移载装置、控制装置、移载方法及存储介质
文献发布时间:2023-06-19 19:33:46
技术领域
本发明涉及移载装置、控制装置、移载方法及存储介质。
背景技术
存在将物品移载的移载装置。对于移载装置,要求作业的效率的提高。
发明内容
本发明的目的是提供一种能够更高效率地使物品移动的移载装置、控制装置、移载方法及存储介质。
根据本发明的技术方案,移载装置具有吸附手、移动装置、第1检测器及控制部。上述吸附手具有第1吸附单元及第2吸附单元。上述第1吸附单元包括多个第1吸附部,在第1方向上与物品接触。上述第2吸附单元包括多个第2吸附部,在与上述第1方向相交的第2方向上与上述物品接触。上述第1吸附单元及上述第2吸附单元在与平行于上述第1方向及上述第2方向的面相交的第3方向上设置有多个。上述移动装置使上述吸附手移动。上述第1检测器检测上述物品的与上述第1方向相交的第1面和与上述第2方向相交的第2面。上述控制部基于来自上述第1检测器的第1检测结果,对上述吸附手及上述移动装置进行控制。上述控制部执行:第1动作,在使用上述第1检测结果计算出的多个上述物品的载置状态满足第1条件的情况下,通过多个上述第1吸附单元将上述多个物品的上述第1面分别吸附,通过多个上述第2吸附单元将上述多个物品的上述第2面分别吸附,使上述多个物品移动;以及第2动作,在上述载置状态满足第2条件的情况下,通过上述多个第1吸附单元的1个将上述多个物品中的1个物品的上述第1面吸附,不使上述多个第2吸附单元进行吸附,使上述多个物品中的上述1个物品移动。
根据技术方案,能够提供能够更高效率地使物品移动的移载装置、控制装置、移载方法及存储介质。
附图说明
图1是示意地表示有关实施方式的移载装置的立体图。
图2是表示有关实施方式的吸附手的立体图。
图3是表示有关实施方式的吸附手的一部分的剖面图。
图4是示意地表示有关实施方式的吸附手的侧视图。
图5的(a)及图5的(b)是示意地表示有关实施方式的吸附手的动作的侧视图。
图6是表示有关实施方式的吸附手的立体图。
图7的(a)是示意地表示第1动作中的保持方法的正视图。图7的(b)是示意地表示第1动作中的保持方法的侧视图。
图8的(a)~图8的(c)是示意地表示在第1动作中保持物品时的状况的侧视图。
图9的(a)是示意地表示第2动作中的保持方法的正视图。图9的(b)是示意地表示第2动作中的保持方法的侧视图。
图10是表示有关实施方式的移载装置的移载方法的概要的流程图。
图11是表示第1判定中的处理的流程图。
图12是用来说明第1判定中的处理的示意图。
图13是表示第1动作的一部分的流程图。
图14是表示第1动作的另一部分的流程图。
图15的(a)~图15的(c)是表示第1动作的示意图。
图16的(a)~图16的(c)是表示第1动作的示意图。
图17的(a)~图17的(c)是表示第1动作的示意图。
图18是表示第2判定中的处理的流程图。
图19是用来说明第2判定中的处理的示意图。
图20是表示第2动作的一部分的流程图。
图21是表示第2动作的另一部分的流程图。
图22的(a)及图22的(b)是表示第2动作的示意图。
图23的(a)~图23的(c)是表示第2动作的示意图。
图24的(a)~图24的(c)是表示第2动作的示意图。
图25是示意地表示有关实施方式的其他吸附手的正视图。
图26的(a)是示意地表示第3动作中的保持方法的正视图。图26的(b)是示意地表示第3动作中的保持方法的侧视图。
图27是表示有关实施方式的变形例的移载装置的移载方法的概要的流程图。
图28是表示第3判定中的处理的流程图。
图29是用来说明第3判定中的处理的示意图。
图30是表示硬件结构的示意图。
具体实施方式
以下,一边参照附图一边对本发明的各实施方式进行说明。
附图是示意性或概念性的,各部分的厚度与宽度的关系、部分间的大小的比例等并不一定与现实相同。即使在表示相同的部分的情况下,也有依据附图而将彼此的尺寸或比例不同地表示的情况。
在本申请的说明书和各图中,对于与已经说明的要素相同的要素赋予相同的标号,适当省略详细的说明。
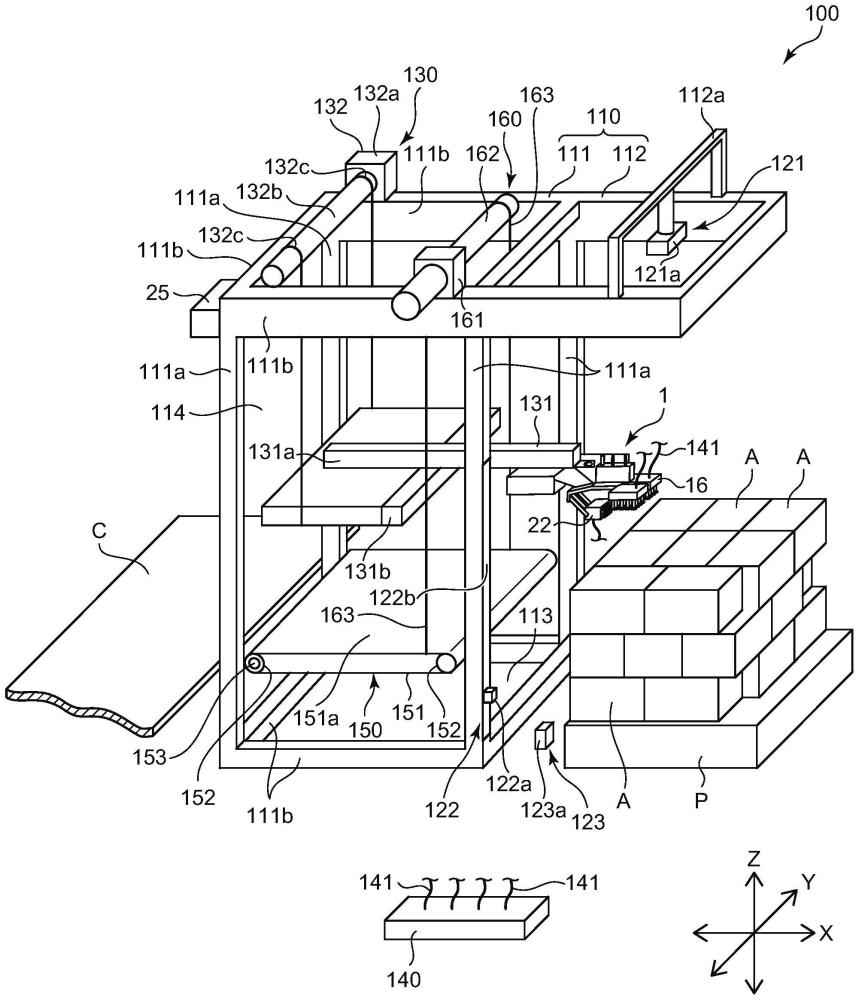
图1是示意地表示有关实施方式的移载装置的立体图。
有关实施方式的移载装置100设置在仓库等进行物品的移载作业的现场。在移载作业中,使所积载的物品依次向输送装置或其他位置移动。移载装置100如图1所示,具有吸附手1、控制部25、支承框架110、第1检测器121、第2检测器122、第3检测器123、移动装置130及负压产生装置140。
吸附手1能够将物品的上表面(第1面)及侧面(第2面)真空吸附。吸附手1能够通过物品的上表面及侧面中的至少任一个的吸附,将物品保持(稳定地把持)。
具体而言,吸附手1包括上表面吸附单元16及侧面吸附单元22。这里,设在吸附手1保持物品时上表面吸附单元16与物品A接触的方向为Z方向(上下方向或第1方向)。设侧面吸附单元22与物品A接触的方向为X方向(前后方向或第2方向)。X方向与Z方向相交。设与X-Z面相交的方向为Y方向(左右方向或第3方向)。例如,X方向及Y方向与水平面平行,Z方向与铅直方向平行。X方向、Y方向及Z方向相互正交。
支承框架110支承移载装置100的各构成要素。第1检测器121检测物品A的上表面及侧面。第2检测器122检测物品A的高度等。侧面具体而言,是物品A具有的多个面中的与X方向相交并且与输送机150对置的面。第3检测器123检测由吸附手1保持的物品A的底面的位置。移动装置130使吸附手1移动。负压产生装置140使吸附手1产生用于吸附的负压。
移载装置100也可以还具有用于装卸作业的输送机150及升降装置160。即,移载装置100也可以作为装卸装置使用。例如,装卸作业包括卸货及装货。作为一例,与移载装置100相邻而设置输送物品A的输送机C(输送装置)。此外,与移载装置100相邻而载置积载有物品A的托盘P。移载装置100位于输送机C与托盘P之间。移载装置100保持积载在托盘P之上的物品A,向支承框架110内的输送机150移载。输送机150将所移载的物品A进一步朝向输送机C输送。升降装置160使输送机150上升或下降。
以下,对于各构成要素详细叙述具体的一例。
支承框架110构成移载装置100的外轮廓,固定在地面。支承框架110包括主体部111及突出部112。主体部111的形状是长方体状。输送机150设置在主体部111的内侧。主体部111具有面向托盘P侧的开口113和面向输送机C侧的开口114。物品A经由开口113从托盘P移载到输送机150。此外,物品A经由开口114从输送机150移载到输送机C。
主体部111例如由4个铅直框架111a和将这4个铅直框架111a的上端及下端彼此分别连结的多个水平框架111b构成。突出部112安装在主体部111上部的前方,朝向前方突出。突出部112位于托盘P的上方。
第1检测器121从Z方向检测物品的上表面及侧面。第1检测器121包括摄像部121a。摄像部121a固定在设置于突出部112的支承部112a。摄像部121a包括从图像传感器及测距传感器中选择的1个或两个。摄像部121a将载置在托盘P的物品A从上方摄像。摄像部121a将所取得的图像(静止图像)向控制部25发送。摄像部121a也可以取得动态图像。在此情况下,从动态图像中切割出静止图像。
控制部25根据由摄像部121a取得的图像,计算关于物品的数据。计算出的数据包括影印在图像中的物品A的上表面的识别结果、X方向、Y方向及Z方向的各个方向上的上表面的位置、上表面的X方向上的长度、上表面的Y方向上的长度、上表面的面积等。在移载装置100中,摄像部121a及控制部25作为检测物品A的上表面的第1检测器121发挥功能。也可以将分别于控制部25的图像识别系统嵌入到摄像部121a,作为第1检测器121使用。
第2检测器122在与Z方向相交的方向上检测物品的侧面。第2检测器122包括测距传感器122a。测距传感器122a在与Z方向相交的方向上测量与物品的距离。在图示的例子中,测距传感器122a设置在多个铅直框架111a的1个,从与Z方向垂直并且相对于X方向及Y方向倾斜的方向测量与物品的距离。测距传感器122a朝向物品发出红外线、激光或超声波。从距离的测量精度的观点来看,测距传感器122a优选的是使用激光的激光测距仪(LRF)。
控制部25基于由测距传感器122a得到的测量结果,识别物品A的侧面或计算物品A的侧面的X-Y面中的位置等。测距传感器122a及控制部25作为第2检测器122发挥功能。
例如,第2检测器122安装在升降装置122b。升降装置122b使第2检测器122沿着Z方向上升或下降。在此情况下,控制部25可以根据由测距传感器122a得到的测量结果及由升降装置122b得到的移动量,计算物品A的底面的Z方向上的位置、物品A的上表面的Z方向上的位置、物品A的高度(Z方向上的长度)等。
第2检测器122与第1检测器121同样地,也可以包括摄像部。摄像部将载置在托盘P的物品A从侧方拍摄。摄像部将所取得的图像向控制部25发送。控制部25根据图像测量物品A的侧面的识别结果、物品A的侧面的X-Y面上的位置、物品A的底面的Z方向上的位置、物品A的上表面的Z方向上的位置、物品A的高度等。即,摄像部及控制部25作为第2检测器122发挥功能。
第3检测器123例如包括设置在主体部111与托盘P之间的测距传感器123a。测距传感器123a检测经过上方的物品A的底面的Z方向上的位置。测距传感器123a将测量结果向控制部25发送。控制部25根据测距传感器123a的测量结果,计算物品A的底面的Z方向上的位置。测距传感器123a及控制部25作为第3检测器123发挥功能。测距传感器123a优选是使用激光的LRF。
第3检测器123与第1检测器121同样地,可以包括摄像部。摄像部设置在主体部111与托盘P之间,将经过上方的物品A从下方拍摄。摄像部将所取得的图像向控制部25发送。控制部25根据图像计算物品A的底面的Z方向上的位置。即,摄像部及控制部25作为第3检测器123发挥功能。
移动装置130包括水平移动装置131及升降装置132。水平移动装置131使吸附手1沿着X-Y面移动。升降装置132使水平移动装置131上升或下降。由此,与水平移动装置131连结的吸附手1沿着Z方向移动。
水平移动装置131包括臂131a及支承部131b。臂131a与吸附手1的臂10连结,能够沿着X方向伸缩。通过臂131a的动作,能够使吸附手1沿着X方向移动。支承部131b沿着Y方向延伸,从下方将臂131a可移动地支承。支承部131b使臂131a沿着Y方向移动。通过支承部131b的动作,能够使吸附手1沿着Y方向移动。臂131a及支承部131b通过电动机或气缸等致动器分别动作。
升降装置132包括驱动部132a、轴杆132b及线132c。驱动部132a安装在主体部111的上端。轴杆132b沿着Y方向延伸,与驱动部132a连结。线132c卷绕在轴杆132b。线132c的一端与水平移动装置131连结。驱动部132a使轴杆132b旋转。线132c对应于轴杆132b的旋转而卷绕或展开,由此水平移动装置131沿着Z方向移动。
负压产生装置140能够单独地调整各个上表面吸附单元16的压力及各个侧面吸附单元22的压力。负压产生装置140包括与多个上表面吸附单元16及多个侧面吸附单元22分别连接的多个管141。除此以外,负压产生装置140还包括未图示的真空泵、喷射器、阀等。
输送机150包括带151、带轮152及电动机153。带151是在相互分离于X方向上的一对带轮152挂设的无端带。带151的一端与输送机C相邻。带轮152的旋转轴与Y方向平行。电动机153通过使一对带轮152的任一个旋转,而驱动带151。通过带151的驱动,将载置在输送机150的物品A朝向输送机C输送。
升降装置160包括驱动部161、轴杆162及线163。驱动部161安装在主体部111的上端。轴杆162沿着Y方向延伸,与驱动部161连结。线163卷绕在轴杆162。线163的一端与输送机150连结。驱动部161使轴杆162旋转。线163对应于轴杆162的旋转而卷绕或展开,由此输送机150沿着Z方向移动。
控制部25控制上述各构成要素的动作。例如,控制部25与吸附手1、摄像部121a、测距传感器122a、测距传感器123a、移动装置130、负压产生装置140、输送机150及升降装置160电连接。控制部25基于由第1检测器121得到的检测结果(第1检测结果)、由第2检测器122得到的检测结果(第2检测结果)及由第3检测器123得到的检测结果,对吸附手1、移动装置130、负压产生装置140、输送机150、升降装置160等进行控制。
图2是表示有关实施方式的吸附手的立体图。图3是表示有关实施方式的吸附手的一部分的剖面图。图4是示意地表示有关实施方式的吸附手的侧视图。
参照图2~图4,对于有关实施方式的吸附手1说明具体的一例。吸附手1如图2~图4所示,包括臂10、基座11、倾斜机构12、直线导引部13、连结框架14、固定机构15、上表面吸附单元16(第1吸附单元)、直线导引部17、连结板18、缸19、连杆机构20、驱动机构21、侧面吸附单元22(第2吸附单元)及检测器23。
如图2所示,臂10沿着X方向延伸,支承吸附手1的各构成要素。臂10与X-Y正交机器人等外部的装置连接。臂10也可以是外部的装置的一部分。
基座11是沿着X-Z面展开的板状的部件。基座11下部的后端经由旋转轴10b与臂10的前端10a连结,能够相对于前端10a旋转。
倾斜机构12设置在臂10与基座11之间。具体而言,倾斜机构12包括缸12a、旋转轴12b及旋转轴12c。臂10具有朝向下方弯曲的弯曲部10c。缸12a的一端经由旋转轴12b与弯曲部10c连结,能够相对于弯曲部10c旋转。缸12a的另一端经由旋转轴12c与基座11上部的后端连结,能够相对于该后端旋转。旋转轴10b、12b及12c的旋转中心与Y方向平行。
缸12a能够沿着X方向伸缩。缸12a、旋转轴12b及旋转轴12c的Z方向上的位置与旋转轴10b的Z方向上的位置不同。由此,当缸12a的长度变化时,基座11的绕Y方向的角度变化。在吸附手1,缸12a、旋转轴12b及旋转轴12c位于旋转轴10b的上方。例如,基座11的前端通过缸12a伸长而朝向下方倾斜。
直线导引部13设置在基座11的侧面上。在吸附手1,两个直线导引部13设置在基座11的一个侧面。直线导引部13包括轨道及块。轨道相对于基座11固定,沿着Z方向设置。块能够沿着轨道在Z方向上移动。
连结框架14包括沿着X-Z面扩展的纵框架部14a和沿着X-Y面扩展的横框架部14b。横框架部14b的Y方向的一端与纵框架部14a的下端相连。纵框架部14a相对于直线导引部13的块固定。由此,连结框架14相对于基座11在Z方向上可动。
固定机构15接近于纵框架部14a,设置在基座11的侧面。固定机构15能够切换连结框架14固定的锁定状态和连结框架14可动的解锁状态。图3表示经过固定机构15的X-Z截面。如图3所示,固定机构15包括杆15a、固定板15b、可动板15c、夹钳15d及缸15e。
杆15a相对于基座11固定,沿着Z方向延伸。固定板15b是沿着X-Y面展开的板状的部件,相对于连结框架14固定。可动板15c是沿着X-Y面展开的板状的部件,经由夹钳15d及缸15e安装在固定板15b。在解锁状态下,固定板15b、可动板15c、夹钳15d及缸15e能够相对于杆15a滑动。如果连结框架14沿着Z方向移动,则固定板15b、可动板15c、夹钳15d及缸15e也沿着Z方向移动。
缸15e能够沿着Z方向伸缩。如果缸15e伸长或收缩,则可动板15c相对于固定板15b在Z方向上移动。如果由于缸15e的动作而固定板15b与可动板15c之间的距离变长,则夹钳15d的零件被朝向杆15a推压。由此,固定板15b、可动板15c、夹钳15d及缸15e的Z方向上的位置固定。其结果,连结框架14的Z方向上的位置固定。如果固定板15b与可动板15c之间的距离变短,则夹钳15d的零件对于杆15a的推压解除。由此,固定板15b、可动板15c、夹钳15d及缸15e能够移动。结果,连结框架14能够在Z方向上移动。
如图2所示,上表面吸附单元16相对于连结框架14的横框架部14b固定。上表面吸附单元16包括框体16a及多个吸附部16b(第1吸附部)。各吸附部16b包括杆16c(第1杆)和吸附垫板16d(第1吸附垫板)。杆16c沿着Z方向延伸。例如,杆16c相对于框体16a固定。杆16c可以能够相对于框体16a在Z方向上滑动。在此情况下,在上表面吸附单元16还设置有用来将杆16c固定的夹钳。吸附垫板16d具有挠性,设置在杆16c的前端。在杆16c的内部及吸附垫板16d的内部设置有空间,这些空间相互连通。
多个吸附部16b沿着相互相交的两方向排列。吸附垫板16d的吸附面与多个吸附部16b的排列方向平行。在吸附手1,多个吸附部16b沿着X方向及Y方向排列。吸附部16b的数量、各吸附部16b的尺寸、吸附部16b彼此的间隔等对应于保持的物品而适当设计。
在框体16a的内部,设置有用来将未图示的排气系统与多个吸附部16b连接的配管等。通过排气系统的动作,对于1个上表面吸附单元16将各吸附垫板16d的内部一齐减压。
直线导引部17沿着框体16a的上表面设置。在吸附手1,1个直线导引部17设置在框体16a的上表面,另一直线导引部17设置在横框架部14b的上表面。各直线导引部17包括轨道及块。轨道相对于横框架部14b及框体16a固定,沿着X方向延伸。块能够沿着轨道在X方向上移动。
连结板18是沿着X方向延伸的板状的部件。连结板18的前方部与X-Y面平行,相对于各直线导引部17的块固定。由此,连结板18相对于上表面吸附单元16在X方向上可动。连结板18的后方部稍稍朝向下方倾斜。
缸19使侧面吸附单元22相对于上表面吸附单元16在X方向上移动。具体而言,如图2及图4所示,缸19的管主体相对于框体16a固定。缸19的活塞相对于连结板18固定。缸19能够沿着X方向伸缩。如果缸19伸长或收缩,则连结板18相对于上表面吸附单元16在X方向上移动。由此,与连结板18连结的侧面吸附单元22沿着X方向移动。
连杆机构20连结在连结板18与侧面吸附单元22之间。如图4所示,连杆机构20包括一对连杆20a及20b。连杆20a及20b相互平行地延伸,能够同步旋转。连杆20a的一端及20b的一端分别经由旋转轴20c及20d与连结板18的后端连结。旋转轴20c及20d能够相对于连结板18旋转。另一方面,连杆20a及20b分别相对于旋转轴20c及20d固定。因此,如果旋转轴20c及20d相对于连结板18旋转,则连杆20a及20b也旋转。
驱动机构21与连结板18及连杆机构20连结,使侧面吸附单元22的Z方向上的位置变化。具体而言,驱动机构21包括缸21a、旋转轴21b、旋转轴21c及条状物21d。缸21a沿着连结板18的后方部设置。缸21a的管主体经由旋转轴21b与连结板18连结,能够相对于连结板18旋转。缸21a的活塞经由旋转轴21c与条状物21d的一端连结,能够相对于条状物21d旋转。条状物21d的另一端相对于旋转轴20c及20d的一个固定。在吸附手1,条状物21d相对于旋转轴20c固定。侧面吸附单元22分别经由旋转轴20e及20f与连杆20a的另一端及20b的另一端连结,能够相对于连杆20a及20b旋转。
图5的(a)及图5的(b)是示意地表示有关实施方式的吸附手的动作的侧视图。在图5的(a)中,将缸21a、旋转轴21b及旋转轴21c用虚线表示。在图5的(b)中,将缸21a及旋转轴21b省略,将旋转轴21c用虚线表示。
旋转轴20c~20f、21b及21c与Y方向平行。如图5的(a)及图5的(b)所示,如果缸21a伸长或收缩,则条状物21d以旋转轴20c为中心绕Y方向旋转。由于条状物21d相对于旋转轴20c固定,所以旋转轴20c对应于条状物21d的旋转而旋转。与旋转轴20c固定的连杆20a以旋转轴20c为中心绕Y方向旋转。连杆20b也与连杆20a同步而绕Y方向旋转。由此,侧面吸附单元22以旋转轴20c为中心绕Y方向旋转。通过驱动机构21的动作,能够使侧面吸附单元22的X-Z面中的位置变化。例如,根据由吸附手1保持的物品的排列来切换侧面吸附单元22的位置。
侧面吸附单元22包括框体22a及多个吸附部22b(第2吸附部)。各吸附部22b包括杆22c(第2杆)和吸附垫板22d(第2吸附垫板)。杆22c沿着X方向延伸。例如,杆22c相对于框体22a固定。杆22c也可以能够相对于框体22a在X方向上滑动。在此情况下,在侧面吸附单元22还设置有用来将杆22c固定的夹钳。吸附垫板22d具有挠性,设置在杆22c的前端。在杆22c的内部及吸附垫板22d的内部设置有空间,这些空间相互连通。
多个吸附部22b沿着相互相交的两方向排列。吸附垫板22d的吸附面与多个吸附部22b的排列方向平行。在吸附手1,多个吸附部22b沿着Y方向及Z方向排列。吸附部22b的数量、各吸附部22b的尺寸、吸附部22b彼此的间隔等根据保持的物品而适当设计。
在框体22a的内部,设置有用来将未图示的排气系统与多个吸附部22b连接的配管等。通过排气系统的动作,对于1个侧面吸附单元22将各吸附垫板22d的内部一齐减压。独立地执行对于侧面吸附单元22的压力控制与对于上表面吸附单元16的压力控制。
检测器23相对于基座11固定。检测器23检测连结框架14相对于基座11的上升。基于来自检测器23的检测信号,能够判断上表面吸附单元16是否与物品接触。例如,检测器23包括从光传感器、接近传感器、测距传感器及透射传感器中选择的1个以上。检测器23可以设置在图示的场所以外。例如,检测器23也可以设置在上表面吸附单元16,更直接地检测物品相对于上表面吸附单元16的接近。
控制部25对吸附手1的各构成要素进行控制。例如,控制部25使缸12a、15e、19及21a动作。此外,控制部25控制用来对上表面吸附单元16及侧面吸附单元22分别进行排气的排气系统。
缸12a、15e、19及21a是气缸(致动器的一例)。可以代替缸12a、15e、19及21a而设置其他的致动器。例如,也可以设置电动机和将电动机的旋转运动变换为直线运动的机械要素。
进而,控制部25切换侧面吸附单元22处于第1位置的第1状态和侧面吸附单元22处于第2位置的第2状态。图5的(a)表示侧面吸附单元22处于第1位置时的状况。侧面吸附单元22在第1位置能够保持物品的侧面。当侧面吸附单元22处于第1位置时,侧面吸附单元22比上表面吸附单元16的至少一部分靠下方配置。例如,吸附部22b比上表面吸附单元16的框体16a及杆16c的上端靠下方配置。图5的(b)表示侧面吸附单元22处于第2位置时的状况。第2位置处于比第1位置靠上方。当侧面吸附单元22处于第2位置时,侧面吸附单元22比上表面吸附单元16的至少一部分靠上方配置。例如,吸附部22b比上表面吸附单元16的吸附部16b靠上方配置。
图6是表示有关实施方式的吸附手的立体图。
图6表示从与图2不同的朝向观察吸附手1时的状况。在图6中观察吸附手1的朝向相对于经过吸附手1的Y方向上的中心的X-Z面与在图2中观察吸附手1的朝向大致对称。如图2及图6所示,在基座11的两侧面分别设置有包括直线导引部13、连结框架14、固定机构15、上表面吸附单元16、直线导引部17、连结板18、缸19、连杆机构20、驱动机构21及侧面吸附单元22的吸附机构5。因此,例如在Y方向上设置有多个上表面吸附单元16及多个侧面吸附单元22。
各吸附机构5能够相互独立地移动。此外,针对每个吸附机构5设置图4及图5所示的缸19及21a。缸19及21a能够针对每个吸附机构5独立地动作。因此,各上表面吸附单元16的Z方向上的位置可能相互不同。各侧面吸附单元22的X-Z面上的位置可能相互不同。
移载装置100能够执行第1动作及第2动作。在第1动作及第2动作中,保持的物品的数量、保持的方法及移载方法相互不同。
图7的(a)是示意地表示第1动作中的保持方法的正视图。图7的(b)是示意地表示第1动作中的保持方法的侧视图。
如图7的(a)及图7的(b)所示,在第1动作中,通过吸附手1保持多个物品A。多个物品A分别由多个吸附机构5吸附。具体而言,1个物品A的上表面及侧面分别由1个吸附机构5的上表面吸附单元16及侧面吸附单元22吸附。不同的物品A的上表面及侧面分别由不同的吸附机构5的上表面吸附单元16及侧面吸附单元22吸附。移载装置100一边使所保持的多个物品A在其他物品A的上表面或托盘P的上表面滑动,一边使所保持的多个物品A移动。另外,移载装置100可以在吸附物品A的上表面及侧面的状态下使物品A上升。
图8的(a)~图8的(c)是示意地表示在第1动作中保持物品时的状况的侧视图。
在将物品吸附时,如图8的(a)所示,上表面吸附单元16与物品A的上表面接触,将上表面吸附。接着,通过缸19的动作,如图8的(b)所示,使侧面吸附单元22与物品A的侧面接触。侧面吸附单元22将侧面吸附。通过物品A的上表面及侧面的吸附,吸附手1保持物品A。
接着,吸附手1上升。此时,如果缸12a开放或缸12a的推力较弱,则由于吸附机构5及物品A的重量,缸12a伸长。由此,如图8的(c)所示,在保持着物品A的状态下,上表面吸附单元16及侧面吸附单元22相对于X-Y面倾斜。如果倾斜过大,则有可能物品A的内容物损坏。因此,相对于X-Y面的倾斜角度优选的是比0度大且小于15度。
例如,在物品A的上表面,可能附着用来粘贴标签的粘接剂或包装用的带的粘接剂等。有时在所保持的物品A的底面由粘接剂粘连着其他物品A的上表面。通过使其倾斜,能够容易地使所保持的物品A从其他物品A剥离。由此,在输送物品A时,能够减小所输送的物品A与其他物品A之间的摩擦。
图9的(a)是示意地表示第2动作中的保持方法的正视图。图9的(b)是示意地表示第2动作中的保持方法的侧视图。
如图9的(a)及图9的(b)所示,在第2动作中,通过吸附手1保持1个物品A。1个物品A的上表面由上表面吸附单元16吸附。侧面吸附单元22设置在第2位置,不吸附物品A的侧面。移载装置100在使所保持的1个物品A上升后,使其沿着X-Y面移动。
根据第1动作,由于能够将多个物品A移动,所以能够提高作业效率。此外,根据第1动作,由于能够将物品A的上表面及侧面吸附,所以能够将物品A更稳定地移动。进而,在第1动作中使物品A滑动的情况下,由于不需要使物品A大幅上升,所以能够缩短物品的移动时间。根据第2动作,由于使物品A上升,所以不论所保持的物品A与输送机150之间的状态如何都能够将物品A移动。
图10是表示有关实施方式的移载装置的移载方法的概要的流程图。
在移载方法M1中,首先,第1检测器121检测载置于托盘P的物品A的上表面(步骤S0)。控制部25判定基于第1检测器121的检测结果计算的载置状态是否满足第1条件(步骤S1:第1判定)。载置状态表示载置在托盘P之上的多个物品的状态,包括各物品的上表面的识别结果、上表面的位置、上表面的尺寸等数据。为了得到更正确的载置状态,载置状态也可以基于第1检测器121及第2检测器122各自的检测结果来计算。在此情况下,载置状态还包括各物品的侧面的识别结果、侧面的位置、物品的高度等数据。
在满足第1条件的情况下,控制部25执行第1动作(步骤S1a)。在不满足第1条件的情况下,控制部25判定载置状态是否满足第2条件(步骤S2:第2判定)。在满足第2条件的情况下,控制部25执行第2动作(步骤S2a)。在不满足第2条件的情况下,移载装置100判断为没有能够移载的物品A。移载装置100结束移载动作。
在第1动作或第2动作后,控制部25判断是否存在剩余在托盘P之上的物品A(步骤S5)。在存在剩余的物品A的情况下,再次执行步骤S0。在不存在剩余的物品A的情况下,移载装置100结束移载动作。
以下,对于移载方法M1中的第1判定、第1动作、第2判定及第2动作说明详细情况。
(第1判定)
图11是表示第1判定中的处理的流程图。
首先,控制部25判断是否取得了多个物品的上表面及侧面的数据(步骤S100)。具体而言,控制部25判断是否由第1检测器121检测到多个物品的上表面的位置和多个物品的侧面的位置。该判断还可以进一步基于由第2检测器122得到的检测结果来执行。
在取得了多个物品的上表面及侧面的数据的情况下,控制部25判断是否存在两个以上的物品的排列方向与吸附单元的排列方向相同的物品的组(步骤S101)。在移载装置100,多个上表面吸附单元16及多个侧面吸附单元22在Y方向上排列。因此,控制部25判断是否存在在Y方向上排列的物品的组。
在存在在Y方向上排列的物品的组的情况下,控制部25判断是否存在上表面的尺寸差小于第1阈值的物品的组(步骤S102)。例如,控制部25对物品彼此的X方向上的长度的差与第1阈值进行比较。控制部25也可以对物品彼此的Y方向上的长度的差与第1阈值进行比较。控制部25也可以对物品彼此的上表面的面积的差与第1阈值进行比较。控制部25也可以在物品彼此之间对从X方向上的长度、Y方向上的长度及面积中选择的两个以上进行比较。在此情况下,可以对于X方向上的长度、Y方向上的长度及面积分别设定不同的第1阈值。作为第1阈值,设定在第1动作中能够将多个物品稳定地滑动的值。
在存在上表面的尺寸差小于第1阈值的物品的组的情况下,控制部25计算一个物品的上表面的Z方向上的位置与另一个物品的上表面的Z方向上的位置之间的距离。控制部25判断该距离是否小于第2阈值(步骤S103)。第2阈值基于吸附机构5的Z方向上的可动范围、吸附垫板16d的Z方向上的可变量等来设定。在步骤S103中,判断多个物品的上表面的位置的差是否充分小到能够将这些物品同时保持的程度。
在上表面彼此之间的距离小于第2阈值的情况下,控制部25判断物品彼此的高度的差是否小于第3阈值(步骤S104)。作为第3阈值,设定在第1动作中能够将多个物品稳定地滑动的值。
在高度的差小于第3阈值的情况下,控制部25判断物品的侧面彼此之间的X方向上的距离是否小于第4阈值(步骤S105)。第4阈值基于侧面吸附单元22相对于上表面吸附单元16的X方向上的可动范围、吸附垫板22d的X方向上的可变量等设定。即,在步骤S105中,判断多个物品的侧面(前表面)的位置的差是否充分小到能够将这些物品同时保持的程度。
在侧面彼此之间的距离小于第4阈值的情况下,控制部25判断多个物品的移动路径中的阶梯差是否小于第5阈值(步骤S106)。例如,在第1动作中,将所保持的物品滑过处于所保持的物品与输送机150之间的物品的上表面。即,移动路径是该其他物品的上表面。阶梯差换言之是该其他物品的上表面彼此之间的Z方向上的距离。如果阶梯差大,则在使物品滑动时,所保持的物品卡挂而阻碍滑动。作为第5阈值,设定能够将多个物品稳定地滑动的值。另外,移动路径也可以是托盘P的上表面。由于托盘P的上表面实质上是平坦的,所以判断为阶梯差小于第5阈值。
如果在步骤S100~S106的任一个中都判断为不满足条件,则控制部25判断为物品的载置状态不满足第1条件。第1判定结束。
在阶梯差小于第5阈值的情况下,控制部25判断是否存在多个满足步骤S100~S106的条件的物品的组(步骤S107)。在存在多个组的情况下,控制部25从多个组中选择包含上表面处于最高的位置的物品的组(步骤S108)。控制部25判断是否存在多个在步骤S108中选择出的组(步骤S109)。在存在多个组的情况下,控制部25从多个组中选择包含侧面处于最靠跟前的物品的组(步骤S110)。最靠跟前,是指测距传感器122a与物品之间的X-Z面上的距离最短。在步骤S107或S109中,在不存在多个组的情况下,选择1个组作为同时保持的对象。另外,在步骤S110中存在多个选择出的组的情况下,从选择出的多个组中选择任意的1个组。例如,从多个组中选择包含距测距传感器122a最近的物品的组。移载装置100通过第1动作使包含在选择出的组中的多个物品同时移动。
如上述那样,用于第1动作的第1条件包括能够检测多个物品A各自的上表面及侧面、多个物品A在Y方向上排列、能够将多个物品A的上表面通过多个上表面吸附单元16同时吸附、能够将多个物品A的侧面通过多个侧面吸附单元22同时吸附、能够将多个物品A沿着X方向同时滑动。通过使用第1条件的第1判定,选择能够稳定地移动的多个物品。
另外,在第1判定中,也可以仅使用上述的条件的一部分。通过将条件放宽,虽然保持或移载的稳定性可能下降,但能够将多个物品同时保持的情形增加,有可能能够提高移载的效率。
在第1判定中使用的条件也可以在上述的条件以外还包括其他条件。例如,由第1检测器121得到的检测结果包含物品的X-Y面中的图形中心。第1条件包括当保持物品时该物品的图形中心位于预先设定的第1范围内。第1范围以保持物品时的上表面吸附单元16的位置为基准而设定。作为一例,将保持物品时的上表面吸附单元16的X-Y面中的外缘设定为第1范围的外缘。在上表面吸附单元16向物品接触时,判断在X-Y面中图形中心是否位于上表面吸附单元16的外缘的内侧。为了提高保持的稳定性,也可以将第1范围的外缘设定为比上表面吸附单元16的外缘小。
图12是用来说明第1判定中的处理的示意图。
作为一例,如图12所示,积载有多个物品A。摄像部121a将物品A从上方拍摄。第2检测器122检测物品A的侧面的位置。多个物品A中,物品A1~A4在上方没有载置其他物品。此外,在配置物品A1及A2的高度(Z方向的位置),在物品A1及A2的跟前没有载置其他物品。在配置物品A3及A4的高度,在物品A3及A4的跟前没有载置其他物品。因此,在步骤S100中,作为能够取得上表面及侧面的双方的数据的物品而提取物品A1~A4。
在步骤S101中,对于提取出的物品A1~A4,判断是否存在在Y方向上排列的物品的组。结果,判断为存在由物品A1及A2构成的组Se1和由物品A3及A4构成的组Se2。
在步骤S102中,判断物品A1的上表面的尺寸与物品A2的上表面的尺寸的差是否小于第1阈值。此外,判断物品A3的上表面的尺寸与物品A4的上表面的尺寸的差是否小于第1阈值。在图12所示的例子中,积载有实质上相同尺寸的多个物品。因此,在步骤S102中判断为任一个差都小于第1阈值。
同样地,在步骤S103中,判断为物品A1的上表面与物品A2的上表面之间的Z方向上的距离小于第2阈值,判断为物品A3的上表面与物品A4的上表面之间的Z方向上的距离小于第2阈值。在步骤S104中,判断为物品A1的高度与物品A2的高度的差小于第3阈值,判断为物品A3的高度与物品A4的高度的差小于第3阈值。在步骤S105中,判断为物品A1的前表面与物品A2的前表面之间的X方向上的距离小于第4阈值,判断为物品A3的前表面与物品A4的前表面之间的X方向上的距离小于第4阈值。
在步骤S106中,将物品A3~A6的上表面判定为组Se1的移动路径。例如,判断为组Se1的移动路径中的阶梯差小于第5阈值。即,判断为物品A3的上表面与物品A5的上表面之间的Z方向上的距离小于第5阈值,判断为物品A4的上表面与物品A6的上表面之间的Z方向上的距离小于第5阈值。在组Se2与输送机150之间不存在其他物品。因此,判断为组Se2的移动路径中的阶梯差小于第5阈值。
在步骤S107中,判断为存在满足步骤S100~S106的条件的多个组。在步骤S108中,比较物品A1~A4各自的上表面的位置。结果,选择包含上表面处于最高的位置的物品A1及A2的组Se1。在步骤S109中,在步骤S108中选择的组是1个。因此,选择组Se1作为由第1动作进行的保持的对象。在通过第1动作使组Se1移动之后,通过接下来的第1判定,将组Se2选择为第1动作的保持的对象。
(第1动作)
图13是表示第1动作的一部分的流程图。图14是表示第1动作的另一部分的流程图。图15的(a)~图15的(c)、图16的(a)~图16的(c)及图17的(a)~图17的(c)是表示第1动作的示意图。
水平移动装置131使吸附手1沿着X-Y面移动(图13的步骤S120)。如图15的(a)至图15的(b)所示,吸附手1位于在第1判定中选择的物品A的上方。此外,输送机150的Z方向上的位置设定为与保持的物品A的底面相同的位置。另外,图15的(a)~图17的(c)由于是侧视图,所以仅图示了1个上表面吸附单元16及1个侧面吸附单元22。在进深方向上,还存在未图示的其他的上表面吸附单元16、其他的侧面吸附单元22及其他的物品A。
将驱动机构21的缸21a开放(步骤S121)。即,不从缸21a向连杆机构20施加力,侧面吸附单元22为能够移动的状态。将固定机构15设定为解锁状态(步骤S122),连结框架14为能够移动的状态。如图15的(c)所示,升降装置132使吸附手1朝向物品A下降(步骤S123)。将吸附手1下降到所选择的物品A的上表面的位置。
上表面吸附单元16开始物品A的上表面的吸附(步骤S124)。具体而言,控制部25使负压产生装置140动作,将吸附部16b的内部排气。控制部25判断上表面吸附单元16是否与物品A接触(步骤S125)。接触基于由检测器23得到的检测信号来判断。如果判断为上表面吸附单元16不与物品A接触,则升降装置132再次使吸附手1下降(步骤S126)。在步骤S126的执行后,再次执行步骤S125。
如果判断为上表面吸附单元16与物品A接触了,则控制部25判断由上表面吸附单元16进行的物品A的吸附是否完成(步骤S127)。吸附是否完成基于上表面吸附单元16的压力来判断。如果判断为吸附没有完成,则继续由上表面吸附单元16进行的吸附。控制部25判断是否从吸附的开始起经过了预先设定的时间(步骤S128)。在尽管经过了设定时间但吸附没有完成的情况下,控制部25结束第1动作。
如果吸附完成,则将固定机构15设定为锁定状态(步骤S129),将吸附手1上的上表面吸附单元16的位置固定。将倾斜机构12的缸12a开放(步骤S130)。由此,上表面吸附单元16及侧面吸附单元22成为能够相对于X-Y面倾斜的状态。驱动机构21通过缸21a的动作使侧面吸附单元22下降(步骤S131)。向缸21a注入流体,将侧面吸附单元22相对于上表面吸附单元16的位置固定。侧面吸附单元22开始吸附(步骤S132)。具体而言,控制部25使负压产生装置140动作,将吸附部22b的内部排气。
缸19使侧面吸附单元22朝向前方移动(步骤S133)。如图16的(a)所示,侧面吸附单元22与物品A的侧面接触。控制部25判断由侧面吸附单元22进行的物品A的吸附是否完成(步骤S134)。吸附是否完成基于侧面吸附单元22的压力来判断。如果判断为吸附没有完成,则继续由侧面吸附单元22进行的吸附。控制部25判断从吸附的开始起是否经过了预先设定的时间(步骤S135)。在尽管经过了设定时间但吸附没有完成的情况下,控制部25结束第1动作。
如果吸附完成,则升降装置132使吸附手1稍稍上升(步骤S136)。此时,由于倾斜机构12的缸12a开放,所以由于吸附机构5及物品A的重量缸12a伸长。如图16的(b)所示,上表面吸附单元16及侧面吸附单元22相对于X-Y面倾斜。在步骤S136之后,水平移动装置131使吸附手1朝向输送机150沿着X-Y面移动(图14的步骤S140)。由此,如图16的(c)所示,将保持的物品A输送到输送机150之上。侧面吸附单元22结束向物品A的侧面的吸附(步骤S141)。具体而言,控制部25使侧面吸附单元22中的压力上升。例如,控制部25将侧面吸附单元22的内部空间向大气开放。
缸19使侧面吸附单元22朝向后方移动(步骤S142)。由此,侧面吸附单元22从物品A离开。控制部25判断由侧面吸附单元22吸附的物品A的侧面是否已释放(步骤S143)。侧面是否已释放,基于吸附部22b中的压力来判断。如果判断为吸附的侧面未释放,则控制部25待机。如果在待机中各吸附部22b的压力上升,则侧面释放。此外,在待机中,控制部25判断从向侧面的吸附的结束起是否经过了预先设定的时间(步骤S144)。在尽管经过了设定时间但侧面未释放的情况下,控制部25结束第1动作。
如果吸附的侧面释放,则上表面吸附单元16结束向物品A的上表面的吸附(步骤S145)。具体而言,控制部25使吸附部16b的压力上升。例如,控制部25将吸附部16b的内部向大气开放。将驱动机构21的缸21a开放(步骤S146)。控制部25判断由上表面吸附单元16吸附的物品A的上表面是否已释放(步骤S147)。上表面是否已释放,基于吸附部16b中的压力来判断。在各吸附部16b的压力超过预先设定的阈值的情况下,判断为上表面已释放。
如果判断为所吸附的上表面未释放,则控制部25待机。如果在待机中各吸附部16b的压力上升,则上表面释放。此外,在待机中,控制部25判断是否从向上表面的吸附的结束起经过了预先设定的时间(步骤S148)。在尽管经过了设定时间但上表面未释放的情况下,控制部25结束第1动作。如果上表面释放,则如图17的(a)所示,输送的物品A载置到输送机150之上。倾斜机构12使缸12a动作,以使上表面吸附单元16的吸附面成为水平(与X-Y面平行)(步骤S149)。如图17的(b)所示,升降装置132使吸附手1上升(步骤S150)。如图17的(c)所示,输送机150将载置的物品A向输送机C输送(步骤S151)。输送机C将物品A向其他场所输送。通过以上步骤,第1动作结束。
(第2判定)
图18是表示第2判定中的处理的流程图。
首先,控制部25判断是否存在取得了上表面的数据的物品(步骤S200)。接着,判断是否存在多个取得了数据的物品(步骤S201)。在取得了多个物品的数据的情况下,选择上表面处于最高的位置的物品(步骤S202)。判断是否存在多个选择出的物品(步骤S203)。在选择出多个物品的情况下,选择侧面位于最靠跟前侧的物品(步骤S204)。
在步骤S200中判断为不存在取得了数据的物品的情况下,不选择保持对象的物品而第2判定结束。在步骤S201中判断为取得了数据的物品仅为1个的情况下,将该1个物品选择为保持对象。在步骤S203中判断为在步骤S202中选择的物品仅为1个的情况下,选择该1个物品作为最终的保持对象。在步骤S204中选择的物品存在多个的情况下,从所选择的物品中选择任意的1个。例如,从多个物品中选择距测距传感器122a最近的物品。移载装置100通过第2动作使所选择的物品移动。
图19是用来说明第2判定中的处理的示意图。
作为一例,如图19所示那样积载多个物品A。首先,在第1判定中,与图12所示的例子同样地,基于第1检测器121的检测结果,作为能够取得上表面及侧面的双方的数据的物品而提取物品A1~A4。也可以还使用由第2检测器122得到的检测结果。关于物品A1和A2的组,在物品A1的上表面与物品A2的上表面之间存在阶梯差。关于物品A3和A4的组,在物品A3的上表面与物品A4的上表面之间存在阶梯差。因此,在第1判定的步骤S106中,判断为不存在满足条件的物品的组。
在第2判定的步骤S200中,作为取得了上表面的数据的物品而提取多个物品A1~A8。在步骤S202中,选择上表面处于最高的位置的物品A1及A8。由于选择了多个物品,所以在步骤S204中,选择侧面处于最靠跟前侧的物品A1作为第2动作的保持的对象。在将物品A1通过第2动作移动后,通过接着的第2判定,将物品A8选择为第2动作的保持的对象。
如上述那样,第2条件包括能够检测到任一个物品的上表面。第2条件相比第1条件容易。因此,在不满足第1条件的情况下也可能满足第2条件。通过使用了第2条件的第2判定,选择能够保持上表面的任一个物品。
(第2动作)
图20是表示第2动作的一部分的流程图。图21是表示第2动作的另一部分的流程图。图22的(a)、图22的(b)、图23的(a)~图23的(c)及图24的(a)~图24的(c)是表示第2动作的示意图。
水平移动装置131使吸附手1沿着X-Y面移动(步骤S220),如图22的(a)至图22的(b)所示,使吸附手1定位于在第2判定中选择的物品A的上方。控制部25确认侧面吸附单元22是否处于第2位置(步骤S221)。在侧面吸附单元22不处于第2位置的情况下,控制部25使驱动机构21动作,使侧面吸附单元22向第2位置移动。
将固定机构15设定为解锁状态(步骤S222),连结框架14成为能够移动的状态。如图23的(a)所示,升降装置132使吸附手1朝向物品A下降(步骤S223)。将吸附手1下降到选择的物品A的上表面的位置。上表面吸附单元16开始物品A的上表面的吸附(步骤S224)。具体而言,控制部25使负压产生装置140动作,将吸附部16b的内部排气。控制部25判断上表面吸附单元16是否与物品A接触(步骤S225)。接触基于检测器23来判断。如果判断为上表面吸附单元16没有与物品A接触,则升降装置132再次使吸附手1下降(步骤S226)。
如果判断为上表面吸附单元16与物品A接触,则控制部25判断由上表面吸附单元16进行的物品A的吸附是否完成(步骤S227)。与第1动作同样地,吸附是否完成基于上表面吸附单元16中的压力来判断。如果判断为吸附没有完成,则继续由上表面吸附单元16进行的吸附。控制部25判断从吸附的开始起是否经过了预先设定的时间(步骤S228)。在尽管经过了设定时间但吸附没有完成的情况下,控制部25结束第2动作。
如果吸附完成,则将固定机构15设定为锁定状态(步骤S229),吸附手1处的上表面吸附单元16的位置固定。升降装置132如图23的(b)所示,使吸附手1上升(步骤S230)。在步骤S230之后,水平移动装置131使吸附手1沿着X-Y面移动(图21的步骤S240)。如图23的(c)所示,将所保持的物品A输送到输送机150的上方。控制部25确认侧面吸附单元22是否处于第2位置(步骤S241)。在侧面吸附单元22不在第2位置的情况下,控制部25使驱动机构21动作,使侧面吸附单元22向第2位置移动。
升降装置132开始吸附手1的下降(步骤S242)。如图24的(a)所示,如果保持的物品A的底面的位置下降到输送机150的上表面的位置,则升降装置132结束吸附手1的下降(步骤S243)。物品A的底面的位置基于由第3检测器123得到的检测结果,由控制部25计算。上表面吸附单元16结束向物品A的上表面的吸附(步骤S244)。具体而言,控制部25使上表面吸附单元16的压力上升。例如,控制部25将上表面吸附单元16的内部空间向大气开放。控制部25判断由上表面吸附单元16吸附的物品A的上表面是否已释放(步骤S245)。与第1动作同样地,上表面是否已释放基于上表面吸附单元16的内部空间中的压力来判断。
如果判断为所吸附的上表面未释放,则控制部25待机。如果在待机中各吸附部16b的压力上升,则上表面释放。此外,在待机中,控制部25判断是否从向上表面的吸附的结束起经过了预先设定的时间(步骤S246)。在尽管经过了设定时间但上表面未释放的情况下,控制部25结束第2动作。如果上表面释放,则如图24的(b)所示,升降装置132使吸附手1上升(步骤S247)。如图24的(c)所示,输送机150将所载置的物品A向输送机C输送(步骤S248)。输送机C将物品A向其他场所输送。通过以上步骤,第2动作结束。
此外,在上述的例子中,在第1动作中,将多个物品滑动。并不限于该例,移载装置100也可以在第1动作中将多个物品保持之后,与第2动作同样地使它们上升。在此情况下,通过保持物品的上表面和侧面的双方,能够抑制在物品的局部作用很大的力。例如,能够减小物品损伤的可能性。在第1动作中使多个物品上升的情况下,步骤S106的判断能够省略。移载装置100也可以根据在步骤S106的判断中是否满足条件,来切换使多个物品滑动还是上升。
说明实施方式的优点。
关于物品的移载装置存在各种各样的要求。例如,对于移载装置要求作业效率的提高。即,要求能够以更短的时间移载更多的物品。以往,存在吸附1个物品的上表面并移载该物品的装置。关于该移载装置,由于仅能够将物品1个个地移载,所以作业效率不佳。关于该课题,也存在能够吸附多个物品的上表面并进行移载的装置。另一方面,在由上表面吸附进行的多个物品的移载中,特别在各物品重的情况下,移载可能变得不稳定。例如,有可能在移载中吸附解除而物品掉落。或者,有可能在吸附手上作用过大的负荷而吸附手损伤。
为了使移载的稳定性提高,存在不仅吸附上表面、还吸附侧面的移载装置。该移载装置在吸附多个物品各自的上表面及侧面后,使这些物品移动。由此,能够防止物品的掉落,减小向吸附手的负荷。另一方面,这样的移载装置主要在将相同尺寸的物品规律地积载的情况下使用。如果物品的尺寸是不规律的,则相邻的物品的上表面彼此的位置不同,难以将多个物品同时保持。或者,移载的物品与移载目标之间变得不平坦,不能将物品滑动。关于这一点,可以考虑区分使用在积载有相同尺寸的物品的情况和积载有不同尺寸的物品的情况下使用的移载装置的方法。但是,根据该方法,与移载装置的种类及移载的物品对应地,需要针对每个移载装置适当地分配托盘。因此,管理变得复杂。此外,移载装置的工作效率也有可能下降。
关于这些课题,在有关实施方式的移载装置100,能够切换用于移载的第1动作及第2动作。具体而言,在载置状态满足第1条件的情况下,由多个上表面吸附单元16分别吸附多个物品的上表面,并且由多个侧面吸附单元22分别吸附该多个物品的侧面。并且,在吸附了多个物品的上表面及侧面的状态下,将这些物品移动。在载置状态满足第2条件的情况下,通过多个上表面吸附单元16的1个,将1个物品的上表面吸附,将该1个物品移动。此时,侧面吸附单元22不吸附物品。
根据第1动作,通过吸附多个物品的上表面及侧面的双方,能够使多个物品稳定地移动。另一方面,根据第2动作,即使在不能执行由第1动作带来的多个物品的移动的情况下,也能够使物品1个个地可靠地移动。此外,通过与载置状态对应地切换第1动作及第2动作,不论物品的尺寸、积载方法等如何,都能够效率良好地使物品稳定地移动。
此外,由移载装置100进行的第1动作及第2动作的切换,基于根据第1检测器121的检测结果计算出的物品的载置状态。因此,例如不需要用来切换第1动作及第2动作的事前的信息的输入。即使在相同尺寸的物品的有规律的排列意外打乱的情况下,也能够将动作适当地切换。因此,能够稳定地继续移载,能够提高移载装置100的可靠性。
载置状态优选除了由第1检测器121得到的检测结果以外还基于由第2检测器122得到的检测结果来计算。通过进一步使用由第2检测器122得到的检测结果,与仅使用由第1检测器121得到的检测结果的情况相比,得到的信息增加。由此,能够更详细地计算载置状态,结果能够减小载置状态表示的物品的配置与实际的物品的配置的误差。
优选的是,移载装置100能够切换侧面吸附单元22处于第1位置的第1状态和侧面吸附单元22处于第2位置的第2状态。在第1动作中,侧面吸附单元22配置在能够将物品的侧面吸附的第1位置。在第2动作中,侧面吸附单元22配置在比第1位置靠上方的第2位置。由此,在第2动作中,当吸附手1保持物品A时,能够减小侧面吸附单元22与保持的对象以外的物品A干涉的可能性。
图25是示意地表示有关实施方式的其他吸附手的正视图。
在图2及图4所示的例子中,在吸附手1,多个上表面吸附单元16能够相互移动,多个侧面吸附单元22能够相互移动。有关实施方式的吸附手并不限定于该例。例如,在图25所示的吸附手1a,多个上表面吸附单元16彼此固定。多个侧面吸附单元22彼此固定。
在使用吸附手1a的情况下,多个上表面吸附单元16也能够将多个物品的上表面分别吸附。多个侧面吸附单元22能够将多个物品的侧面分别吸附。
更优选的是,移载装置100包括图2~图6所示的吸附手1。如果多个上表面吸附单元16能够相互在Z方向上移动,则即使在多个物品的上表面彼此的位置不同的情况下,也能够将这些物品的上表面通过多个上表面吸附单元16同时吸附。能够将图11所示的流程图中的第2阈值设为更大。能够将多个物品同时保持的情形增加,能够提高移载的效率。
同样地,如果多个侧面吸附单元22能够相互在X方向上移动,则即使在多个物品的侧面彼此的位置不同的情况下,也能够将这些物品的侧面通过多个侧面吸附单元22同时吸附。能够将图11所示的流程图中的第4阈值设为更大。能够同时保持多个物品的情形增加,能够提高移载的效率。
(变形例)
移载装置100可以除了第1动作及第2动作以外还能够执行第3动作。第3动作关于保持的物品的数量、保持的方法或移载方法与第1动作及第2动作不同。
图26的(a)是示意地表示第3动作中的保持方法的正视图。图26的(b)是示意地表示第3动作中的保持方法的侧视图。
如图26的(a)及图26的(b)所示,在第3动作中,由吸附手1保持1个物品A。在图26的(a)的例子中,将1个物品A的上表面及侧面分别通过1个吸附机构5的上表面吸附单元16及侧面吸附单元22吸附。根据物品的尺寸,也可以将1个物品A的上表面及侧面通过多个上表面吸附单元16及多个侧面吸附单元22吸附。移载装置100使所保持的1个物品A一边在托盘P的上表面或其他物品A的上表面滑动一边移动。根据第3动作,由于能够将物品A的上表面及侧面吸附,所以与第2动作相比能够将物品A更稳定地移动。此外,在第3动作中通过使物品A滑动,不需要使物品A大幅上升,所以与第2动作相比能够缩短移载时间。
图27是表示有关实施方式的变形例的移载装置的移载方法的概要的流程图。
图27所示的移载方法M2与图10所示的移载方法M1相比还包括步骤S3及S3a。控制部25与移载方法M1同样地,执行步骤S1。在不满足第1条件的情况下,控制部25判断载置状态是否满足第3条件(步骤S3:第3判定)。在满足第3条件的情况下,控制部25执行第3动作(步骤S3a)。在不满足第3条件的情况下,控制部25判定载置状态是否满足第2条件(步骤S2)。以后,执行与移载方法M1同样的步骤。
(第3判定)
图28是表示第3判定中的处理的流程图。
首先,控制部25判断是否存在取得了上表面及侧面的数据的物品(步骤S300)。在存在取得了数据的物品的情况下,控制部25判断该物品的移动路径中的阶梯差是否小于第5阈值(步骤S301)。移动路径与第1动作同样地是其他物品的上表面或托盘P的上表面。在阶梯差小于第5阈值的情况下,控制部25判断是否存在多个满足步骤S301的条件的物品(步骤S302)。在多个物品满足步骤S301的条件的情况下,控制部25选择上表面处于最高的位置的物品(步骤S303)。控制部25判断是否存在多个选择出的物品(步骤S304)。在选择出多个物品的情况下,控制部25选择侧面位于最靠跟前侧的物品(步骤S305)。另外,在步骤S305中选择出的物品存在多个的情况下,从选择出的物品中选择任意的1个。例如,从多个物品中选择距测距传感器122a最近的物品。移载装置100通过第3动作使所选择的物品移动。
图29是用来说明第3判定中的处理的示意图。
作为一例,如图29所示,积载有多个物品A。在第1判定中,与图19所示的例子同样地,判断为不存在满足条件的物品的组。在第3判定中,作为取得了上表面及侧面的数据的物品而提取物品A1~A4。
在步骤S301中,将物品A3的上表面及物品A5的上表面判定为物品A1的移动路径。将物品A4的上表面及物品A6的上表面判定为物品A2的移动路径。在物品A3的上表面与物品A5的上表面之间存在阶梯差。例如,判定移动路径中的阶梯差为第5阈值以上。另一方面,在物品A4的上表面与物品A6的上表面之间不存在阶梯差。判定为移动路径中的阶梯差小于第5阈值。此外,在物品A3与输送机150之间以及物品A4与输送机150之间不存在其他物品。因此,判断为物品A3及A4各自的移动路径中的阶梯差小于第5阈值。结果,判断为多个物品A2~A4满足步骤S301的条件。
在步骤S303中,从多个物品A2~A4中选择上表面处于最高的位置的物品A2。由此,将物品A2选择为第3动作的保持的对象。在物品A2通过第3动作移载之后,通过接下来的第3判定,将物品A4选择为第3动作的保持的对象。
如上述那样,用于第3动作的第3条件包括能够取得上表面及侧面的数据、能够将物品A沿着X方向滑动。通过使用第3条件的第3判定,选择能够稳定地移动的1个物品。
在第3判定中,也可以仅使用上述的条件的一部分。通过将条件放宽,虽然保持或移载的稳定性可能下降,但能够将物品的上表面及侧面同时保持的情形增加。与执行第2动作的情况相比,有可能能够提高移载的稳定性。
第3动作除了保持的物品的数量不同以外,与第1动作实质上相同。在第3动作中,关于1个物品执行与图13~图17同样的动作。
并不限于上述的例子,移载装置100在第3动作中,也可以在将物品保持之后与第2动作同样地使物品上升。在此情况下,也能够通过保持物品的上表面和侧面的双方,抑制在物品的局部作用很大的力。例如,能够减小物品损伤的可能性。在第3动作中使物品上升的情况下,步骤S301的判断能够省略。移载装置100也可以根据在步骤S301的判断中是否满足条件,来切换是使物品滑动还是上升。
根据变形例,在不能执行第1动作的情况下也能够执行第3动作。通过执行第3动作,能够使物品的移动的稳定性提高。
图30是表示硬件结构的示意图。
控制部25例如包括图30所示的硬件结构。图30所示的处理装置90包括CPU 91、ROM92、RAM 93、存储装置94、输入接口95、输出接口96及通信接口97。
ROM 92保存有对计算机的动作进行控制的程序。在ROM 92中,保存有为了使计算机实现上述的各处理而需要的程序。RAM 93作为将保存在ROM 92中的程序展开的存储区域发挥功能。
CPU 91包括处理电路。CPU 91将RAM 93作为工作存储器,执行存储在ROM 92或存储装置94的至少任一个中的程序。在程序的执行中,CPU 91经由系统总线98对各结构进行控制,执行各种处理。
存储装置94存储程序的执行所需要的数据及通过程序的执行得到的数据。
输入接口(I/F)95将处理装置90与输入装置95a连接。输入I/F 95例如是USB等串行总线接口。CPU 91能够经由输入I/F 95从输入装置95a读入各种数据。
输出接口(I/F)96将处理装置90与输出装置96a连接。输出I/F 96例如是DigitalVisual Interface(数字视频接口,DVI)或High-Definition Multimedia Interface(高清多媒体接口,HDMI(注册商标))等影像输出接口。CPU 91能够经由输出I/F 96向输出装置96a发送数据,使输出装置96a显示图像。
通信接口(I/F)97将处理装置90外部的服务器97a与处理装置90连接。通信I/F 97例如是LAN卡等的网卡。CPU 91能够经由通信I/F 97从服务器97a读入各种数据。照相机99a对物品进行摄影,将图像保存到服务器97a中。照相机99a作为摄像部121a发挥功能。LRF99b及99c测量距离,将测量结果保存到服务器97a中。LRF 99b及99c分别作为测距传感器122a及123a发挥功能。
存储装置94包括从Hard Disk Drive(硬盘驱动器,HDD)及Solid State Drive(固态硬盘,SSD)中选择的1个以上。输入装置95a包括从鼠标、键盘、麦克风(声音输入)及触控板中选择的1个以上。输出装置96a包括从监视器及投影机中选择的1个以上。也可以使用如触摸面板那样具有输入装置95a和输出装置96a的两者的功能的设备。
也可以将上述的各种数据的处理作为能够使计算机执行的程序记录到磁盘(软盘及硬盘等)、光盘(CD-ROM、CD-R、CD-RW、DVD-ROM、DVD±R、DVD±RW等)、半导体存储器或其他非易失性的能够由计算机读取的记录介质(non-transitory computer-readablestorage medium)中。
例如,记录在记录介质中的信息能够由计算机(或嵌入系统)读出。在记录介质中,记录形式(存储形式)是任意的。例如,计算机从记录介质将程序读出,基于该程序使CPU执行记述在程序中的指示。在计算机中,程序的取得(或读出)也可以经由网络进行。
根据以上说明的实施方式,提供能够效率良好地使物品稳定地移动的移载装置、控制部(控制装置)、移载方法、程序及存储介质。
以上,例示了本发明的几个实施方式,但这些实施方式是作为例子提示的,不是要限定发明的范围。这些新的实施方式能够以其他各种各样的形态实施,在不脱离发明的主旨的范围内能够进行各种各样的省略、替换、变更。这些实施方式及其变形例包含在发明的范围或主旨中,并且包含在权利要求书所记载的发明和其等价的范围中。此外,上述的各实施方式能够相互组合来实施。
实施方式也可以包括以下的方案。
(方案1)
一种移载装置,其具有:
吸附手,具有包括多个第1吸附部并在第1方向上与物品接触的第1吸附单元和包括多个第2吸附部并在与上述第1方向相交的第2方向上与上述物品接触的第2吸附单元,上述第1吸附单元及上述第2吸附单元在与平行于上述第1方向及上述第2方向的面相交的第3方向上设置有多个;
移动装置,使上述吸附手移动;
第1检测器,检测上述物品的与上述第1方向相交的第1面及与上述第2方向相交的第2面;以及
控制部,基于来自上述第1检测器的第1检测结果,对上述吸附手及上述移动装置进行控制;
上述控制部执行:
第1动作,在使用上述第1检测结果计算出的多个上述物品的载置状态满足第1条件的情况下,通过多个上述第1吸附单元将上述多个物品的上述第1面分别吸附,通过多个上述第2吸附单元将上述多个物品的上述第2面分别吸附,使上述多个物品移动;以及
第2动作,在上述载置状态满足第2条件的情况下,通过上述多个第1吸附单元的1个将上述多个物品中的1个物品的上述第1面吸附,不使上述多个第2吸附单元进行吸附,使上述多个物品中的上述1个物品移动。
(方案2)
如方案1所述的移载装置,其中,
还具有检测上述物品的与上述第2方向相交的第2面的第2检测器;
上述载置状态除了上述第1检测结果以外还基于来自上述第2检测器的第2检测结果计算。
(方案3)
如方案1或2所述的移载装置,其中,
上述控制部还执行:
第3动作,在上述载置状态满足第3条件的情况下,通过上述多个第1吸附单元的1个将上述多个物品中的1个物品的上述第1面吸附,通过上述多个第2吸附单元的1个将上述多个物品中的上述1个物品的上述第2面吸附,使上述多个物品中的上述1个物品移动。
(方案4)
如方案3所述的移载装置,其中,
上述控制部执行:
第1判定,判定上述载置状态是否满足上述第1条件;
第2判定,判定上述载置状态是否满足上述第2条件;以及
第3判定,判定上述载置状态是否满足上述第3条件;
上述第3判定在上述第1判定之后执行;
上述第2判定在上述第3判定之后执行。
(方案5)
如方案4所述的移载装置,其中,
上述第1条件包括从以下条件中选择的1个以上:
能够检测到上述多个物品各自的上述第1面及上述第2面;
上述多个物品在上述第3方向上排列;
能够将上述多个物品的上述第1面通过上述多个第1吸附单元同时吸附;
能够将上述多个物品的上述第2面通过上述多个第2吸附单元同时吸附;以及
能够将上述多个物品沿着上述第2方向同时滑动。
(方案6)
如方案5所述的移载装置,其中,
上述第2条件包括能够检测到上述多个物品中的上述1个物品的上述第1面。
(方案7)
如方案5或6所述的移载装置,其中,
上述第3条件包括:
能够检测到上述多个物品中的上述1个物品的上述第1面及上述第2面;或
能够将上述多个物品中的上述1个物品沿着上述第2方向滑动。
(方案8)
如方案1~7中任一项所述的移载装置,其中,
上述控制部在执行上述第1动作时将上述多个第2吸附单元配置在第1位置,在执行上述第2动作时将上述多个第2吸附单元配置在比上述第1位置靠上方的第2位置。
(方案9)
如方案1~8中任一项所述的移载装置,其中,
上述控制部在上述第1动作中,使上述多个物品沿着上述第2方向滑动;
上述控制部在上述第2动作中,使上述多个物品中的上述1个物品上升而移动。
(方案10)
如方案1~9中任一项所述的移载装置,其中,
在上述吸附手,上述多个第1吸附单元能够在上述第1方向上相互移动。
(方案11)
如方案1~10中任一项所述的移载装置,其中,
在上述吸附手,上述多个第2吸附单元能够在上述第2方向上相互移动。
(方案12)
如方案1~11中任一项所述的移载装置,其中,
上述多个第1吸附部分别包括:
第1杆,沿着上述第1方向延伸;以及
第1吸附垫板,设置在上述第1杆的前端。
(方案13)
如方案1~12中任一项所述的移载装置,其中,
上述多个第2吸附部分别包括:
第2杆,沿着上述第2方向延伸;以及
第2吸附垫板,设置在上述第2杆的前端。
(方案14)
如方案1~13中任一项所述的移载装置,其中,
还具有载置由上述吸附手保持的1个以上的上述物品、使所载置的上述1个以上的物品移动的输送机。
(方案15)
如方案14所述的移载装置,其中,
上述输送机将所载置的上述1个以上的物品向与上述输送机相邻而设置的输送装置输送。
(方案16)
如方案14或15所述的移载装置,其中,
还具有使上述输送机沿着上述第1方向移动的升降装置。
以上,例示了本发明的几个实施方式,但这些实施方式是作为例子提示的,不是要限定发明的范围。这些新的实施方式能够以其他各种各样的形态实施,在不脱离发明的主旨的范围内能够进行各种各样的省略、替换、变更。这些实施方式及其变形例包含在发明的范围或主旨中,并且包含在权利要求书所记载的发明和其等价的范围中。此外,上述的各实施方式能够相互组合来实施。