一种无人车
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及无人车技术领域,特别是涉及一种无人车。
背景技术
随着城市规模的不断扩大,安防工作在当今社会发挥着越来越重要的作用。长期以来,安防工作一直沿用传统的人工巡逻体制和固定地点摄像头视频监视相结合的方法。人工巡逻的方式由于人员的数量和体力有限,其路线、时间、频率、以及密度都不能完全满足需要,另外,由于工作人员的积极性也不尽相同,在夜间、天气环境不佳的情况下往往出现怠工现象。此外,由于人工巡逻无法将现场的图像等信息实时回传监控中心,这给针对突发事件的指挥决策带来了不便,而固定地点设置摄像头进行视频监视的方式需要安装大量的摄像头和线路,导致成本高且广大区域不可能得到全部覆盖,存在着大量的监测盲区。
通过无人车可以解决人工巡逻以及固定地点设置摄像头视频监视的弊端,但现有的无人车功能单一,大部分类型的无人车只能用于巡逻,不具有其他监测功能,也无法根据所监测的结果及时进行处理。尤其是当下,人们对于空气质量以及湿度等环境的要求越来越高,很多人类活动区域需要长时间保持较高空气质量以及适宜湿度,只能用于巡逻的无人车无法实现这些需求。
发明内容
本发明的目的在于提供一种无人车,以通过监测空气质量信息以及湿度信息并对信息进行处理,以使得活动区域保持较高空气质量以及适宜湿度。
本发明的目的是采用以下的技术方案来实现的。依据本发明提出的一种无人车,包括车体以及监控中心,所述车体的内部设置有中央处理器,所述中央处理器与所述监控中心连接,所述中央处理器被配置为在接收到所述监控中心所发送的目标道路的具体位置数据后,将所述无人车驱动至目标道路,所述车体的顶部表面设有监测机构,所述监测机构包括空气质量监测器以及湿度检测器,所述空气质量监测器以及所述湿度检测器均与所述中央处理器连接,所述监控中心被配置为在通过所述中央处理器接收到所述监测机构所监测的信息后,对信息进行处理。
在一些实施方式中,所述监测机构还包括雷达测速器,所述雷达测速器与所述中央处理器连接。
在一些实施方式中,所述监测机构还包括气象监测器,所述气象监测器与所述中央处理器连接。
在一些实施方式中,所述监测机构还包括气象监测器,所述气象监测器与所述中央处理器连接。
在一些实施方式中,所述无人车还包括调节机构以及支撑板,所述支撑板设置于所述车体的表面,所述调节机构设置在所述支撑板的顶部表面,所述监测机构与所述调节机构连接,所述调节机构用于调节所述监测机构的高度。
在一些实施方式中,所述调节机构包括双向电机、载物板以及伸缩杆,所述双向电机设置在所述支撑板的上表面,所述双向电机的输出端与螺杆固定连接,所述螺杆穿过所述载物板且所述螺杆与所述载物板螺纹连接,所述载物板的顶部固定设置有所述伸缩杆,所述监测机构设置在所述伸缩杆的顶部。
在一些实施方式中,所述双向电机的外侧部套设有安装套,所述安装套的底部通过安装板与所述支撑板固定连接。
在一些实施方式中,所述伸缩杆的外侧部套设有伸缩套,所述伸缩套的底部与所述安装套的顶部表面连接。
在一些实施方式中,所述监测机构还包括设置在所述伸缩杆的顶端的支撑盘,所述空气质量监测器以及所述湿度检测器均设置在所述支撑盘的上方。
本发明的有益效果至少包括:
1、本发明通过车体的内部设置有中央处理器且中央处理器与监控中心连接、中央处理器被配置为在接收到监控中心所发送的目标道路的具体位置数据后,将无人车驱动至目标道路、车体的顶部表面设有监测机构,监测机构包括空气质量监测器以及湿度检测器、空气质量监测器以及湿度检测器均与中央处理器连接、监控中心被配置为在通过中央处理器接收到监测机构所监测的信息后,对信息进行处理,能够使得无人车的活动区域保持较高空气质量以及适宜湿度。
2、本发明通过红外摄像机与中央处理器连接,当红外摄像机在道路上监测遇到堵车或者红绿灯损坏时,无人车能够通过导航以及内置自动行驶至路口中心调控道路上行驶的车辆,利用无人车的车厢的顶部表面设置的交通信号灯指挥交通,同时红外摄像机将道路信息发送至中央处理器,中央处理器将道路信息发送至监控中心对信息进行处理。
3、本发明通过调节机构包括双向电机、载物板以及伸缩杆,双向电机设置在支撑板的上表面且双向电机的输出端与螺杆固定连接、螺杆穿过载物板且螺杆与载物板螺纹连接、载物板的顶部固定设置有伸缩杆,监测机构设置在伸缩杆的顶部,能够控制监测机构的所处高度,从而使得监测机构实现更大范围的监测。
上述说明仅是本发明技术方案的概述,为了能更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
附图说明
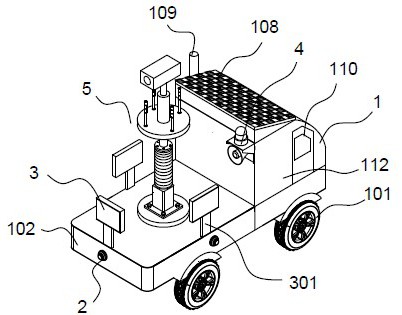
图1示出了根据本发明的一个实施例的无人车的立体结构示意图;
图2示出了根据本发明的一个实施例的无人车的内部结构框图;
图3示出了根据本发明的一个实例的调节机构的结构示意图;
图4示出了根据本发明的一个实施例的调节机构以及监测机构的结构示意图;
图5示出了根据本发明的一个实施例的监测机构的结构示意图。
具体实施方式
为更进一步阐述本发明的技术手段,以下结合附图及较佳实施例,对依据本发明提出的一种无人车的具体实施方式详细说明。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本申请的保护范围。
除非另有定义,本文所使用的所有的技术和科学术语与属于本申请的技术领域的技术人员通常理解的含义相同;本文中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本申请;本申请的说明书和权利要求书及上述附图说明中的术语“包括”以及其任何变形。
在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。“多个”指两个或两个以上。
如图1以及图2所示,本发明所述的无人车包括车体1以及监控中心6,车体1包括车载控制室112以及车厢102,车载控制室112靠近车体1的前端,车厢102靠近车体1的后端,车载控制室112的内部设置有蓄电池103、中央处理器104、存储模块107以及GPS导航仪111,其中,蓄电池103与中央处理器104连接,用于为中央处理器104供电,车载控制室112的外侧部设置有无线收发器109,车厢102的顶部表面设置有多个交通信号灯3,且车载控制室112的前端面也设置有交通信号灯3,车厢102的外侧部以及车载控制器112的前侧部均设置有障碍物监测器2,障碍物监测器2被配置用于检测障碍物。车载控制室112靠近车厢102一侧的顶部设有警报器4。车体1底部设有四个驱动轮101。车载控制室112的顶部设有太阳能发电板108。车体1的车载控制室112上还设置车门110。
在一个或多个实施例中,交通信号灯3通过支撑杆301固定设置在车厢102的顶部表面,支撑杆301与车厢102的顶部表面以及交通信号灯3的底部之间均固定连接。
在一个或多个实施例中,车载控制室112内还设置有操控平台105。
在一个或多个实施例中,车厢102的顶部表面的中央设有调节监测装置5,调节监测装置5包括监测机构507,监测机构507包括气象监测器5071、空气质量监测器5072、雷达测速器5073、湿度检测器5074以及红外摄像机5075,气象监测器5071、空气质量监测器5072、雷达测速器5073、湿度检测器5074以及红外摄像机5075均与中央处理器102连接。
在一个或多个实施例中,车载控制室112内设置的中央处理器102通过无线收发器109与监控中心6连接,无线收发器109与监控中心6之间无线连接。监控中心6被配置为在通过中央处理器102接收到监测机构507所监测的信息后,对信息进行处理。监控中心6可以通过无线收发器109将目标道路的具体位置数据传送至车载控制室112内的中央处理器102,中央处理器102在接收到目标道路的具体位置数据后,通过车载驱动机构106将无人车驱动至目标道路。具体地,中央处理器102与GPS导航仪111连接,用于获取目标道路的导航路线,中央处理器102还与车载驱动机构106 连接,用于向车载驱动机构106发送控制信号,车载驱动机构106与车体1连接,用于驱动车体1移动。
本发明所述的无人车可通过监测机构507的气象监测器5071监测天气信息,并将天气信息反馈给中央处理器102,中央处理器102将天气信息反馈至监控中心6,若天气信息表征适合出行,则无人车继续出行,若天气信息表征不适合出行,则中央处理器102根据天气信息对监控中心6提出不适宜原因。
监控中心6可与外部交通指挥中心(图中未示)连接。监控中心6还包括操作平台604,在无人车出行后,监控中心6的操作平台604可控制无人车的行程,无人车可通过GPS导航仪111导航巡逻。在一个或多个实施例中,无人车可内置AI系统,当红外摄像机5075在道路上监测到堵车或者红绿灯损坏时,无人车能够自动行驶至路口中心调控道路上行驶的车辆,利用无人车的车厢102的顶部表面设置的交通信号灯3指挥交通,同时红外摄像机5075将道路信息发送至中央处理器102,中央处理器102将道路信息发送至监控中心6,监控中心6收到道路信息并发送至交通指挥中心,交通指挥中心做出相应的调整和控制。在一个或多个实施例中,监控中心6还与手机端7、电脑端8、媒体端9以及电台端10连接,并将道路信息发送至手机端7、电脑端8、媒体端9以及电台端10,以提醒人们该道路的路况。
监控中心6可与环保中心(图中未示)连接。本发明所述的无人车还可通过监测机构507的湿度检测器5074检测道路上的湿度,通过监测机构507的空气质量监测器5072检测道路上是否存在灰尘,如果当前道路上湿度过低且存在灰尘,则湿度检测器5074以及空气质量监测器5072分别将所检测的信息发送至中央处理器102,中央处理器102将该信息发送至监控中心6,监控中心6收到该信息并发送至环保中心,环保中心做出相应的调整和控制。在一个或多个实施例中,监控中心6还可将湿度检测器5074以及空气质量监测器5072所检测的信息发送至手机端7、电脑端8、媒体端9以及电台端10,以提醒人们出行时注意,同时无人车可通过警报器4发出预警。
监控中心6可与交管中心连接。本发明所述的无人车还可通过通过雷达测速器5073测量车速,如果当前道路上存在车辆超速,则雷达测速器5073可将所检测的信息发送至中央处理器102,中央处理器102将雷达测速器5073所检测的信息发送至监控中心6,监控中心6收到该信息并发送至交管中心,交管中心做出相应的调整和控制。在一个或多个实施例中,监控中心6还可将雷达测速器5073所检测的信息发送至手机端7、电脑端8、媒体端9以及电台端10,以提醒人们出行时注意。
此外,本发明所述的无人车还可通过障碍物监测器2,使得其在自动驾行驶时可以自行避障。
综上所述,本发明所述的无人车不仅能够实现智能巡逻,而且功能齐全,大大提高了道路的安全性。
如图3以及图4所示,在一个或多个实施例中,调节监测装置5还包括调节机构501以及支撑板502,调节机构501设在支撑板502的上表面,监测机构507设置在调节机构501的上方,且监测机构507与调节机构501连接,调节机构501用于调节监测机构507的高度。
具体地,调节机构501包括设置在支撑板502顶部的双向电机5011、载物板5012以及伸缩杆5013,双向电机5011的顶部设置有载物板5012,且双向电机5011的输出端与螺杆(图中未示)固定连接,用于驱动螺杆转动,螺杆穿过载物板5012且螺杆与载物板5012螺纹连接,双向电机5011能够带动载物板5012升降运动。载物板5012的顶部设置有伸缩杆5013,伸缩杆5013竖直设置,载物板5012的顶部与伸缩杆5013的底端通过螺纹件固定连接,监测机构507设在伸缩杆5013的顶部,双向电机5011与支撑板502通过螺纹件固定连接。
在一个或多个实施例中,双向电机5011的外侧部套设有安装套504,安装套504的底部通过安装板503与支撑板502之间通过螺纹件固定连接。
在一个或多个实施例中,伸缩杆5013的外侧部套设有伸缩套505。伸缩套505的底部与安装套504的顶部表面连接。
监测机构507还包括设置在伸缩杆5013顶端的支撑盘5077,气象监测器5071、空气质量监测器5072、雷达测速器5073、湿度检测器5074以及红外摄像机5075均设置在支撑盘5077的上方。在一个或多个实施例中,红外摄像机5075的底部通过调节座5076设置在支撑盘5077顶部表面的中心处,支撑盘5077的底部通过连接杆(图中未示)与伸缩杆5013的顶部连接。
本发明通过设置调节机构501,使得在无人车巡逻时可以自动调节高度。
在一个或多个实施例中,气象监测器5071、空气质量监测器5072、雷达测速器5073以及湿度检测器5074均通过螺纹件固定在支撑盘5077顶部。
在一个或多个实施例中,调节座5076的底部与支撑盘5077顶部表面固定连接,红外摄像机5075通过螺纹件固定在调节座5076的顶部。
在一个或多个实施例中,监控中心6还内设有控制器601、预警平台603以及显示平台602。
在一个或多个实施例中,存储模块107、调节机构501、警报器4、操控平台105、太阳能发电板108、GPS导航仪111以及障碍物监测器2均与中央处理器104连接。
提供所公开的方面的以上描述以使本领域的任何技术人员能够实施本发明。对这些方面的各种修改对于本领域技术人员而言是显而易见的,并且在此定义的一般原理可以应用于其他方面而不脱离本发明的范围。因此,本发明不意图被限制到在此示出的方面,而是按照与在此公开的原理和新颖的特征一致的最宽范围。
- 一种用于无人快递车的防破坏报警系统及无人快递车
- 一种无人车和无人机协同工作系统
- 无人车的控制方法及无人车
- 无人车黑匣子的数据监测方法和装置、无人车黑匣子
- 无人车控制系统、无人车和无人车控制方法
- 无人车、无人车作业系统和无人车作业方法