一种基于大气湍流中激光阴影获取横向风速的方法
文献发布时间:2023-06-19 11:52:33
技术领域
本发明属于无线光通信技术领域,涉及一种基于大气湍流中激光阴影获取横向风速的方法。
背景技术
湍流导致的大气折射率变化对远距离激光传输造成了严重的干扰,其涉及的领域包括自由空间激光通信、光学跟踪系统、测距遥感等。大气湍流由不同尺度的涡旋构成,能量通常从大尺度涡旋向小尺度涡旋逐级传递。当激光经大气湍流传输一定距离后,会出现一系列传输效应,如光束漂移、光强闪烁和光斑扩展等。其中大尺度湍涡主要影响激光传输方向,导致光束漂移;小尺度湍涡主要影响光斑能量分布,导致光强起伏,称之为闪烁效应;最终远场接收到的激光光斑呈现出明暗相间的动态变化特征,其中蕴含了传输路径上的流场结构信息。
在远场大气激光成像实验中,由于横向风的存在,激光阴影会发生连续的定向移动。在激光与风场相互作用的理论研究方面,通过建立光学湍流模型,分析不同大气湍流强度下风速变化对自由空间光通信的性能影响。但是,开放光路中激光阴影的移动通常都是路径积分的结果,而激光传播路径上各处的流场状态不尽相同。目前,针对激光阴影移动与路径湍流中的横向风场之间定量关系的研究鲜有报道,人们也缺乏对于路径湍流矢量风场如何影响激光阴影的规律性认识。
发明内容
本发明的目的是提供一种基于大气湍流中激光阴影获取横向风速的方法,能够对光斑阴影进行精确的图像匹配,从而正确地获得横向风速。
本发明所采用的技术方案是,一种基于大气湍流中激光阴影获取横向风速的方法,具体按照以下步骤实施:
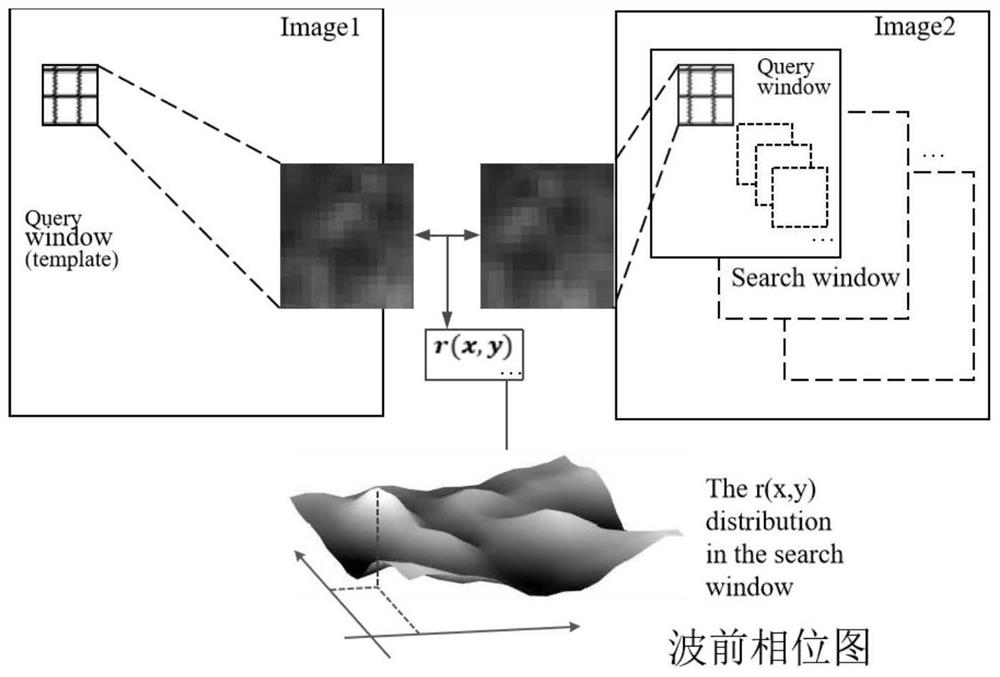
步骤1,获取光斑图像,通过在两个连续的光斑图像内进行全局搜索与互相关运算,计算不同位置的线性相关系数r(x,y),对两个连续的光斑图像进行匹配;
步骤2,根据步骤1中得到的两个连续光斑图像r(x,y)峰值在搜索窗口中所在位置,将两个连续光斑图像的r(x,y)峰值做差,得到此搜索窗口内光斑图像的相对位移,将相对位移通过像素尺度转换为实际位移,计算每个搜索窗口内光斑移动速度,判断匹配情况;
步骤3,将步骤1中匹配失败后经步骤2得到的光斑移动速度与步骤2中匹配失败的光斑移动速度进行纠正,得到横向风速。
本发明的特征还在于,
步骤1中,相关系数r(x,y)的有界离散积分的归一化形式可以表示为:
式(1)中,f(j,k)、g(j+m,k+n)分别为前、后两帧光斑图像中查询窗口的像素灰度分布函数,
当r(x,y)≥0.3时,则两个连续的光斑图像匹配成功;
当r(x,y)<0.3时,则两个连续的光斑图像匹配失败。
步骤2中,实际位移的计算过程为:
像素宽/分辨率=图片宽尺寸;
像素高/分辨率=图片高尺寸;
图片宽尺寸/2.54=x轴上的实际位移Δx;
图片高尺寸/2.54=y轴上的实际位移Δy。
步骤2中,每个搜索窗口内光斑移动速度的表达式为:
式(2)中,u、v分别为水平、垂直方向的光斑图像移动速度分量,Δt为光斑图像移动时间;
当得到的光斑图像移动速度与其周围的速度方向完全相反时,则速度匹配失败,否则,匹配成功。
步骤3中,对搜索窗口内光斑移动速度进行纠正的表达式为:
式(3)中,v'(x,y)、u'(x,y)分别为纠正后的水平、垂直方向的光斑移动速度分量。
本发明的有益效果是,一种基于大气湍流中激光阴影获取横向风速的方法,在大气湍流中,通过实验获得的光斑图像,运用整像素搜索算法,精确的将两个光斑图像进行匹配,再根据移动时间,获得横向风速,准确性高。
附图说明
图1是本发明一种基于大气湍流中激光阴影获取横向风速的方法的原理图。
具体实施方式
下面结合附图和具体实施方式对本发明进行详细说明。
本发明一种基于大气湍流中激光阴影获取横向风速的方法,如图1所示,湍流是由局部对流运动的各种尺度的涡流自然形成的,故根据两个连续的光斑图像间的涡旋运动关联可以在无需示踪粒子的情况下,将连续两帧散斑图像进行匹配、计算光斑移动速度、纠正匹配失败的速度,得到横向风速,具体按照以下步骤实施:
步骤1,获取光斑图像,通过在两个连续的光斑图像内进行全局搜索与互相关运算,计算不同位置的线性相关系数r(x,y),对两个连续的光斑图像进行匹配,其中,一般情况下,光斑的位移或形变都可视为连续变化,即发生突变的可能性很小,在高速相机的拍摄速度足够时,相邻两帧光斑图像中的匹配区域发生的形变忽略不计;
其有界离散积分的归一化形式可以表示为:
式(1)中,f(j,k)、g(j+m,k+n)分别为前、后两帧光斑图像中查询窗口的像素灰度分布函数,
当r(x,y)≥0.3时,则两个连续的光斑图像匹配成功;
当r(x,y)<0.3时,则两个连续的光斑图像匹配失败;
步骤2,根据步骤1中得到的两个连续光斑图像r(x,y)峰值在搜索窗口中所在位置,将两个连续光斑图像的r(x,y)峰值做差,得到此搜索窗口内光斑图像的相对位移,将相对位移通过像素尺度转换为实际位移,计算每个搜索窗口内光斑移动速度;
其中,实际位移为:
像素宽/分辨率=图片宽尺寸;
像素高/分辨率=图片高尺寸;
图片宽尺寸/2.54=x轴上的实际位移Δx;
图片高尺寸/2.54=y轴上的实际位移Δy;
则每个搜索窗口内光斑移动速度为:
式(2)中,u、v分别为水平、垂直方向的光斑图像移动速度分量,Δt为光斑图像移动时间;
当得到的光斑图像移动速度与其周围的速度方向完全相反时,则速度匹配失败,否则,匹配成功,匹配成功的速度即为横向风速;
步骤3,查询窗口尺寸的选择、前后两帧图像中光斑的形变以及图像背景噪声等因素会导致匹配失败的情况,
当r(x,y)<0.3时,为弱相关,对步骤2得到的搜索窗口内光斑移动速度进行纠正,得到横向风速;
当步骤2中得到的光斑图像移动速度与其周围的速度方向完全相反时,对搜索窗口内光斑移动速度进行纠正,得到横向风速;
即:
式(3)中,v'(x,y)、u'(x,y)分别为纠正后的水平、垂直方向的光斑移动速度分量。
- 一种基于大气湍流中激光阴影获取横向风速的方法
- 一种获取激光阴影、纹影及剪切干涉图像的仿真计算方法