支腿运动调节系统、方法以及工程车辆
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及工程设备控制领域,具体地涉及一种支腿运动调节系统、方法以及工程车辆。
背景技术
工程车辆在进行作业时,往往会使用支腿进行支撑。支腿和车辆底盘是一体的,形成硬链接;轮胎和底盘是经过悬挂系统衔接,形成软链接。当工程车辆利用支腿进行支撑时,轮胎就是被悬架在空中的,尽可能使轮胎悬空减少其磨损。目前,操作人员在作业前进行支腿支撑工作流程为:1、寻找平坦地面进行展臂(支腿臂的伸展与张开);2、人工操作,人工依据经验操作支腿升降油缸进行支撑,依据轮胎悬空大概角度判断支腿支撑盘的伸长长度是否合理。
但人工操作的支腿支撑方式会导致各支腿升降油缸的载荷不一致,导致支腿支撑盘伸长长度不均匀,即各个支腿支撑力不均匀,使底盘进入一个非平衡受力状态,车辆实际是倾斜的,长此以往会导致车辆底盘变形,严重时易使车辆侧翻等事故。所以,如何实现支腿的自调节稳定,以摆脱人工操作的弊端,是亟需解决的问题。
发明内容
本发明实施例的目的是为了克服现有技术中人工操作进行支腿支撑会导致各支腿受力不均这一问题,提供一种支腿运动调节系统、方法以及工程车辆。
本申请第一方面提供了一种支腿运动调节系统,应用于工程车辆,工程车辆的支腿与底盘相连接,支腿包括支腿臂、支腿升降油缸以及支腿支撑盘,系统包括:
运动告警装置,包括支腿臂运动检测模块、支腿臂运动告警模块、支腿支撑盘升降检测模块、支腿支撑盘升降告警模块以及信号输出模块;
支腿臂运动检测模块,用于在支腿臂运动的过程中,通过惯性测量单元获取支腿臂与水平面的水平夹角,以及支腿臂与底盘的中轴线的航向角,并记录支腿臂的运动时间;
支腿臂运动告警模块,用于在水平角与航向角不符合第一预设要求的情况下,根据水平角、航向角以及运动时间,生成第一告警信号;
支腿支撑盘升降检测模块,用于在支腿支撑盘的升降过程中,通过压力检测装置获取支腿升降油缸的载荷,通过测距装置获取支腿支撑盘的伸长长度,并记录支腿盘的升降时间;
支腿支撑盘升降告警模块,用于在载荷与伸长长度不符合第二预设要求的情况下,根据载荷、伸长长度以及升降时间,生成第二告警信号;
信号输出模块,用于输出第一告警信号或第二告警信号至车载控制器;
车载控制器,用于根据第一告警信号或第二告警信号调节支腿的运动,以使支腿的运动符合预设要求。
在本申请的一个实施例中,第一告警信号包括航向角告警信号与水平夹角告警信号,支腿臂运动告警模块,包括:
航向角告警单元,用于在航向角大于运动时间对应的最大航向角,或小于运动时间对应的最小航向角的情况下,根据航向角与运动时间生成航向角告警信号;
水平夹角告警单元,用于在水平夹角大于水平夹角阈值的情况下,根据水平夹角生成水平夹角告警信号。
在本申请的一个实施例中,信号输出模块包括:
航向角告警信号输出单元,用于输出航向角告警信号至车载控制器;
水平夹角告警信号输出单元,用于输出水平夹角告警信号至车载控制器。
在本申请的一个实施例中,车载控制器包括:
航向角控制单元,用于根据航向角告警信号调节支腿臂的运动速度,以使航向角不超过最大航向角且不小于最小航向角;
水平夹角控制单元,用于根据水平夹角告警信号降低支腿臂的运动速度,以使水平夹角不超过水平夹角阈值。
在本申请的一个实施例中,支腿支撑盘升降告警模块包括:
载荷告警单元,用于在载荷大于升降时间对应的最大载荷,或小于升降时间对应的最小载荷的情况下,根据载荷与升降时间生成第二告警信号;
伸长长度告警单元,用于在伸长长度大于升降时间对应的最大伸长长度,或小于升降时间对应的最小伸长长度的情况下,根据伸长长度与升降时间生成第二告警信号。
在本申请的一个实施例中,信号输出模块包括:
第二告警信号输出单元,用于输出第二告警信号至车载控制器。
在本申请的一个实施例中,车载控制器包括:
载荷与伸长长度控制单元,用于根据第二告警信号升高或降低支腿支撑盘的升降速度,以使载荷不超过最大载荷且不小于最小载荷,且伸长长度不超过最大伸长长度且不小于最小伸长长度。
在本申请的一个实施例中,系统还包括:
支腿安全提示灯,用于根据第一告警信号或第二告警信号对应的闪烁策略进行闪烁。
本申请第二方面提供了一种支腿运动调节方法,应用于本申请第一方面提供的支腿运动调节系统,方法包括:
在支腿臂运动的过程中,通过惯性测量单元获取支腿臂与水平面的水平夹角,以及支腿臂与底盘的中轴线的航向角,并记录支腿臂的运动时间;
在水平角与航向角不符合第一预设要求的情况下,根据水平角、航向角以及运动时间,生成第一告警信号;
在支腿支撑盘的升降过程中,通过压力检测装置获取支腿升降油缸的载荷,通过测距装置获取支腿支撑盘的伸长长度,并记录支腿盘的升降时间;
在载荷与伸长长度不符合第二预设要求的情况下,根据载荷、伸长长度以及升降时间,生成第二告警信号;
输出第一告警信号或第二告警信号;
根据第一告警信号或第二告警信号调节支腿的运动,以使支腿的运动符合预设要求。
本申请第三方面提供了一种工程车辆,工程车辆包括本申请第一方面提供的支腿运动调节系统。
通过上述技术方案,支腿运动调节系统的运动告警装置可以通过获取到的支腿运动过程中的参数,输出相应的调节信号至车载控制器进行支腿运动的调节,使支腿的运动符合预设要求,实现了支腿运动的自动调节,即在不依赖于人工操作的情况下,保证了各支腿伸展程度的一致、各支腿升降油缸的载荷一致、各支腿支撑盘伸长长度均匀,使底盘处于一个均匀受力的平衡状态,进而保证了工程车辆的稳定。
本发明实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
附图是用来提供对本发明实施例的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明实施例,但并不构成对本发明实施例的限制。在附图中:
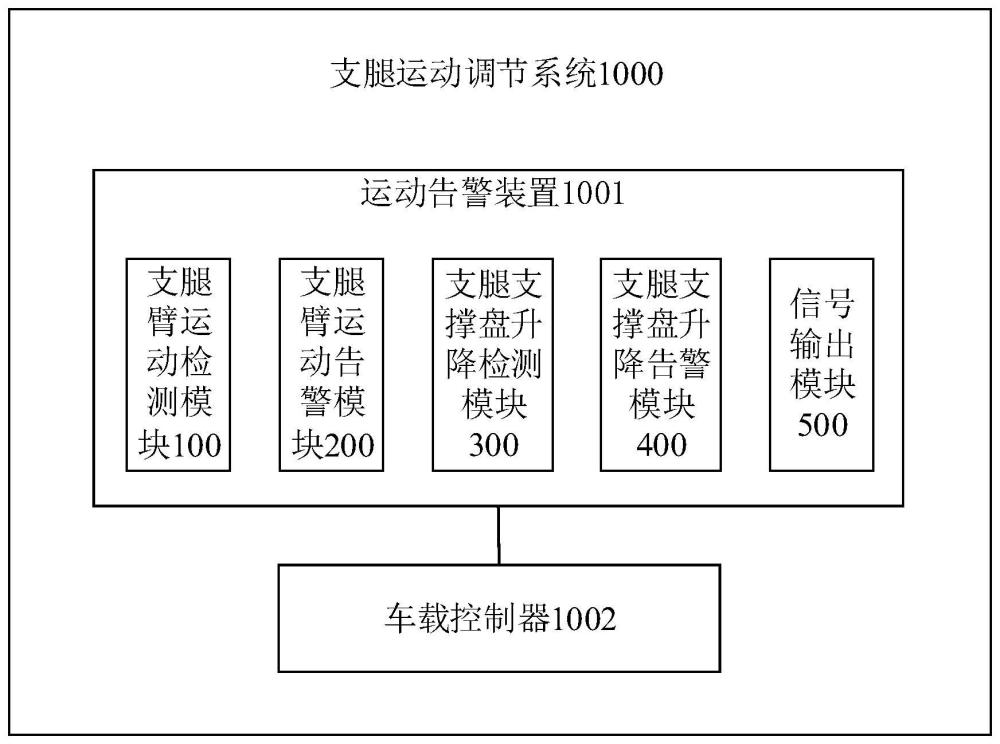
图1示意性示出了根据本申请实施例的一种支腿运动调节系统的结构框图;
图2示意性示出了根据本申请实施例的一种支腿的结构示意图;
图3示意性示出了本申请实施例提供的一种利用支腿进行支撑的工程车辆的俯视图;
图4示意性示出了根据本申请实施例的另一种支腿运动调节系统的结构框图;
图5示意性示出了根据本申请实施例的一种支腿臂在伸展时航向角的上下限与运动时间的坐标图;
图6示意性示出了根据本申请实施例的一种支腿运动调节方法的流程图。
具体实施方式
以下结合附图对本申请的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本申请,并不用于限制本申请。
需要说明,若本申请实施例中有涉及方向性指示(诸如上、下、左、右、前、后……),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
另外,若本申请实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。而且,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本申请要求的保护范围之内。
工程车辆在利用支腿进行支撑时,依靠操作人员进行支腿支撑的操作流程时往往会出现各支腿升降油缸不一致、各支腿伸长长度不均匀等导致底盘无法受力平衡的问题,易使工程车辆侧翻。所以,在工程车辆的作业过程中,需要对支腿的运动进行调节,以保证各支腿受力的平衡。
图1示意性示出了根据本申请实施例的一种支腿运动调节系统1000的结构框图,如图1所示,在本申请的一个实施例中,提供了一种支腿运动调节系统1000,应用于工程车辆,工程车辆的支腿与底盘相连接,支腿包括支腿臂、支腿升降油缸以及支腿支撑盘,系统1000包括:
运动告警装置1001,包括支腿臂运动检测模块100、支腿臂运动告警模块200、支腿支撑盘升降检测模块300、支腿支撑盘升降告警模块400以及信号输出模块500;
支腿臂运动检测模块100,用于在支腿臂运动的过程中,通过惯性测量单元获取支腿臂与水平面的水平夹角,以及支腿臂与底盘的中轴线的航向角,并记录支腿臂的运动时间;
支腿臂运动告警模块200,用于在水平角与航向角不符合第一预设要求的情况下,根据水平角、航向角以及运动时间,生成第一告警信号;
支腿支撑盘升降检测模块300,用于在支腿支撑盘的升降过程中,通过压力检测装置获取支腿升降油缸的载荷,通过测距装置获取支腿支撑盘的伸长长度,并记录支腿盘的升降时间;
支腿支撑盘升降告警模块400,用于在载荷与伸长长度不符合第二预设要求的情况下,根据载荷、伸长长度以及升降时间,生成第二告警信号;
信号输出模块500,用于输出第一告警信号或第二告警信号至车载控制器1002;
车载控制器1002,用于根据第一告警信号或第二告警信号调节支腿的运动,以使支腿的运动符合预设要求。
图2示意性示出了根据本申请实施例的一种支腿的结构示意图,如图2所示,支腿包括用于伸展、张开的支腿臂10(包括固定支腿11与活动支腿12)、用于进行地面支撑的支腿支撑盘20以及控制支腿支撑盘20升降的支腿升降油缸30。在工程车辆进行支腿支撑前,支腿臂10先进行伸展、张开,支腿升降油缸30再控制支腿支撑盘20伸长、下降至地面进行支撑;待工程车辆作业完成后,支腿升降油缸30泄压,支腿支撑盘20回缩、上升离开地面,支腿臂10再收缩合拢。本申请实施例所提供的支腿运动调节系统1000中,包括了用于进行支腿运动控制的车载控制器1002,即车载ECU(Electronic Control Unit,电子控制单元),车载控制器1002可以自动控制支腿臂10进行伸展,以及控制支腿支撑盘20进行升降。本申请实施例所提供的支腿运动调节系统1000中还包括用于进行支腿运动告警的运动告警装置1001。示例性地,运动告警装置1001可以包括存储控制逻辑的存储器与数据处理器,运动告警装置1001与车载控制器1002可以通过CAN(CAN,Controller Area Network,控制器局域网总线)协议进行连接,并直接通过车载电源的有线接入获取工作用电。
运动告警装置1001的数据处理器包括支腿臂运动检测模块100与支腿支撑盘升降检测模块300,两个模块可以分别与不同的参数检测装置通信连接并进行数据传输,支腿臂运动检测模块100与惯性测量单元(IMU,Inertia Measurement Unit)通信连接,支腿支撑盘升降检测模块300与压力检测装置以及测距装置通信连接。示例性地,支腿臂运动检测模块100、惯性测量单元、支腿支撑盘升降检测模块300、压力检测装置以及测距装置均包括或连接一个可以利用433Mhz无线频段技术进行无线数据传输的TTL(Transistor-TransistorLogic,晶体管-晶体管逻辑)电路,避免实线连接通信造成的布线困难。
其中,支腿臂运动检测模块100在支腿臂10的运动过程中,即支腿臂10伸展张开或缩回合拢的过程中,记录支腿臂10的运动时间,并通过惯性测量单元获取支腿臂10与水平面的水平夹角,水平夹角可以表征支腿臂10运动过程中的振动幅度;支腿臂运动检测模块100还可以通过惯性测量单元获取支腿臂10与底盘的中轴线的航向角,支腿臂10与底盘的中轴线的航向角可以表征支腿臂10伸展与张开的程度。车辆航向角指的是车辆质心的速度与X轴正轴方向的夹角,图3示意性示出了本申请实施例提供的一种利用支腿进行支撑的工程车辆的俯视图,如图3所示,本申请实施例所述的支腿臂10与底盘的中轴线的航向角为车辆航向角的化用,为图3中支腿臂10与工程车辆底盘中轴线沿X轴正轴方向的夹角(∠A)。
支腿支撑盘升降检测模块300在支腿支撑盘20的升降过程中,记录支腿支撑盘20的升降时间,通过压力检测装置获取支腿升降油缸30的载荷,并通过测距装置获取支腿支撑盘20的伸长长度,上述载荷与伸长长度均能表征支腿支撑盘20的升降或伸缩程度。示例性地,压力检测装置可以为压力传感器,测距装置可以为激光测距仪。
因各支腿相对与工程车辆呈分布式布局,且因支腿的运动导致支腿的形态多变,故对各参数检测装置进行实线连接以进行供电也会导致布线困难。所以,惯性测量单元、压力检测装置以及测距装置可以分别与一个无线供电模组连接。与无线供电模组相适配的,运动告警装置1001还可以包括一个无线充电模组,用于向各个无线供电模组供电,实现各参数检测装置的无线供电。
示例性地,与上述无线供电模组相适配地,惯性测量单元、压力检测装置以及测距装置还可以与一个内置了低功耗工作逻辑的微处理器相连,实现低功耗地工作,且微处理器利用GPIO(General Propose Input Output,通用输入输出端口)控制无线供电模组的供电开关,当微处理器所连接的外设为惯性测量单元、压力检测装置以及测距装置时,才会通过GPIO打开供电开关,否则供电开关处于关闭状态。
支腿臂运动检测模块100获取到的上述水平夹角与航向角,以及记录的运动时间,被运动告警装置1001包括的支腿臂运动告警模块200用于进行是否符合第一预设要求的判定,即判断支腿臂10的运动是否需要进行调节。当支腿臂运动告警模块200判断上述水平角与航向角不符合第一预设要求时,生成第一告警信号,信号输出模块500输出该第一告警信号至车载控制器1002,车载控制器1002根据接收到的第一告警信号调节支腿臂10的运动,使支腿臂10的运动符合第一预设要求。
示例性地,运动告警装置1001可以通过车载控制器1002获取支腿数据库中的相关经验数据作为第一预设要求,支腿数据库用于存储可以保证支腿进行稳定、平衡支撑的经验数据。
图4示意性示出了根据本申请实施例的另一种支腿运动调节系统的结构框图,如图4所示,在本申请的一个实施例中,第一告警信号包括航向角告警信号与水平夹角告警信号,支腿臂运动告警模块200包括:
航向角告警单元210,用于在航向角大于运动时间对应的最大航向角,或小于运动时间对应的最小航向角的情况下,根据航向角与运动时间生成航向角告警信号;
水平夹角告警单元220,用于在水平夹角大于水平夹角阈值的情况下,根据水平夹角生成水平夹角告警信号。
支腿臂运动告警模块200包括分别用于根据航向角进行告警的航向角告警单元210以及根据水平夹角进行告警的水平夹角告警单元220。图5示意性示出了根据本申请实施例的一种支腿臂10在伸展时航向角的上下限与运动时间的坐标图,如图5所示,在支腿臂10的伸展过程中,每个不同的运动时间均有航向角上限与下限,即最大航向角与最小航向角。示例性地,当前的运动时间t3的航向角为M,处于航向角上下限之间,即不超过t3对应的最大航向角1.1M也不小于t3对应的最小航向角0.9M,此时航向角符合第一预设要求;当前的运动时间t3的航向角若大于t3对应的最大航向角1.1M或小于t3对应的最小航向角0.9M,此时航向角不符合第一预设要求,即按照此时的支腿臂10的伸展速度,无法使航向角在预设时间内达到伸展过程的目标航向角区间,故需要降低或升高支腿臂10的伸展速度,航向角告警单元210即生成指示升高或降低支腿臂10伸展速度的航向角告警信号。同样的,在支腿臂10的回缩过程中,每个不同的运动时间均有航向角上限与下限,即最大航向角与最小航向角,当前的运动时间的航向角若大于该运动时间对应的最大航向角或小于该运动时间对应的最小航向角,此时航向角不符合第一预设要求,即按照此时的支腿臂10的回缩速度,无法在预设时间内回缩到回缩过程的目标航向角区间,故需要降低或升高支腿臂10的回缩速度,航向角告警单元210即生成指示降低或升高支腿臂10回缩速度的航向角告警信号。
水平夹角表征支腿臂10的振动情况,故可以用于支腿臂10运动过程中支腿臂10的稳定性监测。当水平夹角告警单元220判断当前水平夹角大于水平夹角阈值时,表示当前支腿臂10伸展或回缩的速度过快,导致支腿臂10的稳定性不足,故生成水平角夹角告警信号,指示降低支腿臂10的伸展或回缩速度。
在本申请的一个实施例中,信号输出模块500包括:
航向角告警信号输出单元510,用于输出航向角告警信号至车载控制器1002;
水平夹角告警信号输出单元520,用于输出水平夹角告警信号至车载控制器1002。
第一告警信号通过信号输出模块500输出,对应于航向角告警单单元与水平夹角告警单元220,信号输出模块500包括航向角告警信号输出单元510与水平夹角告警信号输出单元520,分别用于将航向角告警信号与水平夹角告警信号输出至车载控制器1002。
在本申请的一个实施例中,车载控制器1002包括:
航向角控制单元201,用于根据航向角告警信号调节支腿臂10的运动速度,以使航向角不超过最大航向角且不小于最小航向角;
水平夹角控制单元202,用于根据水平夹角告警信号降低支腿臂10的运动速度,以使水平夹角不超过水平夹角阈值。
对应于航向角告警单单元与水平夹角告警单元220,车载控制器1002包括航向角控制单元201与水平夹角控制单元202。航向角控制单元201在获取到航向角告警信号后,根据航向角告警信号,升高或降低支腿臂10伸展或回缩的速度,使航向角不超过最大航向角且不小于最小航向角,保证航向角在预设时间内可以达到伸展过程或回缩过程的目标航向角区间;水平夹角控制单元202在获取到水平夹角告警信号后,降低支腿臂10伸展或回缩的速度,减小支腿臂10的振动,使支腿臂10保持稳定。
支腿支撑盘升降检测模块300获取到的上述载荷与伸长长度,以及记录的升降时间,被运动告警装置1001包括的支腿支撑盘升降告警模块400用于进行是否符合第二预设要求的判定,即判断支腿支撑盘20的升降是否需要进行调节。当支腿支撑盘升降检测模块300判断上述载荷与伸长长度不符合第二预设要求时,生成第二告警信号。
示例性地,运动告警装置1001可以通过车载控制器1002获取支腿数据库中的相关经验数据作为第二预设要求,支腿数据库用于存储可以保证支腿进行稳定、平衡支撑的经验数据。
在本申请的一个实施例中,支腿支撑盘升降告警模块400包括:
载荷告警单元410,用于在载荷大于升降时间对应的最大载荷,或小于升降时间对应的最小载荷的情况下,根据载荷与升降时间生成第二告警信号;
伸长长度告警单元420,用于如果在伸长长度大于升降时间对应的最大伸长长度,或小于升降时间对应的最小伸长长度的情况下,根据伸长长度与升降时间生成第二告警信号。
支腿支撑盘升降告警模块400包括分别用于根据支腿升降油缸30的载荷进行告警的载荷告警单元410以及根据支腿支撑盘20的伸长长度进行告警的伸长长度告警单元420。支腿支撑盘20的升降即支腿支撑盘20的回缩与伸长,故升降时间也就包括的伸长时间与回缩时间。与航向角是否符合第一预设要求的判断过程类似,在支腿支撑盘20的伸长过程中,每个不同的伸长时间均有载荷上限与下限,即最大载荷与最小载荷。当前的伸长时间的载荷若大于该伸长时间对应的最大载荷或小于该伸长时间对应的最小载荷,此时载荷不符合第二预设要求,即按照此时的支腿支撑盘20的伸长速度,无法使载荷在预设时间内达到伸长过程的目标载荷区间,故需要降低或升高支腿支撑盘20的伸长速度,载荷告警单元410即生成指示降低或升高支腿支撑盘20的伸长速度的第二告警信号。同样的,在支腿支撑盘20的回缩过程中,每个不同的回缩时间均有载荷上限与下限,即最大载荷与最小载荷,当前的回缩时间的载荷若超过该回缩时间对应的最大载荷或小于该回缩时间对应的最小载荷,此时载荷不符合第二预设要求,即按照此时的支腿支撑盘20的回缩速度,无法在预设时间内回缩到回缩过程的目标载荷区间,故需要降低或升高支腿支撑盘20的回缩速度,载荷告警单元410即生成指示降低或升高支腿支撑盘20回缩速度的第二告警信号。
与支腿升降油缸30载荷相对应的是支腿支撑盘20的伸长长度,为了更好地保证各支腿的受力平衡,除了对上述载荷进行监测外,还需要对上述伸长长度进行监测。与载荷的监测过程类似,当伸长长度告警单元420判断当前伸长长度大于升降时间对应的最大伸长长度,或小于升降时间对应的最小伸长长度时,生成指示升高或降低支腿支撑盘20升降速度的第二告警信号。
在本申请的一个实施例中,信号输出模块500包括:
第二告警信号输出单元530,用于输出第二告警信号至车载控制器1002。
第二告警信号通过信号输出模块500输出,信号输出模块500包括的第二告警信号输出单元530用于将载荷告警单元410或伸长长度告警单元420生成的第二告警信号输出至车载控制器1002。
在本申请的一个实施例中,车载控制器1002包括:
载荷与伸长长度控制单元203,用于根据第二告警信号升高或降低支腿支撑盘20的升降速度,以使载荷不超过最大载荷且不小于最小载荷,且伸长长度不超过最大伸长长度且不小于最小伸长长度。
车载控制器1002中的载荷与伸长长度控制单元203在获取到第二告警信号后,根据第二告警信号,升高或降低支腿支撑盘20伸长或回缩的速度,使载荷不超过最大载荷且不小于最小载荷,保证载荷在预设时间内可以达到伸长过程或回缩过程的目标载荷区间。调节过程中,在使载荷不超过最大载荷且不小于最小载荷的同时,还需使伸长长度不超过最大伸长长度且不小于最小伸长长度,保证伸长长度在预设时间内可以达到伸长过程或回缩过程的目标伸长长度区间。
通过上述实施例中的支腿运动调节系统1000,运动告警装置1001可以通过获取到的支腿运动过程中的参数,输出相应的调节信号至车载控制器1002进行支腿运动的调节,使支腿的运动符合预设要求,实现了支腿运动的自动调节,即在不依赖于人工操作的情况下,保证了各支腿伸展程度的一致、各支腿升降油缸30的载荷一致、各支腿支撑盘20伸长长度均匀,使底盘处于一个均匀受力的平衡状态,进而保证了工程车辆的稳定。
在本申请的一个实施例中,系统1000还包括:
支腿安全提示灯1003,用于根据第一告警信号或第二告警信号对应的闪烁策略进行闪烁。
支腿安全提示灯1003可以与运动告警装置1001集成也可以外接于运动告警装置1001,示例性地,支腿安全提示灯1003为三色灯,其中绿灯闪烁表示目前的支腿运动符合预设要求,黄灯闪烁表示支腿安全提示灯1003接收到了第一告警信号或第二告警信号,目前支腿运动不符合预设要求,直至车载控制器1002调节支腿的运动直至支腿运动符合预设要求后,黄灯停止闪烁。支腿安全提示灯1003可以使操作人员了解当前支腿运动的状态,在黄灯闪烁期间停止作业,保证底盘的稳定与安全。
通过上述技术方案,运动告警装置1001可以通过获取到的支腿运动过程中的参数,输出相应的调节信号至车载控制器1002进行支腿运动的调节,使支腿的运动符合预设要求,并通过支腿安全提示灯1003进行相关的安全预警告知。实现了支腿运动的自动调节,即在不依赖于人工操作的情况下,保证了各支腿伸展程度的一致、各支腿升降油缸30的载荷一致、各支腿支撑盘20伸长长度均匀,使底盘处于一个均匀受力的平衡状态,进而保证了工程车辆的稳定。
图6示意性示出了根据本申请实施例的一种支腿运动调节方法的流程图,如图6所示,在本申请的一个实施例中,提供了一种支腿运动调节方法,应用于上述实施例中的支腿运动调节系统1000,方法包括:
步骤S100:在支腿臂10运动的过程中,通过惯性测量单元获取支腿臂10与水平面的水平夹角,以及支腿臂10与底盘的中轴线的航向角,并记录支腿臂10的运动时间;
步骤S200:在水平角与航向角不符合第一预设要求的情况下,根据水平角、航向角以及运动时间,生成第一告警信号;
步骤S300:在支腿支撑盘20的升降过程中,通过压力检测装置获取支腿升降油缸30的载荷,通过测距装置获取支腿支撑盘20的伸长长度,并记录支腿盘的升降时间;
步骤S400:在载荷与伸长长度不符合第二预设要求的情况下,根据载荷、伸长长度以及升降时间,生成第二告警信号;
步骤S500:输出第一告警信号或第二告警信号;
步骤S600:根据第一告警信号或第二告警信号调节支腿的运动,以使支腿的运动符合预设要求。
上述支腿运动调节方法S100-S600以上述实施例中的支腿运动调节系统1000作为主体进行,在实际的工作流程中,示例性地,运动告警装置1001首先从车载控制器1002获取支腿数据库中的相关经验数据作为支腿运动的预设要求,包括第一预设要求与第二预设要求,并与惯性测量单元、压力检测装置以及测距装置进行无线连接,将连接成功的信号传输至车载控制器1002。至此,运动告警装置1001检测与告警前的准备工作完成。在支腿臂10展开的过程中,运动告警装置1001获取到获取支腿臂10与水平面的水平夹角,以及支腿臂10与底盘的中轴线的航向角,判断水平夹角与航向角是否符合第一预设要求,即航向角是否处于运动时间对应的航向角上下限之间,以及水平夹角是否超出水平夹角阈值,若水平夹角或航向角不符合第一预设要求,生成对应的第一告警信号输出至车载控制器1002,使车载控制器1002对支腿臂10展开的速度进行调节,使水平夹角与航向角符合第一预设要求;在支腿支撑盘20的伸长过程中,运动告警装置1001获取到支腿升降油缸30的载荷,以及支腿支撑盘20的伸长长度,判断载荷与伸长长度是否符合第二预设要求,即载荷是否处于升降时间对应的载荷上下限之间,以及伸长长度是否处于升降时间对应的伸长长度上下限之间,若载荷或伸长长度不符合第二预设要求,生成对应的第二告警信号输出至车载控制器1002,使车载控制器1002对支腿支撑盘20的伸长速度进行调节,使载荷与伸长长度符合第二预设要求。工程车辆作业完成后,支腿支撑盘20回缩,支腿臂10回拢,运动告警装置1001同样在此过程中进行支腿运动的监测,并输出响应的告警信号至车载控制器1002进行运动调节。
通过上述支腿运动调节方法,实现了支腿运动的自动调节,即在不依赖于人工操作的情况下,保证了各支腿伸展程度的一致、各支腿升降油缸30的载荷一致、各支腿支撑盘20伸长长度均匀,使底盘处于一个均匀受力的平衡状态,进而保证了工程车辆的稳定。
在本申请的一个实施例中,提供了一种工程车辆,包括上述实施例中的支腿运动调节系统1000。
以上结合附图详细描述了本申请的优选实施方式,但是,本申请并不限于上述实施方式中的具体细节,在本申请的技术构思范围内,可以对本申请的技术方案进行多种简单变型,这些简单变型均属于本申请的保护范围。
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本申请对各种可能的组合方式不再另行说明。
此外,本申请的各种不同的实施方式之间也可以进行任意组合,只要其不违背本申请的思想,其同样应当视为本申请所公开的内容。
- 支腿结构以及工程车辆
- 一种工程车辆支腿用内置式可伸缩液压油管
- 用于车辆照明设备的调节系统,以及用于操作这样的调节系统的方法
- 支腿运动检测系统、支腿运动调节系统以及工程车辆
- 工程车辆支腿调节的控制系统、方法、装置及工程车辆