一种基于云控制的智能处理系统
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及智能处理的技术领域,特别涉及一种基于云控制的智能处理系统。
背景技术
汽车现在已经是人类生活中常见的代步工具了,而且汽车的制造水平和普及程度在衡量一个国家现代化和科技水平中占据了重要的比重。科学技术在不断发展,人们对无人驾驶技术的呼声越来越高。相对于传统的人工驾驶,自动驾驶技术在便捷,效率上有着较好的优势。目前我国已有自动驾驶汽车正在投入试用,自动驾驶的发展趋势方兴未艾,自动驾驶技术成为当前的主流研究方向。
基于5G时代,对无人驾驶概念新的解构,本系统通小程序采用云端控制,以及通过汽车上传云端的信号通过小程序进行显示进行人机远程交互,确保在无人驾驶汽车的使用过程中既保障了车主对于车辆的控制权,也保障了车主对自己汽车使用情况的知情权。小车对于本地位置的上传,通过微信小程序进行显示,并设置登陆界面用以识别用户。现有的无人驾驶系统比较繁杂,不适用于规范化场合。
发明内容
针对现有技术中存在的不足之处,本发明的目的是提供一种基于云控制的智能处理系统,免去了一些不必要的环节,并且节省了相关成本,为某些小功率、节省成本、规范化管理的应用场合提供了解决方案。为了实现根据本发明的上述目的和其他优点,提供了一种基于云控制的智能处理系统,包括:
摄像头模块、与所述摄像头模块信号连接的上位机处理器、与所述上位机处理器信号连接的下位机处理器、与所述下位机处理器信号连接的电器驱动板、与所述电器驱动板信号连接的电机及语音模块;
所述上位机处理器信号连接有云端,所述云端信号连接有终端模块;
所述下位机处理器信号连接有传感器与超声波测距模块。
优选的,所述摄像头模块用于对小车前方的路况进行识别检测,并通过显示屏显示识别结果,摄像头模块将结构通过蓝牙串口通信于下位机处理器。
优选的,所述终端模块通过云端来控制EAIDK是否运行相关程序。
优选的,所述上位机处理器中的上位机处理芯片为EAIDK芯片,所述下位机处理器中的下位机为STM32芯片。
优选的,所述语音模块用于实现用户和设备间的交互。
优选的,所述终端模块用于通过OneNET云端来控制结束使用,在结束时,系统通过连接网络的IP地址来获取位置信息并上传至云端云端位置通过终端模块显示停车位置并通过外接API进行导航。
优选的,所述摄像头模块用于特征点检测以及提取比较来实现对路标的识别,摄像头模块通过ORB算法找出最匹配的关键点后,通过比率确定其是否为匹配的点,如果为最匹配的点则记录,当记录点的数量大于设定的阀值则判断为相应路标图。
本发明与现有技术相比,其有益效果是:
(1)可应用性,可以实现上述各项功能并在控制小车上有较好效果,可以应用于多场景。
(2)用户控制便捷与实用性,本发明可以通过手机终端控制数据处理模块的程序运行来控制小车的使用权。在结束使用时也会上传小车位置,方便下次获取车辆信息。
(3)多功能性,本发明融合了多个功能以及控制方式,可以实现路标识别、路标识别、语音交互、手机终端控制等功能。
(4)本发明使用的路标识别算法相对于常用的yolov算法在处理器上有更快的响应,并且整套操作流程十分流畅。可以实现使用人员对设备的有效和舒心的控制。
附图说明
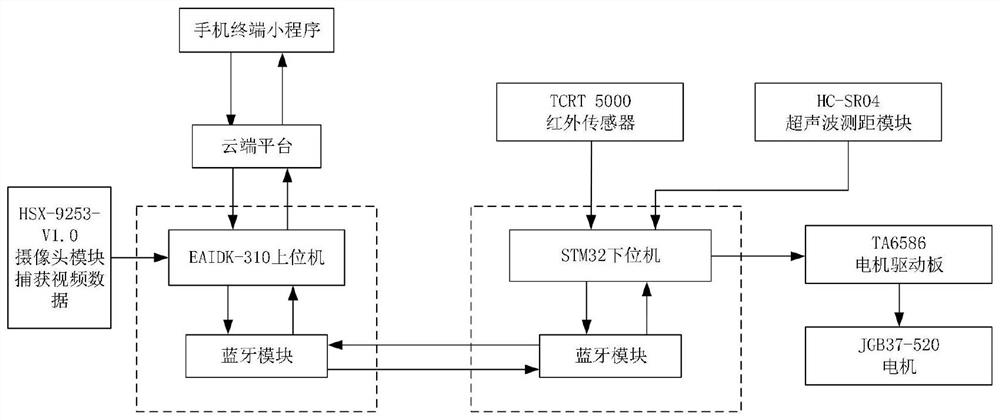
图1为根据本发明的基于云控制的智能处理系统的整体结构示意图;
图2为根据本发明的基于云控制的智能处理系统的整体工作流程示意图;
图3为根据本发明的基于云控制的智能处理系统的路标识别流程示意图;
图4为根据本发明的基于云控制的智能处理系统的行人识别流程示意图;
图5为根据本发明的基于云控制的智能处理系统的特征点提取示意图;
图6为根据本发明的基于云控制的智能处理系统的路标识别效果图;
图7为根据本发明的基于云控制的智能处理系统的云端图;
图8为根据本发明的基于云控制的智能处理系统的云端位置信息图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参照图1-8,一种基于云控制的智能处理系统,包括:摄像头模块、与所述摄像头模块信号连接的上位机处理器、与所述上位机处理器信号连接的下位机处理器、与所述下位机处理器信号连接的电器驱动板、与所述电器驱动板信号连接的电机及语音模块;所述上位机处理器信号连接有云端,所述云端信号连接有终端模块;所述下位机处理器信号连接有传感器与超声波测距模块,处理器从云端获得允许数据后,摄像头对小车前方的路况进行识别检测,并通过显示屏显示识别结果,并将结果通过蓝牙串口通信给下位机信号,从而控制小车做出相应动作。通过语音模块,来实现用户和设备间的交互,来满足更多场合的要求。在结束使用时获取网络IP的定位信息并上传至云端,方便下次获取车辆信息。
进一步的,所述摄像头模块用于对小车前方的路况进行识别检测,并通过显示屏显示识别结果,摄像头模块将结构通过蓝牙串口通信于下位机处理器。
进一步的,所述终端模块通过云端来控制EAIDK是否运行相关程序,所述终端模块为小程序端,小程序端通过云端来控制EAIDK是否运行相关程序,小程序终端可以给云平台发送启动和停止信号,云端接收到信号后给小程序端反馈显示操作类型及是否成功。如果收到允许信号,上位机EAIDK-310 会不断从云端拿到信号,在允许后,EAIDK运行程序,并给下位机STM32 发送指令,小车可以使用。
进一步的,所述上位机处理器中的上位机处理芯片为EAIDK芯片,所述下位机处理器中的下位机为STM32芯片。
进一步的,所述语音模块用于实现用户和设备间的交互,通过语言模块实现人机语音交互,来控制小车的运行方式。在使用语音控制时必须通过唤醒词来唤醒,唤醒词可以自定义,唤醒后会得到互动答复,之后说出指令即可对车辆进行控制。
进一步的,所述终端模块用于通过OneNET云端来控制结束使用,在结束时,系统通过连接网络的IP地址来获取位置信息并上传至云端,小程序端通过OneNET云端来控制结束使用,在结束时,系统通过连接网络的IP地址来获取位置信息并上传至云端,云端位置通过终端模块显示停车位置并通过外接API进行导航。
在本实施例中,能够识别到摄像头捕捉的行人,并结合测距模块来做出一定距离内减速,危险距离内停车的操作。
在本实施例中,通过特征点检测以及提取比较来实现对路标的识别。如图3所示,本设计采用ORB算法,其特点是计算速度快,计算时间其他主流算法SIFT、SURF的1-10%。关键点检测用了FAST算法,找出最匹配的关键点后,通过比率确定其是否为匹配的点,如果为最匹配的点则记录,当记录点的数量大于设定的阀值则判断为相应路标图。
这里说明的设备数量和处理规模是用来简化本发明的说明的,对本发明的应用、修改和变化对本领域的技术人员来说是显而易见的。
尽管本发明的实施方案已公开如上,但其并不仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
- 一种基于云控制的智能处理系统
- 基于大数据分析的智能家居远程控制用户授权方法及智能家居云控制平台