扶梯压轨高度调整异常的诊断方法、装置和信号处理装置
文献发布时间:2023-06-19 13:27:45
技术领域
本申请涉及扶梯检测控制技术领域,特别是涉及一种扶梯压轨高度调整异常的诊断方法、装置、信号处理装置、扶梯压轨高度调整异常检测系统、自动扶梯和存储介质。
背景技术
随着城市化建设的加快,自动扶梯的需求越来越多,但面对日益激烈的市场竞争,追求高质量低成本的思想理念已经成为主流,压轨作为自动扶梯最重要部件之一,其高度调整的合理性是扶梯整体性能的重要因素。传统技术中,通过在自动扶梯压轨装配安装后的止通规检测对压轨高度调整情况进行检测。然而,传统的检测方式无法避免人为调整管理失控或焊接应力变形导致的压轨高度调整不足,则容易造成梯级滚轮及压轨过度磨损,缩短梯级滚轮及压轨的寿命周期,甚至引发自动扶梯停用和安全事故。
发明内容
基于此,有必要针对上述技术问题,提供一种扶梯压轨高度调整异常的诊断方法、装置、信号处理装置、扶梯压轨高度调整异常检测系统、自动扶梯和存储介质,能够避免人为调整管理失控或焊接应力变形导致的压轨高度调整不足,则可以防止梯级滚轮及压轨过度磨损,增长梯级滚轮及压轨的寿命周期,避免引发自动扶梯停用和安全事故。
第一方面,提供了一种扶梯压轨高度调整异常的诊断方法,所述方法包括:
获取信号采集装置生成的脉冲信号;信号采集装置设置于扶梯的梯级滚轮轴的一侧,用于感应梯级滚轮轴对应连接的梯级滚轮的旋转角度并生成脉冲信号;
对脉冲信号进行处理,得到信号峰值间隔时间;信号峰值间隔时间是指脉冲信号中出现峰值的时间间隔;
若信号峰值间隔时间大于第一时间阈值且小于第一目标时间区间的最小值,则判定扶梯的压轨高度调整异常;第一时间阈值根据梯级滚轮发生逆转所需的最长时间确定;第一目标时间区间根据目标时间和第一预设时间调整因子确定;目标时间是指梯级滚轮的旋转周期和梯级滚轮与对应的链轮进行咬合所需的时间之和。
在其中一个实施例中,上述方法还包括:若信号峰值间隔时间属于第二目标时间区间,则判定扶梯的压轨高度调整正常且梯级滚轮处于正常运转状态;第二目标区间根据梯级滚轮的旋转周期和第二预设时间调整因子确定。
在其中一个实施例中,上述方法还包括:若信号峰值间隔时间小于第一时间阈值且不属于第二目标时间区间,则判定扶梯的压轨高度调整正常且梯级滚轮处于逆转状态。
在其中一个实施例中,若信号峰值间隔时间属于第一目标时间区间,则判定扶梯的压轨高度调整正常且梯级滚轮处于与对应的链轮进行咬合的状态。
在其中一个实施例中,对脉冲信号进行处理,得到信号峰值间隔时间的步骤包括:对脉冲信号进行模数转换,得到目标数字信号;对目标数字信号进行信号分时提取运算,得到信号峰值间隔时间。
第二方面,提供了一种扶梯压轨高度调整异常的诊断装置,该装置包括信号获取模块、信号处理模块以及状态判定模块。
其中,信号获取模块用于获取信号采集装置生成的脉冲信号;信号采集装置设置于扶梯的梯级滚轮轴的一侧,用于感应梯级滚轮轴对应连接的梯级滚轮的旋转角度并生成脉冲信号;信号处理模块用于对脉冲信号进行处理,得到信号峰值间隔时间;信号峰值间隔时间是指脉冲信号中出现峰值的时间间隔;状态判定模块用于在信号峰值间隔时间大于第一时间阈值且小于第一目标时间区间的最小值时,则判定扶梯的压轨高度调整异常;第一时间阈值根据梯级滚轮发生逆转所需的最长时间确定;第一目标时间区间根据目标时间和第一预设时间调整因子确定;目标时间是指梯级滚轮的旋转周期和梯级滚轮与对应的链轮进行咬合所需的时间之和。
第三方面,提供了一种信号处理装置,该信号处理装置包括存储器和处理器,存储器存储有计算机程序,处理器执行所述计算机程序时实现上述方法实施例中任一方法的步骤。
第四方面,提供了一种扶梯压轨高度调整异常检测系统,扶梯压轨高度调整异常检测系统包括:信号采集装置,设置于扶梯的梯级滚轮轴的一侧,用于感应梯级滚轮轴对应连接的梯级滚轮的旋转角度并生成脉冲信号;信号处理装置,连接信号采集装置,信号处理装置包括存储器和处理器,存储器存储有计算机程序,处理器执行所述计算机程序时实现上述方法实施例中任一方法的步骤。
在其中一个实施例中,信号采集装置为角度传感器或光电测距传感器。
在其中一个实施例中,信号处理装置还用于连接扶梯控制系统,并在判定扶梯的压轨高度调整异常时,向扶梯控制系统输出故障预警信息;故障预警信息用于反映扶梯的压轨高度调整存在异常。
第五方面,提供了一种自动扶梯,自动扶梯包括上述系统实施例中的扶梯压轨高度调整异常检测系统。
在其中一个实施例中,自动扶梯还包括扶梯控制系统;信号处理装置还用于在判定扶梯的压轨高度调整异常时,向扶梯控制系统输出故障预警信息;故障预警信息用于反映扶梯的压轨高度调整存在异常;扶梯控制系统连接信号处理装置,用于接收故障预警信息,并根据预警信息进行故障报警。
第六方面,提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时实现上述方法实施例中任一方法的步骤。
上述扶梯压轨高度调整异常的诊断方法、装置、信号处理装置、扶梯压轨高度调整异常检测系统、自动扶梯和存储介质,通过将信号采集装置设置于扶梯的梯级滚轮轴的一侧,并用于感应梯级滚轮轴对应连接的梯级滚轮的旋转角度并生成脉冲信号;而后,通过该信号采集装置获取脉冲信号;接着,对脉冲信号进行处理,得到信号峰值间隔时间;最终,在信号峰值间隔时间大于第一时间阈值且小于第一目标时间区间的最小值,即可准确的判定扶梯的压轨高度调整存在异常。进而,可以避免人为调整管理失控或焊接应力变形导致的压轨高度调整不足,也就避免了扶梯的压轨和梯级滚轮间隙将小于梯级滚轮直径从而出现干涉现象,减小梯级滚轮及压轨过度磨损,增长梯级滚轮及压轨的寿命周期,防止引发自动扶梯停用和安全事故。
附图说明
图1为一个实施例中扶梯压轨高度调整异常的诊断方法的第一流程示意图;
图2为一个实施例中脉冲信号处理步骤的流程示意图;
图3为一个具体示例中第一锯齿波信号波形图;
图4为一个具体示例中第二锯齿波信号波形图;
图5为一个具体示例中第三锯齿波信号波形图;
图6为一个具体示例中第四锯齿波信号波形图;
图7为另一个实施例中扶梯压轨高度调整异常的诊断方法的第二流程示意图;
图8为另一个实施例中扶梯压轨高度调整异常的诊断方法的第三流程示意图;
图9为另一个实施例中扶梯压轨高度调整异常的诊断方法的第四流程示意图;
图10为一个实施例扶梯压轨高度调整异常的诊断装置的结构框图;
图11为一个实施例中信号处理装置的内部结构图;
图12为一个实施例中扶梯压轨高度调整异常检测系统的第一内部结构图;
图13为一个实施例中角度传感器设置位置的结构图;
图14为一个实施例中观点测距传感器设置位置的结构图;
图15为一个实施例中扶梯压轨高度调整异常检测系统的第二内部结构图;
图16为一个实施例中扶梯压轨高度调整异常检测系统的第三内部结构图;
图17为一个实施例中自动扶梯的部结构图。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
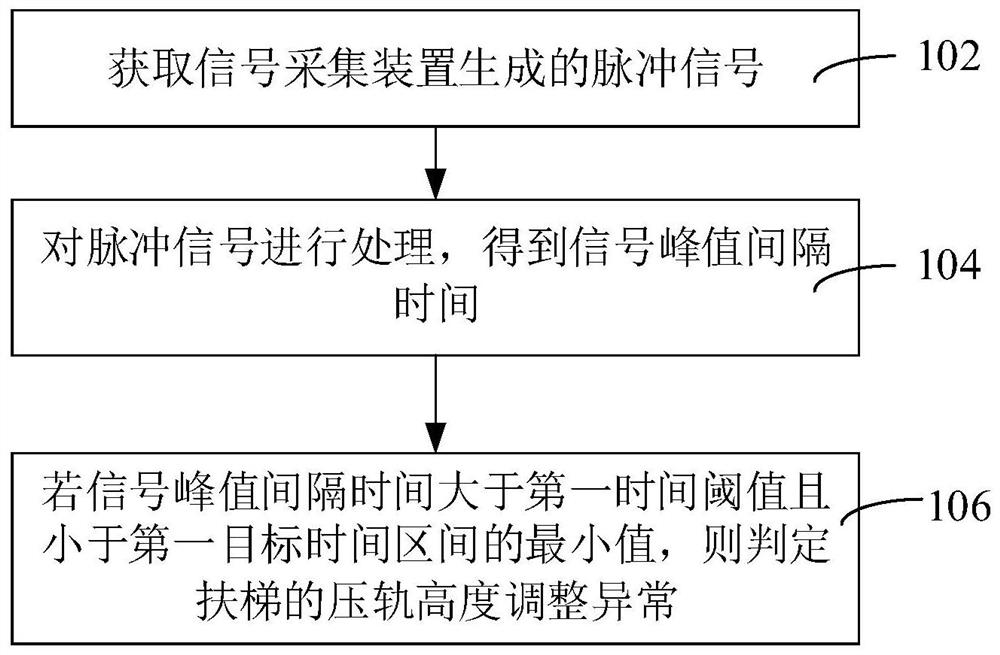
在一个实施例中,如图1所示,提供了一种扶梯压轨高度调整异常的诊断方法,本实施例以该方法应用于信号处理装置进行举例说明。本实施例中,该方法包括以下步骤102至步骤106。
步骤102,获取信号采集装置生成的脉冲信号。
其中,信号采集装置设置于扶梯的梯级滚轮轴的一侧,用于感应梯级滚轮轴对应连接的梯级滚轮的旋转角度并生成脉冲信号。信号处理装置可以通过信号采集装置获取其生成的脉冲信号。
在一个具体示例中,信号采集装置可以是角度传感器,通过角度传感器可以感应梯级滚轮对应连接的梯级滚轮的旋转角度并生成锯齿波信号;信号采集装置还可以是光电测距传感器,通过观点测距传感器可以感应梯级滚轮对应连接的梯级滚轮的旋转角度并生成矩形波信号;以上仅为具体示例,实际应用中可以根据需求而灵活设置,在此不进行限制。
步骤104,对脉冲信号进行处理,得到信号峰值间隔时间。
其中,信号峰值间隔时间是指脉冲信号中出现峰值的时间间隔。信号处理装置可以利用算法对通过信号采集装置获取的脉冲信号进行处理,从而得到信号峰值间隔时间。
在其中一个实施例中,如图2所示,对脉冲信号进行处理,得到信号峰值间隔时间的步骤包括:
步骤201,对脉冲信号进行模数转换,得到目标数字信号。
步骤202,对目标数字信号进行信号分时提取运算,得到信号峰值间隔时间。
信号处理装置对通过信号采集装置获取的脉冲信号进行模数转换处理,从而得到目标数字信号;而后,对该目标数字信号进行信号分时提取运算,即可得到信号峰值间隔时间。
在一个具体示例中,采用峰值捕捉原则对目标数字信号进行信号分时提取运算的过程为:首先,获取信号采集装置的标定输出电压和信号采集装置的精度,即可根据信号采集装置的标定输出电压和信号采集装置的精度计算得到峰值电压范围;例如,信号采集装置的标定输出电压为0~3V,信号采集装置的精度为±5%,也就是说峰值电压≥2.85V,从而可以提取峰值电压≥2.85V对应的第一峰值时刻点t
在本实施例中,通过对脉冲信号进行模数转换,得到目标数字信号;而后,对目标数字信号进行信号分时提取运算,得到准确的信号峰值间隔时间;进而,提高扶梯压轨高度调整异常的诊断方法的准确度和便利性。
步骤106,若信号峰值间隔时间大于第一时间阈值且小于第一目标时间区间的最小值,则判定扶梯的压轨高度调整异常。
其中,第一时间阈值根据梯级滚轮发生逆转所需的最长时间确定;第一目标时间区间根据目标时间和第一预设时间调整因子确定;目标时间是指梯级滚轮的旋转周期和梯级滚轮与对应的链轮进行咬合所需的时间之和。
信号处理装置通过得到的信号峰值间隔时间进行判断,当信号峰值间隔时间大于第一时间阈值且小于第一目标时间区间的最小值,则表示此时扶梯的压轨和梯级滚轮间隙将小于梯级滚轮直径从而出现干涉,信号采集装置采集的锯齿波出现异常,但又不属于扶梯的压轨高度调整正常且梯级滚轮处于正常运转状态、扶梯的压轨高度调整正常且梯级滚轮处于逆转状态以及扶梯的压轨高度调整正常且梯级滚轮处于与对应的链轮进行咬合的状态,所以判定扶梯的压轨高度调整异常。
在一个具体示例中,信号采集装置采用角度传感器,该角度传感器设置在扶梯的梯级滚轮轴的一侧,该扶梯的运行速度为0.65m/s,该梯级扶梯的梯级滚轮的直径为80mm;
所以,该梯级扶梯的梯级滚轮的周长为:
3.14×80=251.2mm;
因为,扶梯的运行速度为0.65m/s;
所以,梯级滚轮转动一周的时间即梯级滚轮的旋转周期为:
所以,该信号采集装置在扶梯的压轨高度调整正常且梯级滚轮处于正常运转状态时,采集的锯齿波信号的波形如图3所示,该锯齿波的周期即梯级滚轮的旋转周期为0.39s。
由于在梯级滚轮运行到下部压轨位置时,梯级滚轮将存在从导轨向压轨进行切换的过程,从而导致梯级滚轮将发生逆转,此过程信号采集装置采集的锯齿波出现反向,如图4所示,根据图4的波形特征可知此过程的信号峰值间隔时间不大于2倍梯级滚轮的旋转周期即梯级滚轮发生逆转所需的最长时间;
因此,第一时间阈值为:
0.39×2=0.78s
由于在梯级滚轮运行到驱动侧或从动侧对应链轮上下沿切点时,梯级滚轮与对应的链轮将咬合运行半个圆周后分离,在此期间梯级滚轮不转动,假设链轮的直径为700mm;所以,此期间信号采集装置采集的锯齿波出现异常,如图5所示,梯级滚轮在此期间的停留时间即梯级滚轮与对应的链轮进行咬合所需的时间为:
所以,目标时间为2.08s,将第一预设时间调整因子设置为0.2s,则第一目标时间区间为:
[2.08-0.2,2.08+0.2]=[1.88,2.28]
在扶梯正常启动运行后,梯级滚轮匀速运行,当压轨高度调整出现异常,扶梯的压轨和梯级滚轮间隙将小于梯级滚轮直径从而出现干涉,导致梯级滚轮出现堵转或者抖动,此时信号采集装置采集的锯齿波出现异常,如图6所示,此时的信号峰值间隔时间大于第一时间阈值且小于第一目标时间区间的最小值;以上仅为具体示例,实际应用中可以根据需求而灵活设置,在此不进行限制。
基于此,通过将信号采集装置设置于扶梯的梯级滚轮轴的一侧,并用于感应梯级滚轮轴对应连接的梯级滚轮的旋转角度并生成脉冲信号;而后,通过该信号采集装置获取脉冲信号;接着,对脉冲信号进行处理,得到信号峰值间隔时间;最终,在信号峰值间隔时间大于第一时间阈值且小于第一目标时间区间的最小值,即可准确的判定扶梯的压轨高度调整存在异常。进而,可以避免人为调整管理失控或焊接应力变形导致的压轨高度调整不足,也就避免了扶梯的压轨和梯级滚轮间隙将小于梯级滚轮直径从而出现干涉现象,减小梯级滚轮及压轨过度磨损,增长梯级滚轮及压轨的寿命周期,防止引发自动扶梯停用和安全事故。
在其中一个实施例中,如图7所示,上述方法还包括:
步骤108,若信号峰值间隔时间属于第二目标时间区间,则判定扶梯的压轨高度调整正常且梯级滚轮处于正常运转状态。
其中,第二目标区间根据梯级滚轮的旋转周期和第二预设时间调整因子确定。在一个具体示例中,梯级滚轮的旋转周期为0.39s,第二预设时间调整因子为0.02s,则第二目标时间区间为:
[0.39-0.02,0.39+0.02]=[0.37,0.41]
以上仅为具体示例,实际应用中可以根据需求而灵活设置,在此不进行限制。
信号处理装置通过得到的信号峰值间隔时间进行判断,当信号峰值间隔时间属于第二目标时间区间,则表示此时信号采集装置采集的锯齿波并未出现异常,判定扶梯的压轨高度调整正常且梯级滚轮处于正常运转状态。因此,通过本实施例可以准确地判定扶梯的压轨高度调整正常且梯级滚轮处于正常运转状态,提高了扶梯压轨高度调整异常的诊断方法的便利性。
在其中一个实施例中,如图8所示,上述方法还包括:
步骤110,若信号峰值间隔时间小于第一时间阈值且不属于第二目标时间区间,则判定扶梯的压轨高度调整正常且梯级滚轮处于逆转状态。
信号处理装置通过得到的信号峰值间隔时间进行判断,当信号峰值间隔时间属于小于第一时间阈值且不属于第二目标时间区间,则表示此时信号采集装置采集的锯齿波因梯级滚轮处于逆转状态导致出现异常,但并未出现扶梯的压轨高度调整异常,所以判定扶梯的压轨高度调整正常且梯级滚轮处于逆转状态。因此,通过本实施例可以准确地判定扶梯的压轨高度调整正常且梯级滚轮处于逆转状态,提高了扶梯压轨高度调整异常的诊断方法的便利性。
在其中一个实施例中,如图9所示,上述方法还包括:
步骤112,若信号峰值间隔时间属于第一目标时间区间,则判定扶梯的压轨高度调整正常且梯级滚轮处于与对应的链轮进行咬合的状态。
信号处理装置通过得到的信号峰值间隔时间进行判断,当信号峰值间隔时间属于第一目标时间区间,则表示此时信号采集装置采集的锯齿波因梯级滚轮处于与对应的链轮进行咬合的状态导致出现异常,但并未出现扶梯的压轨高度调整异常,所以判定扶梯的压轨高度调整正常且梯级滚轮处于与对应的链轮进行咬合的状态。因此,通过本实施例可以准确地判定扶梯的压轨高度调整正常且梯级滚轮处于与对应的链轮进行咬合的状态,提高了扶梯压轨高度调整异常的诊断方法的便利性。
应该理解的是,虽然图1、2、7、8以及9的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,图1、2、7、8以及9中的至少一部分步骤可以包括多个步骤或者多个阶段,这些步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤中的步骤或者阶段的至少一部分轮流或者交替地执行。
在一个实施例中,如图10所示,提供了一种扶梯压轨高度调整异常的诊断装置,该装置包括信号获取模块1010、信号处理模块1020以及状态判定模块1030。
其中,信号获取模块1010用于获取信号采集装置生成的脉冲信号;信号采集装置设置于扶梯的梯级滚轮轴的一侧,用于感应梯级滚轮轴对应连接的梯级滚轮的旋转角度并生成脉冲信号;信号处理模块1020用于对脉冲信号进行处理,得到信号峰值间隔时间;信号峰值间隔时间是指脉冲信号中出现峰值的时间间隔;状态判定模块1030用于在信号峰值间隔时间大于第一时间阈值且小于第一目标时间区间的最小值时,则判定扶梯的压轨高度调整异常;第一时间阈值根据梯级滚轮发生逆转所需的最长时间确定;第一目标时间区间根据目标时间和第一预设时间调整因子确定;目标时间是指梯级滚轮的旋转周期和梯级滚轮与对应的链轮进行咬合所需的时间之和。
在其中一个实施例中,状态判定模块1030用于若信号峰值间隔时间属于第二目标时间区间,则判定扶梯的压轨高度调整正常且梯级滚轮处于正常运转状态;第二目标区间根据梯级滚轮的旋转周期和第二预设时间调整因子确定。
在其中一个实施例中,状态判定模块1030用于若信号峰值间隔时间小于第一时间阈值且不属于第二目标时间区间,则判定扶梯的压轨高度调整正常且梯级滚轮处于逆转状态。
在其中一个实施例中,状态判定模块1030用于若信号峰值间隔时间属于第一目标时间区间,则判定扶梯的压轨高度调整正常且梯级滚轮处于与对应的链轮进行咬合的状态。
在其中一个实施例中,信号处理模块1020包括数模转换单元和提取运算单元。其中,数模转换单元用于对脉冲信号进行模数转换,得到目标数字信号;提取运算单元,用于对目标数字信号进行信号分时提取运算,得到信号峰值间隔时间。
关于扶梯压轨高度调整异常的诊断装置的具体限定可以参见上文中对于扶梯压轨高度调整异常的诊断方法的限定,在此不再赘述。上述扶梯压轨高度调整异常的诊断装置中的各个模块可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个模块对应的操作。
在一个实施例中,提供了一种信号处理装置,该信号处理装置可以是终端,其内部结构图可以如图11所示。该信号处理装置包括通过系统总线连接的处理器、存储器、通信接口、显示屏和输入装置。其中,该信号处理装置的处理器用于提供计算和控制能力。该信号处理装置的存储器包括非易失性存储介质、内存储器。该非易失性存储介质存储有操作系统和计算机程序。该内存储器为非易失性存储介质中的操作系统和计算机程序的运行提供环境。该信号处理装置的通信接口用于与外部的终端进行有线或无线方式的通信,无线方式可通过WIFI、运营商网络、NFC(近场通信)或其他技术实现。该计算机程序被处理器执行时以实现一种扶梯压轨高度调整异常的诊断方法。该信号处理装置的显示屏可以是液晶显示屏或者电子墨水显示屏,该信号处理装置的输入装置可以是显示屏上覆盖的触摸层,也可以是信号处理装置外壳上设置的按键、轨迹球或触控板,还可以是外接的键盘、触控板或鼠标等。
本领域技术人员可以理解,图11中示出的结构,仅仅是与本申请方案相关的部分结构的框图,并不构成对本申请方案所应用于其上的信号处理装置的限定,具体的信号处理装置可以包括比图中所示更多或更少的部件,或者组合某些部件,或者具有不同的部件布置。
在一个实施例中,提供了一种信号处理装置,该信号处理装置包括存储器和处理器,存储器存储有计算机程序,处理器执行所述计算机程序时实现上述方法实施例中任一方法的步骤。
在一个实施例中,如图12所示,提供了一种扶梯压轨高度调整异常检测系统,扶梯压轨高度调整异常检测系统包括信号采集装置1210和信号处理装置1220。
其中,信号采集装置1210设置于扶梯的梯级滚轮轴的一侧,以保证信号采集装置1210与梯级滚轮的旋转角速度一致。信号采集装置1210可以感应梯级滚轮轴对应连接的梯级滚轮的旋转角度并生成脉冲信号。
在一个具体示例中,信号采集装置1210设置的扶梯的梯级滚轮轴可以是梯级前滚轮轴,也可以是梯级后滚轮轴;梯级滚轮轴的一侧既可以是梯级滚轮轴的左侧,也可以是梯级滚轮轴的右侧。以上仅为具体示例,实际应用中可以根据需求而灵活设置,在此不进行限制。
在其中一个实施例中,信号采集装置1210可以为角度传感器,从而通过该角度传感器可以感应梯级滚轮轴对应连接的梯级滚轮的旋转角度并生成锯齿波信号。其中,如图13所示,该角度传感器可以设置在梯级滚轮轴的同心轴线上,且既可以是在梯级滚轮的内侧还可以是在梯级滚轮的外侧,从而保证了信号采集装置1210生成的锯齿波信号不失真,提升了生成的锯齿波信号的准确度。
在其中一个实施例中,信号采集装置1210可以为光电测距传感器,从而通过该光电测距传感器可以感应梯级滚轮轴对应连接的梯级滚轮的旋转角度并矩形波信号;其中,如图14所示,该光电测距传感器可以穿过安装支架1410上的第一固定孔1411固定在安装支架1410上,且安装支架1410通过安装支架1410上的第二固定孔1412固定在梯级滚轮轴上,从而保证了信号采集装置1210生成的矩形波信号不失真,提升了生成的矩形波信号的准确度。
信号处理装置1220,连接信号采集装置1210,信号处理装置1220包括存储器和处理器,存储器存储有计算机程序,处理器执行所述计算机程序时实现上述方法实施例中任一方法的步骤。
在本实施例中,通过设置在扶梯的梯级滚轮轴的一侧的信号采集装置1210感应梯级滚轮轴对应连接的梯级滚轮的旋转角度并生成脉冲信号,并通过信号处理装置1220获取脉冲信号;接着,对脉冲信号进行处理,得到信号峰值间隔时间;最终,在信号峰值间隔时间大于第一时间阈值且小于第一目标时间区间的最小值,即可准确的判定扶梯的压轨高度调整存在异常。进而,可以避免人为调整管理失控或焊接应力变形导致的压轨高度调整不足,也就避免了扶梯的压轨和梯级滚轮间隙将小于梯级滚轮直径从而出现干涉现象,减小梯级滚轮及压轨过度磨损,增长梯级滚轮及压轨的寿命周期,防止引发自动扶梯停用和安全事故。
在其中一个实施例中,信号处理装置1220还用于连接扶梯控制系统,并在判定扶梯的压轨高度调整异常时,向扶梯控制系统输出故障预警信息;故障预警信息用于反映扶梯的压轨高度调整存在异常。因此,通过信号处理装置1220向扶梯控制系统输出故障预警信息,从而便于工作人员通过扶梯控制系统直接了解到扶梯的压轨高度调整是否存在异常。
在其中一个实施例中,信号处理装置1220可以设置在扶梯的任一梯级的底部,从而便于信号处理装置1220和信号采集装置1210进行通信连接。
在其中一个实施例中,如图15所示,扶梯压轨高度调整异常检测系统还包括光电接收器1230;其中,信号采集装置1210连接光电接收器1230,光电接收器1230连接信号处理装置1220;信号采集装置1210可以通过光电接收器1230将生成的脉冲信号传输至信号处理装置1230;因此,通过光电接收器1230提高了信号采集装置1210生成的脉冲信号的传输便利性。
在其中一个实施例中,如图16所示,扶梯压轨高度调整异常检测系统还包括供电电源1240;其中,供电电源1240分别连接信号采集装置1210和信号处理装置1220,并用于向信号采集装置1210和信号处理装置1220供电;因此,通过在扶梯压轨高度调整异常检测系统中设置供电电源1240,提高了扶梯压轨高度调整异常检测系统的便利性。
在其中一个实施例中,供电电源1240可以但不限于是蓄电池;蓄电池可以连接电刷,并通过该电刷与设置在扶梯的梯级运行轨迹上任一处的低压电源触点进行接触,从而完成蓄电池周期性接触式自动充电。
在其中一个实施例中,扶梯压轨高度调整异常检测系统还包括预设数量的感应线圈;感应线圈设置于扶梯的梯级靠近梯级滚轮的一侧,连接供电电源1240,用于向供电电源1240输出感应电流信号;其中,感应线圈的移动方向与设置在梯级滚轮上的磁场垂直,以使感应线圈在梯级滚轮旋转时产生感应电流信号。因此,通过在扶梯压轨高度调整异常检测系统设置感应线圈与梯级滚轮上的磁场进行配合,从而使得供电电源1240利用感应线圈输出感应电流信号进行充电,提高了扶梯压轨高度调整异常检测系统的节能性和便利性。在一个具体示例中,感应线圈的预设数量根据信号处理装置1220的耗电量和供电电源1240的容量确定,以上仅为具体示例,实际应用中可以根据需求而灵活设置,在此不进行限制。
在一个实施例中,提供了一种自动扶梯,自动扶梯包括上述系统实施例中的扶梯压轨高度调整异常检测系统。因此,自动扶梯可以通过设置的扶梯压轨高度调整异常检测系统准确的判定扶梯的压轨高度调整是否存在异常。进而,可以避免人为调整管理失控或焊接应力变形导致的压轨高度调整不足,也就避免了扶梯的压轨和梯级滚轮间隙将小于梯级滚轮直径从而出现干涉现象,减小梯级滚轮及压轨过度磨损,增长梯级滚轮及压轨的寿命周期,防止引发自动扶梯停用和安全事故。
在其中一个实施例中,如图17所示,扶梯还包括扶梯控制系统1710。
信号处理装置1220还用于在判定扶梯的压轨高度调整异常时,向扶梯控制系统1710输出故障预警信息。故障预警信息用于反映扶梯的压轨高度调整存在异常。
扶梯控制系统1710,连接信号处理装置1220,用于接收故障预警信息,并根据预警信息进行故障报警。
在本实施例中,通过信号处理装置1220向扶梯控制系统输出故障预警信息,从而便于工作人员通过扶梯控制系统1710直接了解到扶梯的压轨高度调整是否存在异常,提高了自动扶梯的便利性。
在一个实施例中,一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时实现上述方法实施例中任一方法的步骤。
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本申请所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和易失性存储器中的至少一种。非易失性存储器可包括只读存储器(Read-Only Memory,ROM)、磁带、软盘、闪存或光存储器等。易失性存储器可包括随机存取存储器(Random Access Memory,RAM)或外部高速缓冲存储器。作为说明而非局限,RAM可以是多种形式,比如静态随机存取存储器(Static Random Access Memory,SRAM)或动态随机存取存储器(Dynamic Random Access Memory,DRAM)等。
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
- 扶梯压轨高度调整异常的诊断方法、装置和信号处理装置
- 轨压模拟值生成方法和应用轨压模拟值进行内燃机燃油系统故障诊断方法