一种基于冠状病毒UVC消杀机理的智能机器人
文献发布时间:2023-06-19 12:11:54
技术领域
本发明涉及智能控制领域,尤其涉及一种基于冠状病毒UVC消杀机理的智能机器人。
背景技术
UVC(Ultraviolet C radiation)是指波长范围在200~275nm内波段的紫外线,又称为短波灭菌紫外线。它的穿透能力是最弱的,无法穿透大部分的透明玻璃及塑料。日光中含有的短波紫外线几乎被臭氧层完全吸收。短波紫外线对人体的伤害很大,短时间照射即可灼伤皮肤,长期或高强度照射还会造成皮肤癌。
研究表明,UVC紫外辐射可以作用于微生物(细菌、病毒、芽孢等病原体),破坏微生物机体细胞中的DNA(脱氧核糖核酸)或RNA(核糖核酸)的分子结构,引起DNA链断裂、核酸和蛋白的交联破裂,造成生长性细胞死亡和再生性细胞死亡,从而达到消毒杀菌的目的。UVC紫外辐射属于广谱杀菌类,能杀死一切微生物,包括细菌、病毒、芽孢和真菌。紫外辐射对病毒的杀灭作用已得到验证,不同的消杀对象需要的紫外辐射剂量并不相同。常见的UVC消毒设备有两种:(1)UVC空气消毒设备:其将空气引入到UVC模块(窄风道)中,以杀灭细菌/病毒,然后通过风机将净化后的空气带出该设备;(2)UVC光照消毒设备:其将UVC置于周围空间中,空气中或物体表面上的细菌/病毒会因暴露于UVC而死亡。
UVC会对人的皮肤和眼睛有害,因而常见的UVC设备通过以下三种方法来避免这类危害:(i)遥控器:其允许用户在远处来控制UVC设备,以避免接触;(ii)运动传感器:其用于探测一定距离内的人或动物,并在探测到人或动物时能够自动关停;(iii)所述设备通过外壳将UVC灯罩在其内,通过UVC灯的部分暴露对空气或物体表面的细菌/病毒进行消杀。UVC沿直线传播,这给依赖于位置的设备造成了盲点劣势。低压汞UVC灯是利用较低气压(<10-2Pa)汞蒸汽被激化而发出紫外光,其发光谱线主要是253.7nm波长,是肉眼看不见的紫外线。
目前,Coronavirus(COVID-19)是最具传染性和致命性的病毒之一,多地从冷链食品或冷链环境中检出新冠病毒阳性,尤其是进口冷冻食品,因此开发出一种经济而又精巧的产品来定量化地、有效地对冷链食品及其包装进行病毒消杀极为重要。目前需要在冷链环境中设置消毒装置进行病毒的消杀工作,但是现有技术中大都采用人工消杀病毒,该工作方式效率低、消毒不够全面以及存在紫外消杀剂量不够明确可能会导致消杀不到位或资源浪费的问题。
发明内容
根据现有技术存在的问题,本发明公开了一种基于冠状病毒UVC消杀机理的智能机器人,该机器人结构简单、安装方便,在常温与低温环境中杀菌效果优良,对冷链物流仓库的环境进行无人化不间断的病毒消杀工作,以解决现有技术中人工消杀病毒效率低下、不够全面以及紫外消杀剂量不够明确的问题,该技术方案包括:
通过检测机器人前方的环境信息以及机器人的实时位置信息对该机器人的运行轨迹进行规划、工作过程进行调控的智能控制单元,所述智能控制单元采用智能化消毒路径规划算法、在已知环境地图中设计出符合病毒消杀规定的机器人行走路径和消毒模式;
接收智能控制模块传送的运行规划指令和消毒模式、对环境中的病毒进行消毒处理的UVC消毒单元,
以及对多个机器人进行远程调控的智能化软件调度单元,所述智能化软件调度单元采用网络数据协议与智能控制单元数据通信。
使用紫外灯具对处于20℃和-20℃环境中的病毒进行照射消杀,使用TCID50方法测定对照组和处理后实验组的病毒滴度并与检测限进行比较,计算杀灭率。对照组和实验组各设置3个重复。
进一步的,所述智能控制单元包括传感器模块、导航模块和消毒控制模块;
所述传感器模块包括超声波雷达和激光雷达传感器,所述超声波雷达用于感应机器人行驶路线前方的障碍物距离信息,当机器人运行到预设消毒地点时,所述超声波雷达获取机器人前方正面物体毫米精度的距离信息;所述激光雷达传感器对机器人的运行过程进行实时定位,根据测量360°视角范围内的激光雷达角度和距离信息形成高速扫描点云数据信息帧、并通过点云与深度信息数据进行转换,将处理后的深度信息与预先扫描的环境栅格地图中特征概率点进行匹配计算、获得机器人在地图中位置坐标最佳估计值,将该最佳估计值作为机器人的定位坐标;
所述导航模块接收传感器模块传送的障碍物距离信息和定位坐标、同时将激光雷达角度和环境距离信息作为定位数据,将超声波雷达距离信息作为前进方向障碍物检测数据、从而进行障碍物躲避路径计算。
所述UVC消毒单元包括消毒控制模块和紫外消毒灯具,所述消毒控制模块读取前置超声波雷达测量的机器人与消毒目标之间的距离信息,通过紫外线灯照射剂量计算公式获取紫外灯照射剂量与照射距离关系曲线,实时获得机器人在该距离所需消毒时间,从而输出消毒时间的控制指令。
所述紫外消毒灯具接收消毒控制模块传送的指令信息对环境进行消毒工作。
所述移动单元还包括通信模块、移动底盘和机器人状态指示灯;
所述移动控制单元通过通信模块接收智能化软件调度单元传送的机器人消毒导航控制指令、并与智能化软件调度单元建立点对点的SSH通信关系;
所述移动底盘包括左右两轮差速驱动轮、前后支撑万向轮、左右差速轮驱动电机和电机控制器,所述移动底盘与导航模块和电机控制器之间进行串口通信,电机控制器接收到导航模块传送的运动指令产生电机控制信号驱动左右两轮差速驱动轮,根据差速运动模型产生控制底盘前进、转弯或者后退的控制电信号,同时发送安装在移动底盘左右驱动轮上的编码器数据,读取驱动轮转过实时角度,并计算出底盘行驶累计里程数据信息,通过通信接口发送至导航模块;
所述机器人状态指示灯与导航模块串口通信,接收导航模块发布的机器人状态数据、从而显示机器人正常行进、消毒工作、存在故障以及任务完成的状态。
所述UVC消毒单元包括UVC紫外灯和支架,所述UVC紫外灯采用管式结构并竖向排列。
所述UVC紫外灯波长为200-275nm。
其中常温环境与低温环境温度范围为-20-30℃。
所述TCID50是测定病毒感染力的一种方法,在离心管中对病毒液进行连续梯度稀释,稀释后的病毒接种到多孔培养板中,在孔中加入细胞悬液使细胞达到一定数量。所述对照组是取一定量病毒稀释液均匀涂在培养皿中,所述实验组是取一定量病毒稀释液均匀涂在培养皿中,在特定环境中培养一段时间后用紫外灯具对培养皿中的病毒进行消杀。所述检测限是仪器对目标物识别的最小浓度,小于检出限认为是没有检出。
由于采用了上述技术方案,本发明提供的一种基于冠状病毒UVC消杀机理的智能机器人,该装置采用智能化软件控制机器人的消杀范围和UVC剂量,因此具有冠状病毒消杀效率高,机器人毋需使用人力对其进行持续性控制,因此可以实现不间断紫外病毒消杀,达到了具有更高的安全性效果。由于采用了云技术可以实现智能化的远程调控,使用者在消毒区域外即可对所述基于冠状病毒UVC消杀机理的智能机器人进行控制操作,同时控制状态指示灯也可一定程度上反应装置状态,防止意外情况发生;对表面携带病毒的货物影响更小,由于UVC消杀病毒的原理是破坏微生物机体细胞中的DNA(脱氧核糖核酸)或RNA(核糖核酸)的分子结构,引起DNA链断裂、核酸和蛋白的交联破裂,造成生长性细胞死亡和再生性细胞死亡,从而达到消毒杀菌的目的,因此并不会对包装内货物物性产生任何影响。该机器人根据距离控制UVC照射时间,有效避免控制不好时间使得消毒时间过短、消毒效果不佳、或消毒时间过长造成资源浪费的现象。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明智能机器人的结构示意图;
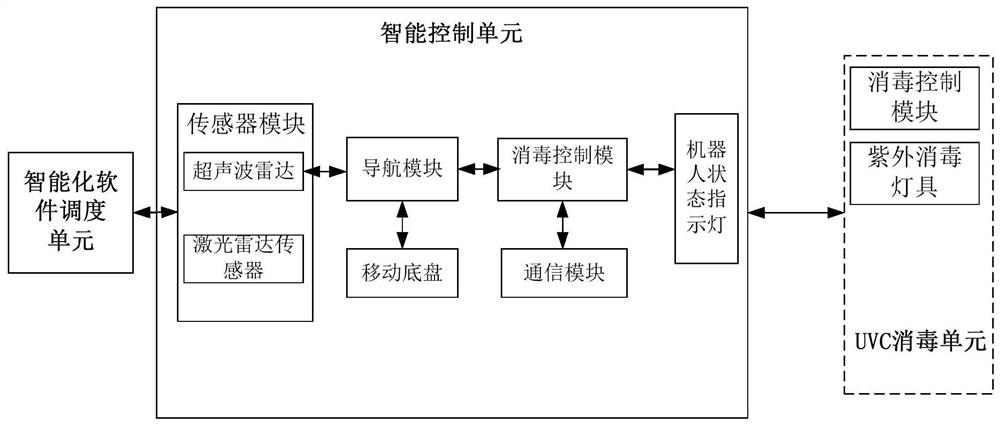
图2为本发明中机器人的智能控制单元的电路原理图;
图3为本发明中在20℃和-20℃环境下对冠状病毒消杀结果示意图。
具体实施方式
为使本发明的技术方案和优点更加清楚,下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚完整的描述:
如图1所示的一种基于冠状病毒UVC消杀机理的智能机器人,包括智能控制单元、UVC消毒单元和智能化软件调度单元。所述智能控制单元检测机器人前方的环境信息以及机器人的实时位置信息对该机器人的运行轨迹进行规划、消毒工作过程进行调控。所述UVC消毒单元接收智能控制模块传送的运行规划指令和消毒模式、对环境中的病毒进行消毒处理。所述智能化软件调度单元对多个机器人进行远程调控、采用网络数据协议与智能控制单元数据通信。
进一步的,如图2所示,所述智能控制单元包括传感器模块、消毒控制模块、导航模块、通信模块、移动底盘和机器人状态指示灯。
所述传感器模块包括超声波雷达和激光雷达传感器,所述超声波雷达用于感应机器人行驶路线前方的障碍物距离信息,当机器人运行到预设消毒地点时,所述超声波雷达获取机器人前方正面物体毫米精度的距离信息;所述激光雷达传感器对机器人的运行过程进行实时定位,根据测量360°视角范围内的激光雷达角度和距离信息形成高速扫描点云数据信息帧、并通过点云与深度信息数据进行转换,将处理后的深度信息与预先扫描的环境栅格地图中特征点进行匹配计算、获得机器人在地图中位置坐标最佳估计值,将该最佳估计值作为机器人的定位坐标。
工作状态下,在机器人的移动底盘安装有四个超声波雷达,前方三个后方一个,其中超声波雷达包括超声波生成器、处理单元和输出级,超声波生成器生成超声波脉冲,处理单元对接收到的超声波反射脉冲进行分析,测量超声波的行程时间并换算为行程距离。前置超声波雷达对准前进方向发射超声波,如前方有障碍物或待消毒物体就可测量物体表面与传感器的距离。后置超声波雷达用于机器人底盘后退时监测后方是否存在障碍物。
所述激光雷达传感器是一个厘米精度激光雷达,激光雷达中的激光器通过旋转向周围360度发射出脉冲激光,反射的脉冲激光被激光雷达接收器接收,根据脉冲行程时间换算得到反射物体的距离。激光雷达将每个角度值和角度对应的测距结果反馈到智能控制单元。机器人通过激光雷达对工作环境进行建图,并通过SLAM定位算法使机器人获得当前位置的坐标,将激光雷达高速扫描得到的点云与深度信息数据进行转换,与预先建立地图中的特征点进行匹配计算即可获得机器人在地图中的准确位置,实现对机器人的准确定位。
所述导航模块接收传感器模块传送的障碍物距离信息和定位坐标、同时将激光雷达角度和障碍物距离信息作为定位数据,将超声波雷达距离信息作为前进方向障碍物检测数据、从而进行障碍物躲避路径计算。
工作状态下:导航模块与激光雷达传感器和超声波雷达连接,主要功能是结合激光雷达传感器和超声波雷达获得的机器人相对于障碍物距离信息,利用这些信息作为机器人避障的数据,通过对机器人既定路线的实时监测,如遇到障碍物则进行路径重规划计算。并且根据自身工作状态向状态指示灯发布信息,控制状态指示灯的工作状态。
所述消毒工作单元包括消毒控制模块和紫外消毒灯具,消毒控制模块读取机器人与消毒目标之间的距离信息,通过紫外线灯照射剂量公式获取紫外灯照射剂量与照射距离关系曲线,实时获得机器人在该距离所需消毒时间,从而输出消毒时间的控制指令。工作过程中消毒控制模块首先获取导航模块的机器人的实时状态,根据机器人的状态判断紫外消毒灯具是否开启。消毒控制模块还会通过前置的超声波雷达读取机器人前方与消毒目标的距离信息,通过紫外线灯照射剂量公式获取紫外灯照射剂量与照射距离关系曲线,获得消毒目标所需消毒时间,并通过消毒状态指令控制紫外消毒灯具状态。
进一步的,所述移动控制单元通过通信模块接收智能化软件调度单元传送的机器人消毒导航控制指令、并与智能化软件调度单元建立点对点的SSH通信关系,即通信模块建立位于机器人移动底盘上的WIFI局域网络与机器人控制服务器的通信功能,服务器端通过与机器人嵌入式系统建立点对点的SSH通信,发布机器人消毒导航控制指令,并回读机器人工作状态与电量信息。
所述移动底盘包括左右两轮差速驱动轮、前后支撑万向轮、左右差速轮驱动电机和电机控制器,所述移动底盘与导航模块和电机控制器之间进行串口通信,电机控制器接收到导航模块传送的运动指令产生电机控制信号驱动左右两轮差速驱动轮,根据差速运动模型产生控制底盘前进、转弯或者后退的控制电信号,同时发送移动底盘左右驱动轮转过实时角度,并计算出底盘行驶累计里程数据信息,通过通信接口发送至导航模块。
所述机器人状态指示灯通过与导航模块串口通信,接收导航模块发布的机器人状态数据,根据机器人正常行进、消毒工作、故障、任务完成等状态,分别显示绿色、红色、黄色、绿色闪烁5秒钟后关闭等状态。
进一步的,所述UVC消毒单元包括UVC紫外灯和支架,所述UVC紫外灯采用管式结构并竖向排列。
进一步的,所述UVC紫外灯波长为200-275nm。
其中常温环境与低温环境温度范围为-20-30℃。
进一步的,如图3所示,所述在20℃环境下对冠状病毒进行消杀,先测定冠状病毒原液的TCID50,使用PBS溶液将病毒滴度稀释至10
所述在-20℃环境下对冠状病毒进行消杀,先测定冠状病毒原液的TCID50,用PBS溶液将病毒滴度稀释至10
实际应用中,采用本发明公开的基于冠状病毒UVC消杀机理的智能机器人进行智能消毒工作时,可以实现智能化软件系统控制机器人消杀范围及UVC剂量;冠状病毒消杀效率高,机器人毋需使用人力对其进行持续性控制,因此可以实现不间断紫外病毒消杀;具有更高的安全性,由于可以实现智能化软件系统控制,使用者在消毒区域外即可对所述基于冠状病毒UVC消杀机理的智能机器人进行控制操作,同时所述控制状态指示灯也可一定程度上反应装置状态,防止意外情况发生;对表面携带病毒的货物影响更小,由于UVC消杀病毒的原理是破坏微生物机体细胞中的DNA(脱氧核糖核酸)或RNA(核糖核酸)的分子结构,引起DNA链断裂、核酸和蛋白的交联破裂,造成生长性细胞死亡和再生性细胞死亡,从而达到消毒杀菌的目的,因此并不会对包装内货物物性产生任何影响。基于冠状病毒UVC消杀机理的智能机器人具有根据距离控制UVC照射时间的功能,有效避免控制不好时间使得消毒时间过短,消毒效果不佳,或消毒时间过长造成资源浪费。
本发明基于冠状病毒UVC消杀机理的智能机器人不仅适用于冷链物流仓库的冠状病毒消杀,也可应用于其他需要进行消杀的货物仓库等,适用范围广泛。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种基于冠状病毒UVC消杀机理的智能机器人
- 一种冠状病毒特别是新型冠状病毒消杀的方法和药剂应用