬32.4535。气象数据来源于ERA5-Land再分析数据集,数据格式为(日期、风速U分量、风速V分量、经度、纬度),地理范围为西经103.6,至东经110,南纬26.2,至北纬32.5。
在本实施例中,针对某些站点在某一时间戳某一空气污染物浓度监测值缺失的情况,采用普通克里金插值法对其进行插值计算。在这一时间戳,对于所有空气质量监测站点,两两计算距离与半方差,拟合距离与半方差的关系,得到一个拟合曲线,通过这个距离与半方差的拟合曲线计算出这一时间戳时已知站点之间的半方差r
得到最优系数λ
在本实施例中,气团的运动时长为72小时,时间步长为1小时。每一天只计算零点时刻的气团后向轨迹,举例说明,例如计算12月5日到达某市的气团后向轨迹,则需要从12月2日零点开始逐小时计算至12月4日23点。
在本实施例中,假定空气质量监测站点10km之内的污染物气团由该站点释放。对每一个空气质量监测站点,根据半正矢公式计算出距其10km之内的气象数据点,该点处即为气团轨迹的起始位置。
在本实例中,根据气团的初始位置P(t),确定下一时刻气团位置P(t+Δt)分为两步,第一步为确定第一猜值点P′(t+Δt),第二步为根据第一猜值点和初始位置共同确定终点P(t+Δt)。具体过程如下:
第一步,计算第一猜值点的公式为:
P′(t+Δt)=P(t)+V(P,t)Δt#
首先根据气象数据查找初始位置P(t)的风速V(P,t),若该位置风速分量为未知,则在该未知点所处的网格中,利用反距离权重插值分别计算其UV分量。最后确定第一猜值点的经纬度坐标
第二步,计算P(t+Δt)的公式如下:
P(t+Δt)=P(t)+0.5[V(P,t)+V(P′,t+Δt)]Δt#(13)
在第一步得出第一猜值点的经纬度坐标,根据气象数据查找此坐标处的风速UV分量,若该处风速为未知量,同样利用反距离权重插值法计算其UV风量。与计算第一猜值点位置唯一不同的是,计算终点位置时,风速为第一猜值点的风速和初始位置的风速均值。
最后,将P(t+Δt)作为t+Δt时刻的初始位置,重复第一步和第二步,直到达到时间阈值或超出研究的地理范围,计算截止。得到了气团在各个时刻的位置,便组成了该气团后向轨迹。
在本实施例中,若气团后向轨迹中某个位置距离某市的距离在50km之内,则该气团轨迹将被列为某市空气污染物来源轨迹。
在本实例中,以最大频繁项集代表频繁污染源。将FP-growth算法生成的所有频繁项集用S集合表示,L代表最大频繁项集集合,并按照每个频繁项集的长度进行从大到小的排序,找出最大频繁项集的过程如下:
第一步,当前S集合中第一个元素则为最大频繁项集,将其从S集合中删除,存入L集合;
第二步,依次找出S集合中当前最大频繁项集的子集,并将其从S集合中删除;
第三步,重复第一步和第二步,直到S集合为空,L集合中的元素则为最大频繁项集。
在本实施例中,构建的可视化系统由前端和后端两部分组成,如图2所示。前端由react和D3.js组成,后端由MongoDB和express组成。前端页面由react将不同可视化部分组件起来,express用以接收前端发送的AJAX请求,将数据查询结果返回给前端。前端通过d3.js可视化库对后端返回的数据进行可视化展示,从多个维度对结果进行分析,具体包括如下:
如图3所示,用柱状图和饼图结合的可视化方式,展示某市空气质量时空分布特征,帮助用户快速发现污染严重区域。用户选定感兴趣的时间范围,点击查询按钮,柱状图显示该时间范围内某市17个空气质量监测站点的污染天数,饼图显示17个空气质量监测站点总体的首要污染物占比情况。为了让用户了解每个站点更为详细的信息,在柱状图和饼图之间添加了一些交互手段,比如:用户将鼠标移至任意站点的柱形上,饼图则显示该站点在查询的时间范围内,首要污染物占比情况,方便用户感知每个站点的首要污染物占比以及各站点之间的不同。第二个交互方式是用户将鼠标移至某一块饼图区域内,意即选中了某项污染物,柱状图则显示各个站点的该项污染物在查询时间范围内的均值IAQI。方便用户感知污染物的空间分布特征。
如图4所示,用平行坐标表示最大频繁项集。
如图5所示,将后向轨迹绘制在地图上,用户能够直观发现到达某市的气团轨迹在到达重庆之前经过的地方,帮助发现污染物来源。绿色圆点为轨迹起始点,红色圆点为轨迹结束点。
还可以利用折线图展示污染物浓度随着时间的变化趋势,帮助用户发现更细粒度的信息。
本发明以数据可视化和后向轨迹模型为理论基础,设计并实现了一个能够发现城市污染物来源的可视分析系统。系统包括三个部分,首先是展示城市空气质量时空分布特征部分,该部分利用空气质量实时监测数据,通过数据清洗和普通克里金插值处理,计算出每个站点各项污染物空气质量分指数,从而确定该站点的首要污染物及空气质量指数。用可视化元素展示空气质量在时空上的分布特征,帮助用户快速发现污染严重地区及各地区首要污染物。第二部分是污染物传输路径展示部分,该部分使用气象数据中的风场信息,基于HYSPLIT后向轨迹模式建立污染物粒子传输模型,生成气团后向轨迹。筛选出经过目标城市的气团后向轨迹,利用FP-growth算法挖掘最大频繁项集,帮助用户快速发现频繁污染源。利用地图可视化方式直观展示污染物传输路径。最后一部分根据折线图展示站点各项污染物浓度值随着时间的变化,帮助用户在时间的维度上进行污染物浓度值变化的细节探索。
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
- 一种基于后向轨迹模式的探索城市大气污染物来源的方法
- 一种基于CWT的大气一次污染物外来源定量分析方法