一种电力机器人固态面阵激光雷达测距装置
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及电力巡检技术领域,具体是一种电力机器人固态面阵激光雷达测距装置。
背景技术
近年来,随着我国“智能电网”的不断发展,电力巡检机器人的应用也越来越广泛,电力巡检机器人能够取代传统的人工巡检,适应许多人类无法完成的工作,例如可以在恶劣的户外环境中使用,靠近上万伏的高电压。变电站是电网的重要组成部分,为了保证电网系统安全稳定运行,需对站内电器设备进行定时检验。传统采用人力进行巡检的方法,不仅费时费力,而且许多变电站都修建在偏远的郊区,室外环境的高电压、高辐射,会对巡检人员的安全造成巨大的威胁。因此,电力巡检机器人应运而生,现有电力巡检机器人采用自动控制,在遇到障碍物时能够通过激光雷达自行判断转向,灵活性强。如公布号为CN109483508 A的专利文献公开了一种电力巡检机器人,包括底盘,底盘上配合装设有四个驱动轮系,底盘的前、后两端分别装设有防碰撞开关,且防碰撞开关上装设有若干个防跌落传感器,底盘的上部配合装设有一安装平台,安装平台的前、后侧分别装设有前安装台和后安装台,该前安装台上固定装设有超声波雷达、激光雷达以及音箱,该后安装台上固定装设有一云台模块。该发明实现自动变电站巡视,各项标记抄录和智能分析,雨雪冰冻、雷雨天气等特巡,将承担事故处理的前期查勘等工作,能有效降低人工巡检劳动强度,降低变电站运维成本,提高巡检作业和管理的自动化和智能化水平,为智能变电站和无人值守变电站提供创新型的技术检测手段和全方位的安全保障。但是,该发明通过设置超声波雷达、激光雷达以及防碰撞开关,实现该机器人的自主探测行驶功能,即其激光雷达只能实现测量装置点到目标点的距离,无法测量装置点以外任意两点之间的距离,从而对于两个目标物之间距离较窄(正好能通过电力机器人)的通道,容易出现“无法进入”的误判,因此巡检不够全面。
又如公布号CN 107764405 A专利文献公开的一种基于激光测距及视角补偿的电力巡检机器人红外测温装置,包括相连接的机器人和上位机,所述机器人包括:行走底座;定位机构;红外成像机构,用于获取待测点的红外图像;激光雷达扫描仪,用于检测机器人与待测点所处平面的直线距离;仰角传感器,设置于所述定位机构上,用于检测红外成像机构与待测点连线相对水平面的倾角及观测视角;坡度传感器,设置于所述行走底座上,用于检测机器人的爬坡度;所述上位机根据所述红外图像、机器人与待测点所处平面的直线距离红外成像机构与待测点连线相对水平面的倾角及观测视角和机器人的爬坡度,补偿计算获得待测点最终温度。该发明中的激光雷达扫描仪同样无法测量电力巡检机器人所在点以外任意两点之间的距离,无法解决上述技术问题。
发明内容
有鉴于此,本发明针对现有技术的不足,提供的一种能够测量电力机器人所在点以外任意两点目标物之间的距离,能够提高电力机器人巡检范围的电力机器人固态面阵激光雷达测距装置。
为解决上述技术问题,本发明所采取的技术方案是:一种电力机器人固态面阵激光雷达测距装置,包括机器人本体,以及设置在所述机器人本体上的固态面阵激光雷达,所述固态面阵激光雷达通过无线传输模块与云服务器信息互联,所述固态面阵激光雷达采集测量区域内除测量点外任意两点的测量信息,并且传输至所述云服务器,所述云服务器根据两点的测量信息计算出两点的坐标以及两点之间的距离。
进一步的,所述测量信息包括固态面阵激光雷达感光元输出的距离值,固态面阵激光雷达感光元的垂直角度,以及固态面阵激光雷达感光元的水平角度。
进一步的,所述云服务器根据两点的测量信息构建3D点云图像,通过如下公式转化为直角坐标系,X、Y、Z分别表示直角坐标系的坐标;
X = Dist × sin (90 − V) × cos(H − 30)
Y = Dist × sin (90 − V) × sin (H − 30)
Z = Dist × sin (90 − V)
其中:Dist:固态面阵激光雷达感光元输出的距离值;
V:固态面阵激光雷达感光元的垂直角度,范围是-1.9°~+1.9°,垂直方向角分辨率为0.2°;
H:固态面阵激光雷达感光元的水平角度,范围是0°~+60°。
进一步的,任意两点A、B的坐标分别为:A(X
进一步的,所述固态面阵激光雷达上设置高精度温度传感器,所述高精度温度传感器通过无线传输模块与所述云服务器信息互联,所述云服务器根据所述高精度温度传感器采集的温度信息对固态面阵激光雷达进行温度补偿。
进一步的,所述机器人本体包括底盘、双边轴轮毂电机轮、转向模块、控制器和无线信号收发器,所述底盘下部设置四个所述双边轴轮毂电机轮,每一所述双边轴轮毂电机轮上均设置支架,所述支架上固定设置轴体,所述轴体与设置在所述底盘底部的轴承连接。
进一步的,所述转向模块包括双轴伸电动机和伞状齿轮,所述双轴伸电动机的两个输出轴上均设置第一伞状齿轮,所述轴体上端设置第二伞状齿轮,所述第一伞状齿轮与所述第二伞状齿轮相互啮合。
进一步的,所述双轴伸电动机和所述双边轴轮毂电机轮均与所述控制器通过信号线连接,所述控制器通过所述无线信号收发器与所述云服务器信号互联。
电力巡检机器人通常采用激光雷达测距来避开障碍物,即现有激光雷达测距装置,均测量装置点到目标点的距离,然后转向移动,避免与障碍物发生碰撞,由于电力设备通常为了降低相互干扰,其间距较大,电力巡检机器人能轻松进入两个电力设备之间的通道内,基于此,仅通过监测最近障碍物的距离即可完成巡检。例如公布号为CN 106711823 A专利文献公开的一种电力巡检机器人,包括壳体、底盘系统和云台,所述的底盘系统包括底盘架、前轮组件、后轮组件、悬挂机构和驱动机构,后轮组件通过悬挂机构安装在底盘架上,所述的悬挂机构包括固定设置在底盘架上的固定支撑架,固定支撑架铰接连接有摆臂构件,后轮组件包括一对后轮,后轮安装在摆臂构件上,摆臂构件与固定支撑架之间还连接有减震构件,后轮还连接所述的驱动机构;底盘架上还设置有控制电器件,控制电器件与驱动机构电连接;底盘架的前端部连接有激光雷达,云台中安装有高清日夜型相机和红外热像仪。又如公告号为CN 206193235 U专利文献公开的一种电力巡检机器人用二维激光雷达标定装置,包括具有行走机构的移动平台,所述移动平台上设置有待标定的激光雷达,所述激光雷达的上端设置有电控旋转装置,所述电控旋转装置上端设置有激光测距仪,使激光测距仪的测距参考点位于电控旋转装置转动中心,数据采集控制装置接收激光雷达和激光测距仪的测量结果,并控制电控旋转装置的转动角度。由此可知,该两项专利文献公开的电力机器人均采用激光雷达测量障碍物的距离并转向,因此,本申请测量装置点以外两点障碍物之间的距离,以进入距离较窄通道进行全面巡检的技术方案对本领域技术人员来说是不容易想到的。
与现有技术相比,本发明的有益效果如下:
本发明电力机器人固态面阵激光雷达测距装置,机器人本体上设置固态面阵激光雷达,在行走的过程中基于固态面阵激光雷达实时采集前方障碍物的信息,通过激光雷达测量前方障碍物的距离和角度重建3D点云图像,从而能够计算出机器人本体所在测量点以外任意两点(目标物)之间的距离,从而机器人本体能够通过比对自身尺寸与两目标物之间距离的大小,进而避免机器人本体在移动至两个目标物之间距离较窄(正好能通过电力机器人)的通道时,出现“无法进入”的误判问题,使得电力机器人巡检范围更加全面。
本发明电力机器人固态面阵激光雷达测距装置,基于固态面阵激光雷达的电力巡检机器人测距,与单线机械旋转雷达相比,没有任何的机械旋转部件,因此可以长期稳定、可靠的运行,并且可以得到更广的垂直探测范围;固态面阵激光雷达在不同环境温度下,测距准度随温度的漂移,根据不同温漂的样本,利用高精度温度传感器,进行温度补偿,减少温漂对测量精度的影响;激光法测距其垂直方向角分辨率为0.2°,使其可以获得更加精细的分辨能力。
另外,机器人本体的底盘下设置四个双边轴轮毂电机轮,每一双边轴轮毂电机轮上部支架上的轴体安装于底盘底板上轴承内,并且轴体上端位于底盘内部,水平方向上的两个轴体通过一个双轴伸电动机驱动,当固态面阵激光雷达检测到两障碍物之间的通道能够使机器人本体进入时,控制器控制所述双轴伸电动机转动一定角度,使四个双边轴轮毂电机轮转向90度,平移一定距离使机器人本体与两障碍物之间的通道对齐,然后再控制四个双边轴轮毂电机轮转向90度,前进进入通道进行巡检。
附图说明
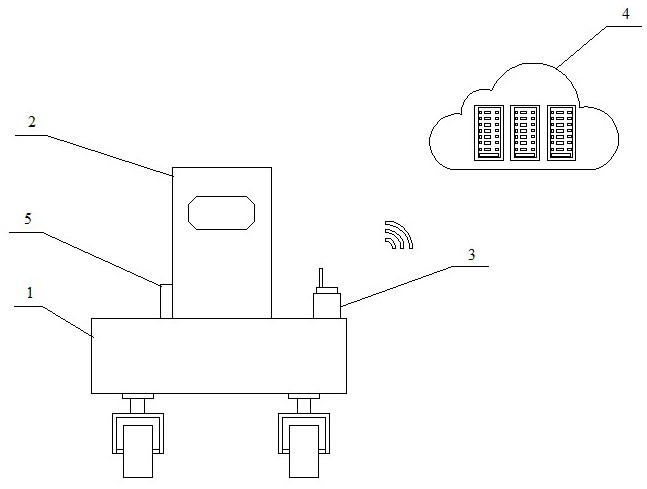
图1是本发明实施例一的结构示意图;
图2是本发明实施例二中机器人本体的正视剖视图;
图3是本发明实施例二中机器人本体的左视剖视图;
图4是本发明实施例三中电力机器人固态面阵激光雷达测距装置的应用原理示意图。
具体实施方式
为了更好地理解本发明,下面结合实施例进一步清楚阐述本发明的内容,但本发明的保护内容不仅仅局限于下面的实施例。在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员来说显而易见的是,本发明可以无需一个或多个这些细节而得以实施。
实施例一
如图1所示,一种电力机器人固态面阵激光雷达测距装置,包括机器人本体1,以及设置在所述机器人本体1上的固态面阵激光雷达2,所述固态面阵激光雷达2通过无线传输模块3与云服务器4信息互联,所述固态面阵激光雷达2采集测量区域内除测量点外任意两点的测量信息,并且传输至所述云服务器4,所述云服务器4根据两点的测量信息计算出两点的坐标以及两点之间的距离。
所述测量信息包括固态面阵激光雷达感光元输出的距离值,固态面阵激光雷达感光元的垂直角度,以及固态面阵激光雷达感光元的水平角度。
所述云服务器4根据两点的测量信息构建3D点云图像,通过如下公式转化为直角坐标系,X、Y、Z分别表示直角坐标系的坐标;
X = Dist × sin (90 − V) × cos(H − 30)
Y = Dist × sin (90 − V) × sin (H − 30)
Z = Dist × sin (90 − V)
其中:Dist:固态面阵激光雷达感光元输出的距离值;
V:固态面阵激光雷达感光元的垂直角度,范围是-1.9°~+1.9°,垂直方向角分辨率为0.2°;
H:固态面阵激光雷达感光元的水平角度,范围是0°~+60°。
以固态面阵激光雷达所在测量点为原点,任意两点A、B的坐标分别为:A(X
所述固态面阵激光雷达2上设置高精度温度传感器5,所述高精度温度传感器5通过无线传输模块3与所述云服务器4信息互联,所述云服务器4根据所述高精度温度传感器5采集的温度信息对固态面阵激光雷达2进行温度补偿。
本发明实施例中,固态面阵激光雷达与云服务器通过4G无线传输模块信息互联,当固态面阵激光雷达在探测时,能够采集除测量点外任意两点目标物的位置信息,并通过云服务器进行计算,从而得出目标物的坐标,以及两目标物之间的距离,为自动化巡检提供数据支持,提高巡检范围。
实施例二
本发明实施例的电力机器人固态面阵激光雷达测距装置,作为对实施例一的进一步改进:
如图2~3所示,所述机器人本体包括底盘11、双边轴轮毂电机轮12、转向模块、控制器和无线信号收发器,所述底盘11下部设置四个所述双边轴轮毂电机轮12,每一所述双边轴轮毂电机轮12上均设置支架13,所述支架13上固定设置轴体14,所述轴体14与设置在所述底盘11底部的轴承15连接。
所述转向模块包括双轴伸电动机16和伞状齿轮,所述双轴伸电动机16的两个输出轴上均设置第一伞状齿轮17,所述轴体14上端设置第二伞状齿轮18,所述第一伞状齿轮与所述第二伞状齿轮相互啮合。
所述双轴伸电动机16和所述双边轴轮毂电机轮12均与所述控制器通过信号线连接,所述控制器通过所述无线信号收发器与所述云服务器信号互联。
本发明实施例中,机器人本体在移动时,前方遇到两个障碍物时,需要判断是否能从两个障碍物之间穿过,此时,通过云服务器测量出两个障碍物之间的距离,并与机器人本体的宽度相比较,若能通过,还需要判断机器人本体是否正对两个障碍物之间,若非,则根据机器人本体相对于两障碍物的位置进行调整,通过转向模块将四个双边轴轮毂电机轮转向90度,然后平移至两个障碍物正中间,再将四个双边轴轮毂电机轮转向90度,恢复至原来的前进状态,从而进入两个障碍物之间,进行巡检。
实施例三
一种电力机器人固态面阵激光雷达测距装置,包括机器人本体,以及设置在所述机器人本体上的固态面阵激光雷达,所述固态面阵激光雷达通过无线传输模块与云服务器信息互联,所述固态面阵激光雷达采集测量区域内除测量点外任意两点的测量信息,并且传输至所述云服务器,所述云服务器根据两点的测量信息计算出两点的坐标以及两点之间的距离。
所述测量信息包括固态面阵激光雷达感光元输出的距离值,固态面阵激光雷达感光元的垂直角度,以及固态面阵激光雷达感光元的水平角度。
所述云服务器根据两点的测量信息构建3D点云图像,通过如下公式转化为直角坐标系,X、Y、Z分别表示直角坐标系的坐标;
X = Dist × sin (90 − V) × cos(H − 30)
Y = Dist × sin (90 − V) × sin (H − 30)
Z = Dist × sin (90 − V)
其中:Dist:固态面阵激光雷达感光元输出的距离值;
V:固态面阵激光雷达感光元的垂直角度,范围是-1.9°~+1.9°,垂直方向角分辨率为0.2°;
H:固态面阵激光雷达感光元的水平角度,范围是0°~+60°。
以固态面阵激光雷达所在测量点为原点,任意两点A、B的坐标分别为:A(X
所述固态面阵激光雷达上设置高精度温度传感器,所述高精度温度传感器通过无线传输模块与所述云服务器信息互联,所述云服务器根据所述高精度温度传感器采集的温度信息对固态面阵激光雷达进行温度补偿。
所述机器人本体包括底盘、双边轴轮毂电机轮、转向模块、控制器和无线信号收发器,所述底盘下部设置四个所述双边轴轮毂电机轮,每一所述双边轴轮毂电机轮上均设置支架,所述支架上固定设置轴体,所述轴体与设置在所述底盘底部的轴承连接。
所述转向模块包括双轴伸电动机和伞状齿轮,所述双轴伸电动机的两个输出轴上均设置第一伞状齿轮,所述轴体上端设置第二伞状齿轮,所述第一伞状齿轮与所述第二伞状齿轮相互啮合。
所述双轴伸电动机和所述双边轴轮毂电机轮均与所述控制器通过信号线连接,所述控制器通过所述无线信号收发器与所述云服务器信号互联。
本发明实施例与实施例一、二的不同之处在于:
电力机器人固态面阵激光雷达测距装置的应用方法:
(1)机器人本体行走过程中,固态面阵激光雷达实时采集前方障碍物的信息,测量前方障碍物的距离、水平角度和垂直角度,并上传至云服务器,构建3D点云图像,通过上述公式计算得到前方障碍物A、B的坐标,以及障碍物A、B之间的距离D;
(2)控制器判断机器人本体的宽度L与A、B之间距离D的大小,若L>D,则控制双轴伸电动机转动使四个双边轴轮毂电机轮转向90度,然后启动四个双边轴轮毂电机轮转动前进,进行巡检;若L 如图4所示,以固态面阵激光雷达所在点C为原点,障碍物A(X 本发明实施例中,通过上述方法,首先测得两障碍物之间的距离,机器人本体能够在遇到两个目标物之间距离较窄(正好能通过电力机器人)的通道,不会出现“无法进入”的误判情况,因此提高了巡检的覆盖面,维护变电站内设备的安全稳定运行。 最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,本领域普通技术人员对本发明的技术方案所做的其他修改或者等同替换,只要不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。
- 一种电力机器人固态面阵激光雷达测距装置
- 一种无人驾驶变视场固态面阵激光雷达测距系统及方法