远程辅助系统以及远程辅助方法
文献发布时间:2023-06-19 19:18:24
技术领域
本公开涉及向远程操作员(operator)发送车辆的远程辅助(支援)请求的远程辅助系统以及远程辅助方法。
背景技术
专利文献1中公开了一种涉及用于减轻操作员的负担的远程操作系统的技术。该技术的远程操作系统具备:车辆,其对管控中心进行远程操作请求;以及管控中心,其设置有对发出远程操作请求的车辆进行远程操作的远程操作装置。车辆在进入远程操作对象区域的情况下对管控中心进行远程操作请求。而且,在远程操作对象的车辆从当前在行驶的远程操作对象区域脱离的情况下,向该车辆发送远程操作结束通知。
现有技术文献
专利文献1:日本特开2017-147626号公报
发明内容
发明所要解决的问题
在上述专利文献1的技术中,远程操作要持续到远程操作对象的车辆从当前在行驶的远程操作对象区域脱离为止。在该情况下,远程操作员的受约束时间可能会变长。
本公开是鉴于上述这种问题而做出的,其目的在于提供能够尽量缩短进行自动驾驶车辆的远程辅助的远程操作员的受约束时间的远程辅助系统以及远程辅助方法。
用于解决问题的技术方案
为了解决上述问题,本公开应用于远程辅助系统,该远程辅助系统在判断为由于自动驾驶中的车辆与一个或多个回避对象车辆在预定区域内接近而成为难以继续自动驾驶的远程辅助请求状况的情况下,委托远程操作员进行用于通过预定区域的远程辅助。远程辅助系统具备存储有至少一个程序的至少一个存储装置、以及与至少一个存储装置结合的至少一个处理器。在判断为成为远程辅助请求状况的情况下,至少一个处理器通过执行至少一个程序,构成为执行以下处理:显示处理,将一个或多个回避对象车辆的信息显示于远程操作员的显示装置;受理处理,受理由远程操作员从显示出的一个或多个回避对象车辆的信息中指定的成为允许起步的基准的起步基准车辆的信息;判定处理,判定起步基准车辆是否通过了预定区域;和车辆控制处理,在判定为起步基准车辆通过了预定区域的情况下,通过自动驾驶,使车辆通过预定区域。
在本公开中,车辆控制处理也可以构成为,到判定为起步基准车辆通过了预定区域为止,通过自动驾驶,使车辆在预定等待位置等待。
在本公开中,显示处理也可以构成为,将一个或多个回避对象车辆中的每一个与识别信息一起显示于俯瞰图,受理处理也可以构成为,受理远程操作员对识别信息的选择。
在本公开中,显示装置也可以是触摸面板显示器。显示处理也可以构成为,将包含一个或多个回避对象车辆中的每一个的俯瞰图显示于触摸面板显示器,受理处理也可以构成为,从触摸面板显示器受理起步基准车辆的指定。
在本公开中,显示处理也可以构成为,显示将一个或多个回避对象车辆中的任一个指定为起步基准车辆的确认消息。另外,受理处理也可以构成为,受理针对确认消息的正确与否。
在本公开中,在判断为成为远程辅助请求状况的情况下,至少一个处理器通过执行至少一个程序,也可以构成为运算一个或多个回避对象车辆通过预定区域的预测通过顺序,也可以构成为在通过受理处理受理到起步基准车辆后,预测通过顺序发生了变化的情况下,取消所受理的起步基准车辆。
另外,本公开应用于远程辅助方法,该远程辅助方法在判断为由于自动驾驶中的车辆与一个或多个回避对象车辆在预定区域内接近而成为难以继续自动驾驶的远程辅助请求状况的情况下,委托远程操作员进行用于通过预定区域的远程辅助。远程辅助方法包括:在判断为成为远程辅助请求状况的情况下,将一个或多个回避对象车辆的信息显示于远程操作员的显示装置,受理由远程操作员从显示出的一个或多个回避对象车辆的信息中指定的成为允许起步的基准的起步基准车辆的信息,判定起步基准车辆是否通过了预定区域,在判定为起步基准车辆通过了预定区域的情况下,通过自动驾驶,使车辆通过预定区域。
发明效果
根据本公开,在判断为成为远程辅助请求状况的情况下,远程操作员从显示于显示装置的一个或多个回避对象车辆的信息中指定成为允许起步的基准的起步基准车辆。根据这种构成,无需将远程操作员约束到车辆通过预定区域为止,因此能够缩短远程操作员的受约束时间。
附图说明
图1是表示用于对实施方式1的远程辅助系统的概要进行说明的构成例的框图。
图2是表示自动驾驶车辆的构成的一例的框图。
图3是用于说明在远程辅助系统中执行远程辅助的状况的一例的图。
图4是表示显示于远程操作员接口(interface)的显示装置的显示信息的一例的图。
图5是表示远程操作员接口的输入装置的一例的图。
图6是表示实施方式1的自动驾驶控制装置所具备的功能的一部分的功能块图。
图7是在实施方式1的自动驾驶控制装置中执行的处理的流程图。
图8是表示在远程辅助判定部中进行的远程辅助需要与否判定处理的例程(routine)的流程图。
图9是表示远程辅助系统的第1应用例的图。
图10是表示远程辅助系统的第2应用例的图。
图11是表示远程辅助系统的第3应用例的图。
图12是表示远程辅助系统的第4应用例的图。
图13是表示显示信息INF1的显示方式的变形例的图。
图14是用于说明实施方式2的远程辅助系统的特征的图。
图15是用于说明实施方式2的远程辅助系统的特征的图。
图16是用于说明实施方式2的远程辅助系统的特征的图。
图17是表示实施方式2的自动驾驶控制装置所具备的功能的一部分的功能块图。
图18是在实施方式2的自动驾驶控制装置中执行的处理的流程图。
标号说明
2远程辅助装置;4远程服务器;6远程操作员接口;10自动驾驶车辆(车辆);30信息取得装置;31车辆位置传感器;32周边状况传感器;33车辆状态传感器;40自动驾驶控制装置;42处理器;44存储装置;46输入输出接口;50通信装置;60行驶装置;62显示装置;64输入装置;100远程辅助系统;402周边环境信息取得部;404车辆运动信息取得部;406地图信息取得部;410识别部;412目标(物标)检测部;414目标跟踪部;420行驶计划部;421第一行驶计划生成部;422远程辅助判定部;423目标通过判定部;424第二行驶计划生成部;425目标通过顺序变化判定部;430车辆控制部;440程序;442各种信息;444地图数据库。
具体实施方式
以下,参照附图对本发明的实施方式进行说明。但是,在以下所示的实施方式中提及到各要素的个数、数量、量、范围等数的情况下,除了特别明示的情况、在原理上明确确定为该数的情况以外,本发明不限定于上述所提及的数。另外,关于在以下所示的实施方式中说明的构造、步骤等,除了特别明示的情况、在原理上明确确定为该构造、步骤等的情况以外,对于本发明而言不一定是必须的。
实施方式1.
1-1.实施方式1的远程辅助系统的整体构成
首先,说明实施方式1的远程辅助系统的概略构成。图1是表示用于对实施方式1的远程辅助系统的概要进行说明的构成例的框图。图1所示的远程辅助系统100是用于对自动驾驶车辆10进行用于辅助自动驾驶车辆10的行驶的远程辅助的系统。以下,也将远程辅助系统100所利用的自动驾驶车辆10简单记作“车辆10”。
远程辅助对车辆10的周边环境的认知或者判断的一部分进行辅助。远程辅助由在远程待命的远程操作员进行。远程辅助系统100所利用的远程操作员的数量不限。另外,远程辅助系统100所利用的车辆10的台数也不限。
如图1所示,远程辅助系统100包括车辆10以及远程辅助装置2。远程辅助装置2包括远程服务器4以及用于远程操作员进行远程辅助的输入输出的远程操作员接口6。远程服务器4经由通信网络N与车辆10可通信地连接。远程服务器4由车辆10发送各种信息。远程操作员接口6具备在驾驶辅助中显示从车辆10发送的信息的显示装置62以及用于输入信息的输入装置64。显示装置62和输入装置64例如也可以是具有显示功能和输入功能的触摸面板显示器。此外,关于远程辅助装置2的构成,能够采用公知的技术,因此省略此处的详细说明。
在远程辅助系统100中,车辆10在要通过被判定为需要远程辅助的预定区域的情况下,对远程辅助装置2进行远程辅助请求。此处的远程辅助是对能否通过预定区域的判断。通过预定区域例如是在交叉路口右转通过。在远程辅助系统100中,根据从车辆10发送的远程辅助请求,远程操作员经由远程辅助装置2进行远程辅助。典型地,远程操作员向远程操作员接口6进行通过判断信息的输入。远程服务器4经由通信网络N向车辆10发送通过判断信息。车辆10根据从远程辅助装置2发送的通过判断信息进行自动驾驶,通过预定区域。此外,本实施方式的远程辅助系统100的远程操作员输入的通过判断信息的内容具有特征。关于通过判断信息,稍后说明其详情。
1-2.实施方式1的自动驾驶车辆的构成
接着,说明实施方式1的远程辅助系统100所应用的自动驾驶车辆10的与自动驾驶相关的构成的一例。图2是表示自动驾驶车辆10的构成的一例的框图。车辆10是能够自动驾驶的自动驾驶车辆。作为此处的自动驾驶,设想为SAE(Society of AutomotiveEngineers:国际汽车工程师学会)的等级定义中的3级以上的自动驾驶。此外,车辆10的动力源不限。
车辆10具备自动驾驶控制装置40。自动驾驶控制装置40具有用于根据从远程操作员发送的远程辅助信息进行车辆10的自动驾驶的功能。自动驾驶控制装置40上连接有信息取得装置30、通信装置50以及行驶装置60。
信息取得装置30构成为包括车辆位置传感器31、周边状况传感器32以及车辆状态传感器33。
车辆位置传感器31检测车辆10的位置和方位。例如,车辆位置传感器31包括GPS(Global Positioning System,全球定位系统)传感器。GPS传感器接收从多个GPS卫星发送的信号,基于接收信号计算车辆10的位置和方位。车辆位置传感器31也可以进行周知的自身位置推定处理(localization,定位),提高车辆10的当前位置的精度。由车辆位置传感器31检测出的信息作为周边环境信息的一部分而随时发送给自动驾驶控制装置40。
周边状况传感器32识别车辆10的周边信息。例如,作为周边状况传感器32,可例示摄像头(拍摄装置)、激光雷达(LIDAR:Laser Imaging Detection and Ranging)和雷达等。周边信息包含由周边状况传感器32识别出的目标信息。作为目标,可例示周边车辆、行人、路侧物、障碍物、白线、信号灯等。目标信息包含目标相对于车辆10的相对位置和相对速度。在周边状况传感器32中识别出的信息作为周边环境信息的一部分而随时发送给自动驾驶控制装置40。
车辆状态传感器33检测表示车辆10的状态的车辆信息。作为车辆状态传感器33,可例示车速传感器、横向加速度传感器、偏航率传感器等。由车辆状态传感器33检测出的信息作为车辆运动信息的一部分而随时发送给自动驾驶控制装置40。
通信装置50与车辆和外部进行通信。例如,通信装置50经由通信网络N与远程辅助装置2进行各种信息的发送和接收。另外,通信装置50与路侧设备、周边车辆、周围的基础设施等外部装置进行通信。路侧设备例如是发送拥堵信息、按车道区分的交通信息、暂时停止等限制信息、死角位置的交通状况的信息等的信标装置。另外,在外部装置为周边车辆的情况下,通信装置50在与周边车辆之间进行车车间通信(V2V通信)。再者,在外部装置为周边的基础设施的情况下,通信装置50在与周围的基础设施之间进行路车间通信(V2I通信)。
行驶装置60包括转向装置、驱动装置以及制动装置。转向装置使车辆10的车轮转向。驱动装置是产生车辆10的驱动力的驱动源。作为驱动装置,可例示发动机或者电动机。制动装置使车辆10产生制动力。行驶装置60基于与车辆10的转向、加速和减速有关的行驶控制量来控制车辆10的行驶。
自动驾驶控制装置40是进行自动驾驶和远程自动驾驶中的各种处理的信息处理装置。典型地,自动驾驶控制装置40是具备至少一个处理器42、至少一个存储装置44以及至少一个输入输出接口46的微型计算机。自动驾驶控制装置40也被称为ECU(ElectronicControl Unit,电子控制单元)。
存储装置44中存储各种信息442。例如,各种信息442包含上述的周边环境信息和车辆运动信息。作为存储装置44,可例示易失性存储器、非易失性存储器、HDD(Hard DiskDrive)等。
存储装置44中存储有地图数据库444。地图数据库444是存储地图信息的数据库。地图信息包含道路的位置信息、道路形状的信息、车道数量、车道宽度、交叉路口和分叉路口的位置信息、道路的优先级等表示交通环境的交通环境信息等。此外,地图数据库444也可以存储于远程辅助装置2的远程服务器4等能够与车辆10通信的服务器。
处理器42包括CPU(Central Processing Unit)。处理器42与存储装置44和输入输出接口46相结合。存储装置44中存储有与自动驾驶相关的至少一个程序440。处理器42读取并执行存储于存储装置44的程序440,由此实现自动驾驶控制装置40的各种功能。
输入输出接口46是用于与远程辅助装置2之间交换信息的接口。在自动驾驶控制装置40中生成的各种信息以及后述的远程辅助请求经由输入输出接口46向远程辅助装置2输出。
1-3.实施方式1的远程辅助系统的特征
接着,对在实施方式1的远程辅助系统100中由远程操作员执行远程辅助的状况的一例进行说明。图3是用于说明在远程辅助系统中执行远程辅助的状况的一例的图。
在远程辅助系统100中,在判断为成为车辆10应该对远程辅助装置2进行远程辅助请求的状况、即远程辅助请求状况的情况下,对远程辅助装置2进行远程辅助请求。这种远程辅助请求状况例如是车辆10要进入“自身车辆并非优先的位置”或者“自身车辆的优先级与其他车辆同等的位置”的状况。远程辅助请求状况例如也可以包含能够根据地图信息判断的状况要素而被预先设定。典型地,远程辅助请求状况是车辆10要伴随着特定的状况要素通过能够根据地图信息判断的预定区域的状况。作为这种远程辅助请求状况,例如可例示车辆10在特定的交叉路口右转的状况、车辆10在特定的交叉路口暂时停止后直行或左转的状况、车辆10开始变道的状况、车辆10为了回避停泊车辆而跨越车道并通过的状况等。
图3所示的交通环境是车道L1与车道L2交叉的交叉路口I1。车道L2相对于车道L1为优先车道。车辆10在车道L1上朝向交叉路口I1行驶。车辆V1在车道L1上从与车辆10相反的方向朝向交叉路口I1行驶。车辆V2从车辆10的左方向在车道L2上朝向交叉路口I1行驶。
车辆10的自动驾驶控制装置40生成了从车道L1在交叉路口右转而向车道L2行驶的行驶计划。在该情况下,当车辆10接近交叉路口I1时,自动驾驶控制装置40识别出车辆10要进入非优先车道的状况,判断为成为远程辅助请求状况。自动驾驶控制装置40向远程辅助装置2发出远程辅助请求REQ,并且发送后述的显示信息INF1。
受到远程辅助请求REQ的远程辅助装置2进行由远程操作员实现的远程辅助。典型地,远程辅助装置2将接收到的显示信息INF1显示于显示装置62。以下,将该处理称为“显示处理”。远程操作员参照显示于显示装置62的显示信息INF1,进行交叉路口I1的通过判断。而且,远程操作员通过操作远程操作员接口6,向车辆10发出远程指示。
在此,例如在远程辅助系统的远程指示包括行驶装置60的操作量的情况下,从受到远程辅助请求REQ的时间点起,远程操作员被约束直到车辆V1或V2通过交叉路口I1并且之后车辆10实际在交叉路口I1右转通过的时间点为止。
另外,在远程辅助系统的远程指示包括“右转开始”等动作开始定时(timing)的远程指示的情况下,从受到远程辅助请求REQ的时间点起,远程操作员被约束直到车辆V1或V2通过交叉路口I1并且之后发出动作开始指示的时间点为止。如此,在远程操作员直接远程指示车辆10的行驶开始定时的构成中,存在会长时间约束远程操作员这一问题。
于是,实施方式1的远程辅助系统100从远程操作员受理对相对于车辆10而成为通过判断的对象的车辆的指定。以下,将该处理称为“受理处理”。图4是表示显示于远程操作员接口的显示装置的显示信息的一例的图。在该图中,在交叉路口I1的俯瞰图上表现出车辆10、附带有作为识别信息的“A”的其他车辆、和附带有作为识别信息的“B”的其他车辆。另外,在俯瞰图上也图示出车辆10在交叉路口I1的目标路径R1。
在受理处理中,远程操作员参照显示于显示装置62的俯瞰图,指定车辆10在按照目标路径R1在交叉路口I1右转时应该作为允许起步的基准的先行通过车辆。在以下的说明中,将该车辆称为“起步基准车辆”。图5是表示远程操作员接口的输入装置的一例的图。在该图所示的例子中,输入装置64设置有与作为显示于显示装置62的附于其他车辆的识别信息的记号对应的按钮。远程操作员按下带有应作为起步基准的车辆的记号的按钮。在图4所示的例子中,不仅是在车道L1的对向车道上朝向交叉路口I1行驶的“B”的车辆,还需要等待在车道L2上从车辆10的左侧朝向交叉路口I1行驶的“A”的车辆的通过。因此,远程操作员按下“A”的按钮。以下,将由远程操作员指定的起步基准车辆的信息称为“起步基准信息INF2”。起步基准信息INF2作为远程指示而向车辆10发送。车辆10根据接收到的远程指示中包含的起步基准车辆通过了交叉路口I1这一情况,起步并在交叉路口I1右转。
根据这种动作,远程操作员无需等待起步基准车辆通过交叉路口就能够完成远程辅助。由此,与指示起步定时的情况相比,能够缩短操作员的受约束时间。
以下,对实施方式1的远程辅助系统100的自动驾驶控制装置40的功能结构以及具体的处理进行说明。
1-4.自动驾驶控制装置的功能结构
接着,对自动驾驶控制装置40的功能结构的一例进行说明。图6是表示自动驾驶控制装置40所具备的功能的一部分的功能块图。自动驾驶控制装置40具备周边环境信息取得部402、车辆运动信息取得部404、地图信息取得部406、识别部410、行驶计划部420以及车辆控制部430。
周边环境信息取得部402以及车辆运动信息取得部404是用于分别取得由信息取得装置30检测出的周边环境信息以及车辆运动信息的功能块。地图信息取得部406是用于取得存储于地图数据库444的地图信息的功能块。
识别部410是用于识别存在于车辆10周边的车辆、行人等目标的功能块。识别部410包括目标检测部412以及目标跟踪部414。目标检测部412使用由周边环境信息取得部402取得的周边环境信息以及车辆运动信息,检测车辆10周边的目标。此处的目标检测方法不限。
目标跟踪部414进行目标检测部412的上一次检测结果与本次检测结果的关联。典型地,在本次检测结果的目标与上一次检测结果相同的情况下,目标跟踪部414分配与上一次检测结果相同的目标ID。另外,在本次检测结果的目标与上一次检测结果不同的情况下,目标跟踪部414对本次检测结果的目标分配新的目标ID。将所分配的目标ID与位置、速度等信息一起作为目标ID信息发送到行驶计划部420。
行驶计划部420是用于生成用于车辆10的自动驾驶的行驶计划的功能块。行驶计划部420包括第一行驶计划生成部421、远程辅助判定部422、目标通过判定部423以及第二行驶计划生成部424。
第一行驶计划生成部421使用地图信息取得部406取得的地图信息、和车辆运动信息取得部404取得的车辆10的当前位置、车速等车辆运动信息,生成用于车辆10按照地图来行驶的行驶轨迹(轨道)TR1。行驶轨迹TR1的生成方法不限。
远程辅助判定部422判定是否需要由远程操作员进行远程辅助。此处的远程辅助是用于车辆10通过预定区域的通过判断。典型地,远程辅助判定部422使用从目标跟踪部414发送来的目标ID信息,生成有可能与车辆10发生碰撞的一个或多个回避对象车辆的预测轨迹TR2。
远程辅助判定部422计算预测轨迹TR2与行驶轨迹TR1交叉的预测碰撞位置CP。远程辅助判定部422基于预测碰撞位置CP,判定车辆10是否有可能与回避对象车辆碰撞。在不存在预测碰撞位置CP的情况下,远程辅助判定部422判定为不需要远程辅助请求。另外,在存在预测碰撞位置CP的情况下,远程辅助判定部422使用地图信息或者周边环境信息判定预测碰撞位置CP处的交通优先状况。而且,在预测碰撞位置CP处的交通优先状况为车辆10优先的状况的情况下,远程辅助判定部422判定为不需要远程辅助请求。另外,在预测碰撞位置CP处的交通优先状况为车辆10非优先的状况的情况下,远程辅助判定部422判定为需要远程辅助请求。
在判定为需要远程辅助请求的情况下,远程辅助判定部422将远程辅助请求REQ和显示信息INF1发送给远程辅助装置2。显示信息INF1是远程操作员进行远程指示所需的信息,例如是在俯瞰图上配置有车辆10、车辆10的行驶轨迹TR1和回避对象车辆的信息。
远程操作员受到远程辅助请求REQ,参照显示于显示装置62的显示信息INF1,从输入装置64指定起步基准车辆。远程辅助装置2将与被指定的起步基准车辆对应的目标ID信息作为起步基准信息INF2发送给目标通过判定部423。
目标通过判定部423执行判定由远程操作员指定的起步基准车辆是否通过了预定区域的判定处理。典型地,目标通过判定部423基于从远程辅助装置2接收到的起步基准信息INF2、和从目标跟踪部414发送来的目标ID信息,确定起步基准车辆,并判定该起步基准车辆是否通过了预定区域。将判定结果发送到第二行驶计划生成部424。
第二行驶计划生成部424在收到起步基准的车辆目标没有通过预定区域的判定结果的情况下,生成基于要在预定等待位置SP停止的行驶计划的行驶轨迹TR3。此处的预定等待位置SP是车辆10等待来自远程操作员的指示的位置,例如可例示交叉路口跟前的停止线的位置等。或者,在收到起步基准的车辆目标通过了预定区域的判定结果的情况下,第二行驶计划生成部424生成基于要起步并通过预定区域的行驶计划的行驶轨迹TR4。将生成的行驶轨迹TR3或者TR4发送到车辆控制部430。
车辆控制部430运算用于实现行驶轨迹TR1、TR3或者TR4的与车辆10的转向、加速和减速有关的行驶控制量。将运算出的行驶控制量向行驶装置60输出。以下,将在第二行驶计划生成部424以及车辆控制部430中执行的处理称为“车辆控制处理”。行驶装置60按照通过车辆控制处理运算出的行驶控制量,控制车辆10的行驶。
1-5.自动驾驶控制装置所执行的具体处理
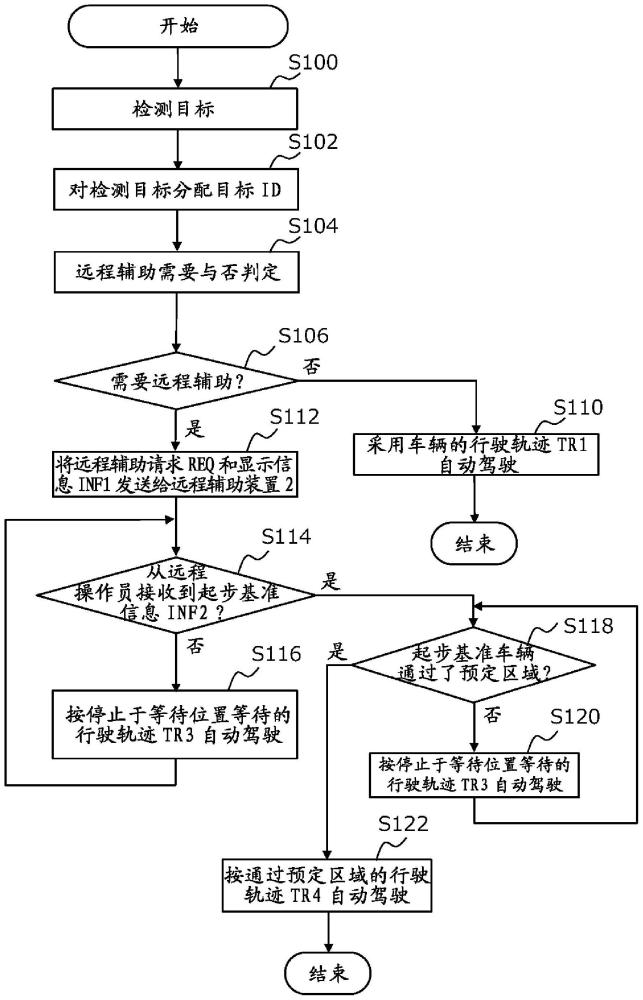
图7是在自动驾驶控制装置40中执行的处理的流程图。图7所示的例程在车辆10的自动驾驶期间通过由自动驾驶控制装置40的处理器42执行存储于存储装置44的程序440来执行。
在图7所示的例程的步骤S100中,首先,在目标检测部412中检测车辆10周边的目标。在接下来的步骤S102中,在目标跟踪部414中,对在步骤S100中检测出的目标分配目标ID。进行步骤S102的处理后,处理进入步骤S104。
在步骤S104中,在远程辅助判定部422中判定是否需要远程辅助。图8是表示在远程辅助判定部422中进行的远程辅助需要与否判定处理的例程的流程图。在步骤S104中,执行图8所示的例程。
在图8所示的例程的步骤S130中,生成检测目标的预测轨迹TR2。在接下来的步骤S132中,计算预测碰撞位置CP,该预测碰撞位置CP是在第一行驶计划生成部421中生成的车辆10的行驶轨迹TR1与在步骤S130中生成的检测目标的预测轨迹TR2交叉的位置。在接下来的步骤S134中,判定行驶轨迹TR1与预测轨迹TR2是否交叉。在此,当在步骤S132中计算出有效的预测碰撞位置CP的情况下,判定为行驶轨迹TR1与预测轨迹TR2交叉。
在步骤S134的处理中,判定为行驶轨迹TR1与预测轨迹TR2不交叉的情况下,处理进入步骤S136,判定为不需要远程辅助请求。
另一方面,在步骤S134的处理中,判定为行驶轨迹TR1与预测轨迹TR2交叉的情况下,处理进入步骤S138。在步骤S138中,基于地图信息和预测碰撞位置CP,判定车辆10相对于检测目标的交通环境在预测碰撞位置CP处是否非优先。其结果,在预测碰撞位置处车辆10非优先的情况下,处理进入步骤S140,判定为需要远程辅助请求。另一方面,在车辆10不是非优先的情况下,处理进入步骤S136,判定为不需要远程辅助请求。
重新回到图7所示的流程图,在步骤S106的处理中,判定是否需要远程辅助。在此,判定在图8所示的流程图的处理中是否判定为需要远程辅助请求。其结果,在判定为不需要远程辅助请求的情况下,处理进入步骤S110。在步骤S110中,采用在第一行驶计划生成部421中生成的车辆10的行驶轨迹TR1,继续车辆10的自动驾驶。进行步骤S110的处理后,本例程结束。
另一方面,在步骤S106的处理中,判定为需要远程辅助的情况下,处理进入步骤S112。在步骤S112中,向远程辅助装置2发送远程辅助请求REQ和显示信息INF1。在远程辅助装置2中,使显示信息INF1显示于显示装置62。远程操作员通过参照显示于显示装置62的显示信息INF1,从输入装置64指定起步基准车辆。远程辅助装置2将包含与所指定的车辆对应的目标ID信息的起步基准信息INF2发送给目标通过判定部423。
在步骤S114中,判定是否从远程辅助装置2接收到起步基准信息INF2。其结果,在尚未接收到起步基准信息INF2的情况下,处理进入步骤S116,在接收到起步基准信息INF2的情况下,处理进入步骤S118。在步骤S116中,车辆10按基于在第二行驶计划生成部424中生成的在预定等待位置SP停止而等待的行驶计划的行驶轨迹TR3来自动驾驶。进行步骤S116的处理后,处理再次回到S114。
在步骤S118中,基于目标ID信息,判定起步基准车辆是否通过了预定区域。其结果,在起步基准车辆尚未通过预定区域的情况下,处理进入步骤S120,在起步基准车辆通过了预定区域的情况下,处理进入步骤S122。
在步骤S120中,与步骤S116的处理同样地,车辆10按基于在预定等待位置SP停止而等待的行驶计划的行驶轨迹TR3来自动驾驶。执行步骤S120的处理后,处理再次回到步骤S118。
在步骤S122中,在第二行驶计划生成部424中运算用于实现行驶轨迹TR4的车辆控制量。将运算出的车辆控制量发送到行驶装置60。行驶装置60根据车辆控制量进行车辆10的自动驾驶。由此,车辆10通过预定区域。
如此,根据实施方式1的远程辅助系统100,在车辆10成为需要远程辅助的状况的情况下,远程操作员仅指示起步基准车辆,而无需指示车辆10的起步定时。由此,能够减少远程操作员的受约束时间,因此,远程操作员的负担减轻。
1-6.对于具体的交通环境状况的应用例
实施方式1的远程辅助系统100能够应用于各种交通环境状况。以下,对几种交通环境状况下的预定区域和预定等待位置的应用例进行说明。
1-6-1.第1应用例
图9是表示远程辅助系统的第1应用例的图。图9中描绘有车道L1与车道L2交叉的交叉路口I2、和在车道L1上行驶的车辆10。车辆10预定在交叉路口I2右转。在第1应用例中,预定区域为交叉路口I2,预定等待位置SP是车道L1上的交叉路口I2跟前的位置。自动驾驶控制装置40将远程辅助请求REQ发送给远程辅助装置2,并且按照用于在交叉路口跟前等待的行驶轨迹TR3进行自动驾驶。而且,由远程操作员指示的起步基准车辆通过交叉路口I2之后,车辆10按照用于在交叉路口I2右转的行驶轨迹TR4进行自动驾驶。
1-6-2.第2应用例
图10是表示远程辅助系统的第2应用例的图。图10中描绘有车道L1与车道L2交叉的交叉路口I3、和在车道L1上行驶的车辆10。车道L2相对于车道L1为优先车道。因此,在车道L1上,在交叉路口I3跟前设置有停止线。车辆10预定在交叉路口I3左转或直行。在第2应用例中,预定区域为交叉路口I3,预定等待位置SP是车道L1上的交叉路口跟前的停止线的位置。自动驾驶控制装置40将远程辅助请求REQ发送给远程辅助装置2,并且按照用于在交叉路口I3的临时停止线等待的行驶轨迹TR3进行自动驾驶。而且,由远程操作员指示的起步基准车辆通过交叉路口I3之后,车辆10按照在交叉路口I3直行或左转的行驶轨迹TR4进行自动驾驶。
1-6-3.第3应用例
图11是表示远程辅助系统的第3应用例的图。图11中描绘有车道L3、与车道L3相邻的车道L4、停泊在车道L3上的停泊车辆V3、和在车道L3上行驶并从停泊车辆V3的后方接近的车辆10。车辆10预定从车道L3向车道L4侧跨越车道以回避停泊车辆V3。在第3应用例中,预定区域为停泊车辆V3的泊车区域,预定等待位置SP是停泊车辆V3后方的位置。自动驾驶控制装置40将远程辅助请求REQ发送给远程辅助装置2,并且按照用于在停泊车辆V3后方的位置等待的行驶轨迹TR3进行自动驾驶。而且,由远程操作员指示的起步基准车辆通过停泊车辆V3的泊车区域之后,车辆10按照向车道L4侧跨越车道以回避停泊车辆V3的行驶轨迹TR4进行自动驾驶。
1-6-4.第4应用例
图12是表示远程辅助系统的第4应用例的图。图12中描绘有车道L5、与车道L5相邻的同方向的车道L6、在车道L5上行驶的车辆10、和在车道L6上行驶的车辆V4。车辆10预定向车道L6变道。在第4应用例中,预定区域为车辆10的区域,预定等待位置SP为车道L5。自动驾驶控制装置40在车道L5上将远程辅助请求REQ发送给远程辅助装置2,并且按照用于继续在车道L5上行驶的行驶轨迹TR3进行自动驾驶。而且,在由远程操作员指示的起步基准车辆为车辆V4的情况下,车辆V4赶超车辆10之后,车辆10按照向车道L6侧进行变道的行驶轨迹TR4进行自动驾驶。
1-7.变形例
实施方式1的远程辅助系统100也可以采用如下这样变形得到的技术方案。此外,以下的变形例也能够应用于后述的实施方式2的远程辅助系统。
自动驾驶控制装置40的功能配置不限。即,自动驾驶控制装置40的功能的一部分或者全部既可以搭载于车辆10,也可以配置于远程辅助装置2的远程服务器4。该变形例也能够应用于后述的实施方式2的远程辅助系统。
步骤S106中的远程辅助需要与否的判定方法不限。即,远程辅助判定部422不限于基于图8所示的例程的方法,也可以使用公知的其他方法判定是否需要远程辅助。
在显示处理中,显示于显示装置62的显示信息INF1的显示方式不限定于俯瞰图。即,例如显示信息INF1也可以是在拍摄车辆10前方的摄像头图像中配置有车辆10、车辆10的行驶轨迹TR1、和附带有作为识别信息的编号或记号的一个或多个回避对象车辆的信息。另外,附带于回避对象车辆的识别信息不限于编号或记号,也可以由色彩等来识别。
图13是表示显示信息INF1的显示方式的变形例的图。如该图所示,在显示装置62是与输入装置64一体构成的触摸面板显示器的情况下,显示在显示器上的显示信息INF1也可以构成为能够通过触摸操作来选择。在该情况下,例如只要将包围回避对象车辆的矩形区域FA、FB分别设定为可选择的区域,则无需对回避对象车辆附带编号或记号。
在受理处理中,输入装置64不限于如图5那样选择附带于回避对象车辆的编号或记号的构成。即,显示信息INF1也可以与俯瞰图或者摄像头图像一起包含“在A通过后通过,没问题吧?”这样的确认消息。在该情况下,输入装置64构成为能够针对确认消息输入“是”或“否”的回答即可。在远程操作员针对确认消息输入了“否”的回答的情况下,自动驾驶控制装置40构成为生成包含与其他回避对象目标有关的确认消息的显示信息INF1即可。根据这种构成,远程操作员能够通过相对于确认消息的“是”或“否”的回答来指示起步基准车辆。
在显示信息INF1包含摄像头图像的情况下,有时摄像头图像中会包含有位于远处的未检测目标。这种未检测目标构成为在自动驾驶控制装置40的识别部410识别出的时间点对该未检测目标附加识别标记而能够由远程操作员选择即可。
实施方式2.
接着,对实施方式2的远程辅助系统100进行说明。除了自动驾驶控制装置40的功能结构,实施方式2的远程辅助系统100具有与实施方式1的远程辅助系统100共通的构成。省略与实施方式1的远程辅助系统100共通的要素的说明。
2-1.实施方式2的自动驾驶控制装置40的特征
图14、图15和图16是用于说明实施方式2的远程辅助系统的特征的图。图14中描绘有车道L1与车道L2交叉的交叉路口I5、在时间t=t1时在车道L1上行驶的车辆10、在车道L2上从车辆10的左侧朝向交叉路口I5行驶的回避对象车辆V5、和在车道L1的对向车道上朝向交叉路口I5行驶的回避对象车辆V6的样子。车辆10预定在交叉路口I5右转。在该应用例中,预定区域为交叉路口I5,预定等待位置SP是车道L1上的交叉路口I5跟前的位置。车辆10要通过预定区域时,不仅要等待车辆V6通过而且需要等待车辆V5通过。
自动驾驶控制装置40将远程辅助请求REQ发送给远程辅助装置2,并且按照用于在交叉路口跟前等待的行驶轨迹TR3进行自动驾驶。而且,在由远程操作员指示的起步基准车辆是回避对象车辆V5的情况下,车辆10在回避对象车辆V5通过交叉路口I5之后在交叉路口I5右转。
图15中描绘有在从时间t=t1经过几秒后的时间t=t2时在车道L1上行驶的车辆10、在车道L2上从车辆10的左侧朝向交叉路口I5行驶的回避对象车辆V5、和在车道L1的对向车道上朝向交叉路口I5行驶的回避对象车辆V6的样子。在图15所示的例子中,描述了回避对象车辆V6注意到回避对象车辆V5而减速、且回避对象车辆V5在加速的样子。在这种情况下,从作为预定区域的交叉路口I5通过的回避对象车辆V5、V6的通过顺序会交换,因此需要重新指定起步基准车辆。
图16中描绘有在从时间t=t1经过几秒后的时间t=t2时除了车辆10、回避对象车辆V5和回避对象车辆V6之外又新出现了从回避对象车辆V6的后方在车道L1的对向车道上朝向交叉路口I5行驶的回避对象车辆V7的情况下的样子。在这种情况下,在从作为预定区域的交叉路口I5通过的多个回避对象车辆的通过顺序中新加入回避对象车辆V7,因此需要重新指定起步基准车辆。
于是,实施方式2的远程辅助系统还具备判定通过预定区域的回避对象车辆的预测通过顺序的功能。图17是表示实施方式2的自动驾驶控制装置40所具备的功能的一部分的功能块图。实施方式2的自动驾驶控制装置40除了具备实施方式1的自动驾驶控制装置40所具备的功能之外,行驶计划部420还具备目标通过顺序变化判定部425。
目标通过顺序变化判定部425基于从目标跟踪部414发送来的目标ID信息,运算有可能会与车辆10碰撞的回避对象车辆通过预定区域的预测通过顺序。而且,在目标通过顺序变化判定部425判定为上次运算出的预测通过顺序与本次运算出的预测通过顺序有变化的情况下,行驶计划部420将从目标跟踪部414发送的起步基准信息INF2废弃,并且再次向远程辅助装置2发送基于新的预测通过顺序的显示信息INF1和远程辅助请求REQ。
根据这种处理,能够在通过预定区域的多个回避对象车辆的预测通过顺序发生了变化的情况下,获得重新指定通过基准车辆的机会。由此,即使在多个回避对象车辆的状况发生了意想不到的变化的情况下,也能够获得指定与状况相应的妥当的通过基准车辆的机会。
2-2.实施方式2的自动驾驶控制装置所执行的具体处理
图18是在实施方式2的自动驾驶控制装置中执行的处理的流程图。与图7所示的例程同样地,图18所示的例程在车辆10的自动驾驶期间通过由自动驾驶控制装置40的处理器42执行存储于存储装置44的程序440来执行。
在图18所示的例程的步骤S200、S202、S204、S206、S210、S212、S214和S216中,执行与图7所示的例程的步骤S100、S102、S104、S106、S110、S112、S114和S116同样的处理。
当在步骤S214的判定中接收到起步基准信息INF2的情况下,处理进入步骤S218。在步骤S218中,在目标通过顺序变化判定部425中运算通过预定区域的回避对象目标的预测通过顺序。而且,判定运算出的预测通过顺序是否从在上一次的步骤S218的处理中运算出的预测通过顺序发生了变化。其结果,在没有认定判定成立的情况下,处理进入步骤S220。另一方面,当在S218的处理中认定判定成立的情况下,将在步骤S214中接收到的起步基准信息INF2废弃后,处理再次回到步骤S204。
在步骤S220中,基于目标ID信息,判定起步基准车辆是否通过了预定区域。其结果,在起步基准车辆尚未通过预定区域的情况下,处理进入步骤S222,在起步基准车辆通过了预定区域的情况下,处理进入步骤S224。
在步骤S222中,车辆10按基于在预定等待位置SP停止而等待的行驶计划的行驶轨迹TR3来自动驾驶。执行步骤S222的处理后,处理再次回到步骤S218。
在步骤S224中,在第二行驶计划生成部424中运算用于实现行驶轨迹TR4的车辆控制量。将运算出的车辆控制量发送到行驶装置60。行驶装置60根据车辆控制量进行车辆10的自动驾驶。由此,车辆10通过预定区域。
如此,根据实施方式2的远程辅助系统100,在多个回避对象车辆通过预定区域的预测通过顺序发生了变化的情况下,再次判定是否需要远程辅助。由此,不会继续进行基于在预测通过顺序变化前所指示的起步基准车辆的判定处理,因此能够防止进行不符合状况的远程辅助。