基于磁信标的单锚定位方法
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及一种基于磁信标的单锚定位方法,属于测量和导航领域。
背景技术
GPS定位技术是一种可以授时和测距的空间交会定点的导航系统,可向全球用户提供连续、实时、高精度的三维位置、速度与时间信息。用户需要手持接收器或者是在汽车上、轮船上、飞机上等安装接收器接受卫星信号,从卫星接收信号后从而来计算出位置。GPS定位如果想计算出位置,必须要在空旷范围且没有什么阻挡的地方,满足至少从3颗卫星中获取信号。但是其缺点在于GPS定位技术中需要终端内置卫星信号接收模块,定位精度受终端所处环境的影响较大;如果终端处于大型建筑物或者室内环境下,接收到的卫星信号太弱,定位精度将降低。
WiFi定位技术,主要应用于室内,公共场所等,通过无线保真技术对人或物体进行精细准确的定位。但是WiFi定位技术的缺点在于能耗较大,而且受服务范围限制,没有方向、速度等数据,不能导航。
ZigBee定位技术,主要用于距离短、功耗低且传输速率不高的各种电子设备之间,是一种近距离、低复杂度、低功耗、低速率、低成本的双向无线通讯技术。但Zigbee定位技术的缺点在于只能专网专用。数据率较低,不适用于传输速率高的应用。
蓝牙定位技术,基于RSSI原理,采用该原理和技术是可以满足室内短距离定位需求,精度比较高。但蓝牙定位技术的缺点在于复杂空间环境中,稳定性稍差,受噪声干扰大。
现有技术中,发明专利:一种基于双磁信标的定位定向方法(申请公布号为CN105928511 A),介绍了以两个相互垂直且线圈直径、匝数与通电电流已知的两组螺线管制作两个磁信标,然后将两个磁信标安装在已知位置作为信号源,定位目标安装磁强计,通过磁强计的实时测量数据;设定两个磁信标的输出频率,两个磁信标在整个坐标系中的初始位置;从待定位目标所安装的磁力计上以大于磁信标最大频率的二倍以上的采样频率提取数据;对采集到的数据进行傅立叶分解,分别得到两个磁信标对应频率的两组信号,根据磁感应强度确定目标,确定目标所在位置的方向向量,根据两方向向量,确定目标所在位置,其缺点在于根据两方向向量可确定两条直线,但是双信标安装条件苛刻,占地大,对传感器姿态和所在平面有要求,并且只能二维定位。发明专利:一种基于双磁信标的定位定向方法(申请公布号为CN 105928511 A)给出的解析定位法可以实现磁信标的定位,但是会存在象限的限制。
发明专利:一种旋转磁信标智能快速搜索数字定位方法(申请号201810584493.6)提出的定位算法虽然可以在一定程度上突破象限的限制,在同等条件下扩大磁信标定位的范围,但是前两者都会受限于磁场传感器的姿态。一旦传感器的姿态发生变化,我们就无法准确获得磁场强度,从而使得算法失效。
本发明提出的基于磁信标的单锚定位方法可以在不添加惯性器件的前提下,通过磁场的测量实现传感器姿态的测量,进而实现空间定位。
发明内容
本发明的目的是为了解决上述现有技术存在的问题,进而提供一种基于磁信标的单锚定位方法。
本发明的目的是通过以下技术方案实现的:
一种基于磁信标的单锚定位方法,所述基于磁信标的单锚定位方法具体步骤为:
步骤一:建立系统电压模型;
步骤二:对步骤一的系统电压模型通过镜像原理进行建模;
步骤三:近似处理电压模型的定位方法:系统电压模型采用两个相互水平并且正交的两组线圈组成接收线圈和发射线圈,计算第一个发射线圈在两个感应线圈感应出的电势平方和F
步骤四:精确电压模型的定位方法:系统电压模型采用两个相互水平并且正交的两组线圈组成接收线圈和发射线圈,计算每个发射线圈在两个感应线圈处分别产生的电压的平方和F
本发明一种基于磁信标的单锚定位方法,所述建立系统电压模型的具体过程为:
由通电线圈产生的磁场:
其中
该磁场将在接收线圈处产生电压:
其中a是接收线圈的面积,
本发明一种基于磁信标的单锚定位方法,所述系统电压模型通过镜像原理进行建模具体为:
发射线圈关于地面进行镜像处理形成虚拟线圈,则接收线圈处总的电压V
其中V
因此系统电压模型为:
从笛卡尔坐标系转换成柱坐标系,有如下关系式成立:
H=2h+α,α=δ(1-j)
(1-7)
其中,δ是复表深度,
由于
本发明一种基于磁信标的单锚定位方法,所述近似处理电压模型的定位方法的具体过程为:
由于发射线圈是由两个相互正交的线圈组成的,每个线圈均会在感应线处产生感应电势,故由下面的表达式成立:
第一个发射线圈在第一个接收线圈产生的电势为:
第一个发射线圈在第二个接收线圈产生的电势为:
定义F
其中c=-jωμ
定义F
由于发射线圈同样是相互正交的,故有φ
将F
其中b=5c
设F
则姿态信息φ
本发明一种基于磁信标的单锚定位方法,所述精确电压模型的定位方法具体为:
发射线圈在接收线圈处产生的感应电势为:
其中C
定义如下物理量:F
由于发射线圈是由两个相互正交的线圈组成的,每个线圈均会在感应线处产生感应电势,故由下面的表达式成立:
感应电动势可以改写成式(1-29)的形式:
定义变量A=3C
V
(1-30)
同理V
V
(1-31)
因此,F
其中B
同理可得F
其中B
φ
定位F
假设发射线圈和接收线圈都在同一二维平面,此时ρ=r,因此C
通过F
定义以接收线圈为中心的测量值的处理量F
解算出方位角信息如下:
通过F
本发明一种基于磁信标的单锚定位方法,相较于解析法和萤火虫算法最大的优势是对于传感器的姿态没有要求,本发明是分析传感器和磁场源之间相对姿态的方法;在解析法和萤火虫算法中,可以看出一旦是磁场测量出现偏差,那么我们就无法得到正确的定位结果,这与磁场强度的传感器有着直接的关系;在基于磁信标的单锚定位中所采用的算法是通过对线圈功率进行检测,从而转换成电压平方再进行定位,而在定位过程中,单锚定位采用了极坐标系的方法,将位置信息通过传感器与磁场源的相对距离和相对角度表示出测量位置的真实位置,这一方面规避了上述传感器姿态的问题,另一方面只要将磁场源的磁矩方向平行于x轴和y轴,我们就可以得到传感器相对于x轴和y轴的极坐标,进而直接得到了传感器的姿态信息。
附图说明
图1为本发明中磁矩矢量示意图。
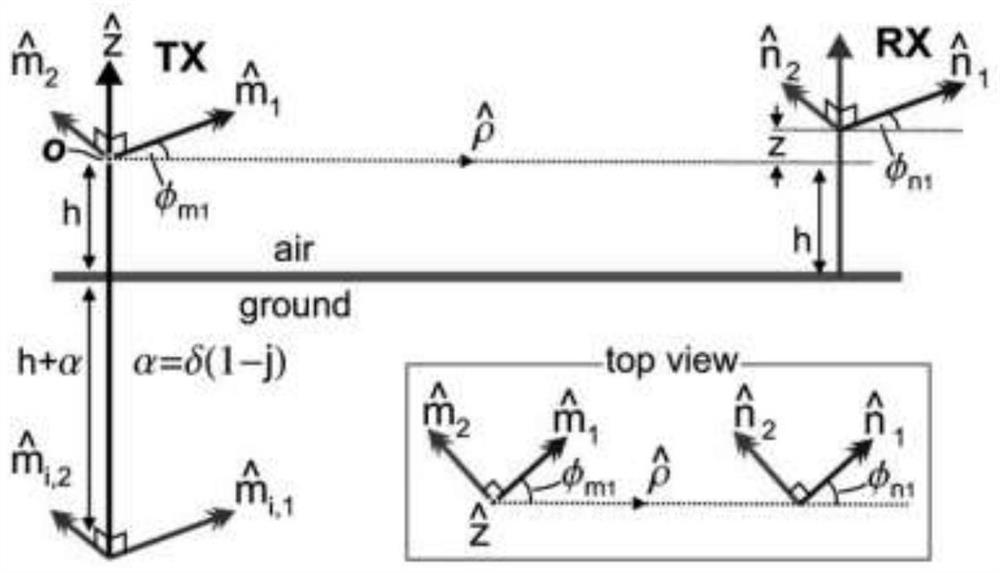
图2为本发明中发射线圈接收线圈及其空间磁矩矢量关系示意图。
其中,TX发射线圈端(生成磁场端),RX接收线圈端(测量端)。
具体实施方式
下面将结合附图对本发明做进一步的详细说明:本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式,但本发明的保护范围不限于下述实施例。
实施例一:如图1所示,本实施例所涉及的一种基于磁信标的单锚定位方法,系统电压模型的建立:
由通电线圈产生的磁场由如下公式给出:
其中
其中a是接收线圈的面积,
由图1可知,接收线圈处总的电压V
其中V
因此由下式成立:
当只考虑二维平面附近的径向测距,以及围绕发射线圈z轴的方向,此时发送和接收(垂直线圈)应只考虑水平磁矩,并使用圆柱坐标来描述问题。将上述的公式从笛卡尔坐标系转换成柱坐标系,有如下关系式成立:
H=2h+α,α=δ(1-j)
其中,δ是复表深度,
由于
由于考虑2-D定位,故操作面与x-y平面十分接近,我们假设z→0,因此ρ/r→1。
实施例二:如图1-2所示,本实施例所涉及的一种基于磁信标的单锚定位方法,基于近似处理电压模型的定位方法:
在近距离的条件下(ρ<<r),我们发现ρ/r≈ρ/r
另一方面在远距离的条件下(ρ>>H),我们发现ρ/r
由上述分析,V
其中r和r
上文中V
为了解决这个问题,我们用两个相互水平并且正交的两组线圈组成接收线圈和发射线圈,通过这四个线圈组建了一个测量系统,此时发射线圈和接收线圈的相对姿态是任意的,通过发射线圈产生的磁场来对接收线圈进行定位。细节如图2所示:
通过这个系统,共产生了4个场方程,我们首先关注接收线圈中的两个感应电压的表达式。由于发射线圈是由两个相互正交的线圈组成的,每个线圈均会在感应线处产生感应电势,故由下面的表达式成立:
接下来第一个发射线圈在第一个接收线圈产生的电势如下所示:
对于第一个发射线圈在第二个接收线圈产生的电势如下表达式如下所示:
现在我们定义一个物理量F
这里c=-jωμ
这里由于发射线圈同样是相互正交的,故有φ
而数学处理上,我们发现在极坐标系中,只要得到角度信息φ
这里我们将F
这里b=5c
而姿态信息φ
通过这个等式我们可以比较容易得到姿态信息:
实施例三:如图1-2所示,本实施例所涉及的一种基于磁信标的单锚定位方法,基于精确电压模型的定位原理:
根据上文得知,我们得知系统的电压模型的表达式,将发射线圈在接收线圈处产生的感应电势重新写成如下形式:
其中C
由C
我们同样需要通过V
F
这里我们同样使用了物理量F
在这个系统中我们考虑2-D定位,故我们定义了一些角度信息在图中显示,有如下的等式成立:
基于以上的定义,感应电动势可以改写成下式的形式:
为了简化显示,我们定义变量A和变量R,将上式改写成如下形式:
V
其中A=3C
V
我们发现通过和上一节类似的方法我们可以得到F
其中B
同理可得F
其中B
这里我们用到了φ
为了进行距离和位置的解算,参考实施例二对F
考虑近距离和远距离的情况下,在实施例二中,可以用C
这里使用了泰勒展开,通过F
我们同样需要方位角的相关信息,这里的处理方式同样和上一节中的方式类似,我们将以接收线圈为中心的测量值的处理量F
解算出方位角信息如下:
由上述的原理,我们就可以确定接收线圈的位置信息——距离和方位角。
以上所述,仅为本发明较佳的具体实施方式,这些具体实施方式都是基于本发明整体构思下的不同实现方式,而且本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书的保护范围为准。
- 基于磁信标的单锚定位方法
- 一种基于水下信标位置修正的单信标测距定位方法