车辆控制参数的标定方法、装置及车辆
文献发布时间:2023-06-19 12:05:39
技术领域
本申请涉及车辆技术领域,特别涉及一种车辆控制参数的标定方法、装置及车辆。
背景技术
自动驾驶控制车辆需要将控制器输出的加、减速度映射成实际车辆上的油门、刹车开度,才可以保证物理量的匹配。
相关技术中,在不同速度下,分别给定不同的油门开度、刹车开度,记录对应的加、减速度,再通过简化的分段直线拟合、最小二乘法拟合等,来分别计算加速度-油门开度/减速度-刹车开度间的数学关系。
然而,分段拟合仅能保证分段拟合点附近的拟合精度,最小二乘拟合精度则与拟合方程变量次数相关,当次数过低时,会导致拟合误差较大;而次数过高时,会导致过拟合。并且分段拟合或最小二乘拟合方法没有考虑速度不稳误差、传感器误差、多次测试环境情况偏差等对结果造成的影响,导致较大误差,亟待解决。
申请内容
本申请提供一种车辆控制参数的标定方法、装置及车辆,以解决相关技术中没有考虑速度不稳误差、传感器误差、多次测试环境情况偏差等对结果造成的影响,导致误差较大的问题,大大提高车辆控制参数标定的准确性。
本申请第一方面实施例提供一种车辆控制参数的标定方法,包括以下步骤:
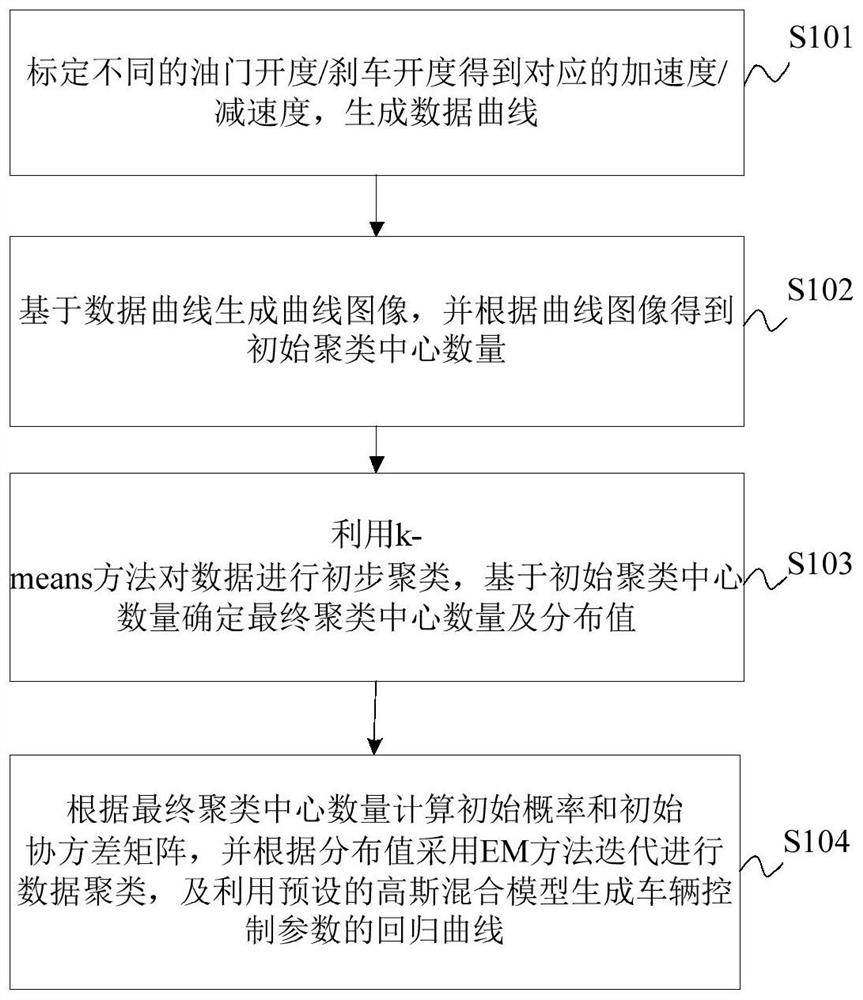
标定不同的油门开度/刹车开度得到对应的加速度/减速度,生成数据曲线;
基于所述数据曲线生成曲线图像,并根据所述曲线图像得到初始聚类中心数量;
利用k-means方法对数据进行初步聚类,基于所述初始聚类中心数量确定最优聚类中心数量及分布值;以及
根据所述最优聚类中心数量计算初始概率和初始协方差矩阵,并根据所述分布值采用EM方法迭代进行数据聚类,及利用预设的高斯混合模型生成车辆控制参数的回归曲线。
可选地,所述基于所述初始聚类中心数量确定最优聚类中心数量及分布值,包括:
获取每个观测值所属的类索引,并确定聚类质心的位置,及计算每个类内点到质心距离的总和。
可选地,所述基于所述初始聚类中心数量确定最优聚类中心数量及分布值,还包括:
根据所述每个类内点到质心距离的总和计算失真函数,以更改聚类中心数量,得到所述最优聚类中心数量及分布值。
可选地,所述根据所述分布值采用EM方法迭代进行数据聚类,包括:
根据所述最优聚类中心数量、所述聚类质心的位置、所述初始概率、所述初始协方差矩阵,计算每个数据来自子模型的概率,其中,第一计算公式为:
其中,ξ
可选地,所述根据所述分布值采用EM方法迭代进行数据聚类,还包括:
计算新一轮迭代的模型参数,其中,第二计算公式为:
本申请第二方面实施例提供一种车辆控制参数的标定装置,包括:
第一生成模块,用于标定不同的油门开度/刹车开度得到对应的加速度/减速度,生成数据曲线;
获取模块,用于基于所述数据曲线生成曲线图像,并根据所述曲线图像得到初始聚类中心数量;
确定模块,用于利用k-means方法对数据进行初步聚类,基于所述初始聚类中心数量确定最优聚类中心数量及分布值;以及
第二生成模块,用于根据所述最优聚类中心数量计算初始概率、和协方差矩阵,并根据所述分布值采用EM方法迭代进行数据聚类,及利用预设的高斯混合模型生成车辆控制参数的回归曲线。
可选地,所述确定模块,包括:
第一获取单元,用于获取每个观测值所属的类索引,并确定聚类质心的位置,及计算每个类内点到质心距离的总和。
可选地,所述确定模块,还包括:
第二获取单元,用于根据所述每个类内点到质心距离的总和计算失真函数,以更改聚类中心数量,得到所述最优聚类中心数量及分布值。
可选地,所述第二生成模块,包括:
第一计算单元,用于根据所述最优聚类中心数量、所述聚类质心的位置、所述初始概率、所述初始协方差矩阵,计算每个数据来自子模型的概率,其中,第一计算公式为:
其中,ξ
可选地,所述第二生成模块,还包括:
第二计算单元,用于计算新一轮迭代的模型参数,其中,第二计算公式为:
本申请第三方面实施例提供一种车辆,其包括上述的车辆控制参数的标定装置。
由此,可以标定不同的油门开度/刹车开度得到对应的加速度/减速度,生成数据曲线,并基于数据曲线生成曲线图像,并根据曲线图像得到初始聚类中心数量,并利用k-means方法对数据进行初步聚类,基于初始聚类中心数量确定最优聚类中心数量及分布值,并根据最优聚类中心数量计算初始概率和协方差矩阵,并根据分布值采用EM方法迭代进行数据聚类,及利用预设的高斯混合模型生成车辆控制参数的回归曲线,解决了相关技术中没有考虑速度不稳误差、传感器误差、多次测试环境情况偏差等对结果造成的影响,导致误差较大的问题,大大提高车辆控制参数标定的准确性。
本申请附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
附图说明
本申请上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
图1为根据本申请实施例提供的一种车辆控制参数的标定方法的流程图;
图2为根据本申请一个实施例的车辆控制参数的标定方法的流程图;
图3为根据本申请实施例的车辆控制参数的标定装置的示例图。
具体实施方式
下面详细描述本申请的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本申请,而不能理解为对本申请的限制。
下面参考附图描述本申请实施例的车辆控制参数的标定方法、装置及车辆。针对上述背景技术中心提到的没有考虑速度不稳误差、传感器误差、多次测试环境情况偏差等对结果造成的影响,导致误差较大的问题,本申请提供了一种车辆控制参数的标定方法,在该方法中,可以标定不同的油门开度/刹车开度得到对应的加速度/减速度,生成数据曲线,并基于数据曲线生成曲线图像,并根据曲线图像得到初始聚类中心数量,并利用k-means方法对数据进行初步聚类,基于初始聚类中心数量确定最优聚类中心数量及分布值,并根据最优聚类中心数量计算初始概率和协方差矩阵,并根据分布值采用EM(Expectation-Maximum,最大期望)方法迭代进行数据聚类,及利用预设的高斯混合模型生成车辆控制参数的回归曲线,解决了相关技术中没有考虑速度不稳误差、传感器误差、多次测试环境情况偏差等对结果造成的影响,导致误差较大的问题,大大提高车辆控制参数标定的准确性。
具体而言,图1为本申请实施例所提供的一种车辆控制参数的标定方法的流程示意图。
如图1所示,该车辆控制参数的标定方法包括以下步骤:
在步骤S101中,标定不同的油门开度/刹车开度得到对应的加速度/减速度,生成数据曲线。
具体而言,本申请实施例可以通过多次试验在10km/h、20km/h、30km/h、40km/h、50km/h、60km/h速度下,给定不同的、对应的油门、刹车开度获得的不同的加、减速度。
以下均以刹车主缸压力-减速度对应关系为例,以减速度为自变量x,单位为m/s^2。主缸压力为应变量y,单位为Mpa。
在不同速度下记录数据,故至少应生成6组曲线。假设每组曲线采样数目为N,存储数组为
在步骤S102中,基于数据曲线生成曲线图像,并根据曲线图像得到初始聚类中心数量。
也就是说,本申请实施例可以将曲线图像可视化,并通过图像初步判断聚类中心数量,此处设定初始聚类中心数k=3,可理解为缓刹、中刹、急刹状态。
在步骤S103中,利用k-means方法对数据进行初步聚类,基于初始聚类中心数量确定最优聚类中心数量及分布值。
可选地,基于初始聚类中心数量确定最优聚类中心数量及分布值,包括:获取每个观测值所属的类索引,并确定聚类质心的位置,及计算每个类内点到质心距离的总和。
具体而言,本申请实施例可以通过k-means方法,获取每个观测值所属的类索引idx,为(6N)*1维的向量,每个变量内容为聚类所属类别,此处分别为1、2或3。获取聚类质心的位置C,为k*2维的矩阵。获取每个类内点到质心距离的总和sumd,为k*1维的向量。
可选地,基于初始聚类中心数量确定最优聚类中心数量及分布值,还包括:根据每个类内点到质心距离的总和计算失真函数,以更改聚类中心数量,得到最优聚类中心数量及分布值。
应当理解的是,本申请实施例通过对上述获取到的sumd求和,获取k=3条件下的失真函数J_(k=3),更改k的数值,并重复执行步骤S103,从而再次计算得到每个观测值所属的类索引、聚类质心的位置和失真函数,并获取失真函数最小时的k值作为最优聚类中心数量。
在步骤S104中,根据最优聚类中心数量计算初始概率和协方差矩阵,并根据分布值采用EM方法迭代进行数据聚类,及利用预设的高斯混合模型(Gaussian Mixture Model,GMM)生成车辆控制参数的回归曲线。
具体而言,本申请实施例可以根据失真函数最小时的k值下的每个聚类的初始概率Priors,为k*1维的向量,以及初始协方差矩阵Sigma,为k*2*2的矩阵。
可选地,根据分布值采用EM方法迭代进行数据聚类,包括:根据最优聚类中心数量、聚类质心的位置、初始概率、初始协方差矩阵,计算每个数据来自子模型的概率,其中,第一计算公式为:
其中,ξ
具体地,本申请实施例可以将聚类质心的位置C、初始概率Priors、初始协方差矩阵Sigma作为初始值输入EM算法,可迭代求解出最终的C、Priors、Sigma,主要包括以下步骤:
(1)输入初始化参数最优聚类中心数量k、聚类质心的位置C、初始概率Priors、初始协方差矩阵Sigma;
(2)E-Step:依据当前参数,计算每个数据j来自子模型k的概率,其中,第一计算公式为:
其中,ξ
(3)M-step:计算新一轮迭代的模型参数,其中,第二计算公式为:
重复计算E-step和M-step,直至||(log(P(ξ
由此,将输入数组
进一步地,为使得本领域技术人员进一步了解本申请实施例的车辆控制参数的标定方法,下面结合具体实施例进行详细阐述。
如图2所示,该车辆控制参数的标定方法,包括以下步骤:
S201,标定不同的油门开度/刹车开度得到对应的加速度/减速度,并记录相应数据。
S202,绘制散点曲线图,并通过图像初步判断聚类中心数量k_i。
S203,判断是否更改k_i,如果是,执行步骤S204。
S204,通过k-means方法根据k_i个中心对散点初步聚类,获取每个观测值的簇索引的n×1向量idx,以及k个簇质心的位置C,簇内的点到质心距离的总和sumd。
S205,对sumd求和,获取该聚类中心数量k_i条件下的失真函数J_i。
S206,判断J_i是否为最小值,如果是,取最小值对应k_i作为最优聚类中心数量,否则,执行步骤S203。
S207,计算每个聚类的初始概率Priors,以及初始协方差矩阵Sigma。
S208,以上获得的初始概率、最优聚类中心数量,初始协方差矩阵作为初始值输入EM算法,迭代求解最终的聚类概率、聚类中心数量以及协方差矩阵。
S209,将数据重均匀采样。
S210,根据重采样数据、聚类概率、聚类中心数量以及协方差矩阵获得每点的期望均值,从而获得最终结果。
由此,通过对不同速度条件下加/减速度-油门/刹车开度建模,不再将建模区间机械的分成低速区、高速区,从而实现全速度区间建模,且避免了参数切换导致的问题;GMM建模可以可视化速度条件对加/减速度-油门/刹车开度的影响,并且可以通过协方差矩阵引入影响因子,从而实现更精确的建模;GMR回归生成的加/减速度-油门/刹车开度关系曲线较为平滑,从而避免了参数切换导致的跳变问题。
根据本申请实施例提出的车辆控制参数的标定方法,可以标定不同的油门开度/刹车开度得到对应的加速度/减速度,生成数据曲线,并基于数据曲线生成曲线图像,并根据曲线图像得到初始聚类中心数量,并利用k-means方法对数据进行初步聚类,基于初始聚类中心数量确定最优聚类中心数量及分布值,并根据最优聚类中心数量计算初始概率和协方差矩阵,并根据分布值采用EM方法迭代进行数据聚类,及利用预设的高斯混合模型生成车辆控制参数的回归曲线,解决了相关技术中没有考虑速度不稳误差、传感器误差、多次测试环境情况偏差等对结果造成的影响,导致误差较大的问题,大大提高车辆控制参数标定的准确性。
其次参照附图描述根据本申请实施例提出的车辆控制参数的标定装置。
图3是本申请实施例的车辆控制参数的标定装置的方框示意图。
如图3所示,该车辆控制参数的标定装置10包括:第一生成模块100、获取模块200、确定模块300和第二生成模块400。
其中,第一生成模块100用于标定不同的油门开度/刹车开度得到对应的加速度/减速度,生成数据曲线;
获取模块200用于基于数据曲线生成曲线图像,并根据曲线图像得到初始聚类中心数量;
确定模块300用于利用k-means方法对数据进行初步聚类,基于初始聚类中心数量确定最优聚类中心数量及分布值;以及
第二生成模块400用于根据最优聚类中心数量计算初始概率和协方差矩阵,并根据分布值采用EM方法迭代进行数据聚类,及利用预设的高斯混合模型生成车辆控制参数的回归曲线。
可选地,确定模块300包括:
第一获取单元,用于获取每个观测值所属的类索引,并确定聚类质心的位置,及计算每个类内点到质心距离的总和。
可选地,确定模块300还包括:
第二获取单元,用于根据每个类内点到质心距离的总和计算失真函数,以更改聚类中心数量,得到最优聚类中心数量及分布值。
可选地,第二生成模块400包括:
第一计算单元,用于根据最优聚类中心数量、聚类质心的位置、初始概率、初始协方差矩阵,计算每个数据来自子模型的概率,其中,第一计算公式为:
其中,ξ
可选地,第二生成模块400还包括:
第二计算单元,用于计算新一轮迭代的模型参数,其中,第二计算公式为:
需要说明的是,前述对车辆控制参数的标定方法实施例的解释说明也适用于该实施例的车辆控制参数的标定装置,此处不再赘述。
根据本申请实施例提出的车辆控制参数的标定装置,可以标定不同的油门开度/刹车开度得到对应的加速度/减速度,生成数据曲线,并基于数据曲线生成曲线图像,并根据曲线图像得到初始聚类中心数量,并利用k-means方法对数据进行初步聚类,基于初始聚类中心数量确定最优聚类中心数量及分布值,并根据最优聚类中心数量计算初始概率和协方差矩阵,并根据分布值采用EM方法迭代进行数据聚类,及利用预设的高斯混合模型生成车辆控制参数的回归曲线,解决了相关技术中没有考虑速度不稳误差、传感器误差、多次测试环境情况偏差等对结果造成的影响,导致误差较大的问题,大大提高车辆控制参数标定的准确性。
此外,本申请实施例还提出了一种车辆,该车辆包括上述的车辆控制参数的标定装置。
根据本申请实施例提出的车辆,通过上述的车辆控制参数的标定装置,解决了相关技术中没有考虑速度不稳误差、传感器误差、多次测试环境情况偏差等对结果造成的影响,导致误差较大的问题,大大提高车辆控制参数标定的准确性。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本申请的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或N个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本申请的描述中,“N个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
流程图中或在此以其他方式描述的任何过程或方法描述可以被理解为,表示包括一个或更N个用于实现定制逻辑功能或过程的步骤的可执行指令的代码的模块、片段或部分,并且本申请的优选实施方式的范围包括另外的实现,其中可以不按所示出或讨论的顺序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本申请的实施例所属技术领域的技术人员所理解。
应当理解,本申请的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,N个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现。如,如果用硬件来实现和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(PGA),现场可编程门阵列(FPGA)等。
本技术领域的普通技术人员可以理解实现上述实施例方法携带的全部或部分步骤是可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,该程序在执行时,包括方法实施例的步骤之一或其组合。
- 车辆控制参数的标定方法、装置及车辆
- 车辆防碰撞参数标定方法和装置、车辆控制器、存储介质