用于髋关节置换手术的机械臂辅助导航系统及手术系统
文献发布时间:2024-04-18 19:48:15
技术领域
本申请涉及医疗设备领域,具体涉及一种用于髋关节置换手术的机械臂辅助导航系统及手术系统。
背景技术
髋关节置换是将假体固定在人的正常骨质结构上来替代病变的关节,从而帮助患者的髋关节恢复正常功能。对于股骨头坏死、髋关节发育不良、退变性髋骨关节炎、类风湿性关节炎等病变,髋关节置换是最有效的方法之一。
髋关节置换的主要过程包括髋臼侧和股骨侧重建、假体植入等步骤。目前髋关节置换的模式有人工操作和机械臂辅助导航两种。其中,对于人工操作模式,缺点在于过于依赖操作者的经验,手术的精确性和稳定性因人而异;优点在于,能够根据操作者的经验,快速作出判断、及时作出方案调整,更加灵活。对于机械臂辅助导航模式,优点在于能够精确地进行手术部位的解剖和重建,手术精确性和稳定性较好;缺点在于,手术过程中需要大量的数据计算、时间长,灵活性较差。
发明内容
针对现有的机械臂辅助导航系统灵活性较差的问题,本申请提供了一种用于髋关节置换手术的机械臂辅助导航系统,为了髋关节置换手术提供了不同的导航模式,可以根据操作者的选择执行不同的导航模式,从而适应不同的手术需求。
所述机械臂辅助导航系统包括:
术前规划模块,用于根据采集的医学图像获得骨骼三维模型后,进行手术规划并确定股骨侧手术方案和髋臼侧手术方案;
交互选择模块,用于根据交互指令确定术中的导航模式;
术中导航模块,用于在所述导航模式下执行并调整所述股骨侧手术方案和髋臼侧手术方案。
根据本申请的一些实施例,所述术中导航模块还包括第一配准模块、第一执行模块、第二配准模块、第二执行模块,所述导航模式包括:
第一导航模式,通过第一配准模块对髋臼侧图像配准后,通过第一执行模块执行并调整所述髋臼侧手术方案;和/或
第二导航模式,通过第一配准模块和第二配准模块分别髋臼侧图像配准和股骨侧图像配准后,通过所述第一执行模块执行并调整所述髋臼侧手术方案,通过第二执行模块执行并调整所述股骨侧手术方案。
根据本申请的一些实施例,所述第一执行模块用于根据所述髋臼侧手术方案,通过机械臂执行髋臼侧重建,并在所述重建过程中根据测量的股骨前倾角和设定的联合前倾角调整髋臼前倾角,进而更新所述髋臼侧手术方案。
根据本申请的一些实施例,所述第一执行模块还用于根据所述髋臼侧手术方案,通过设置的立体安全边界限定所述机械臂的运动范围。
根据本申请的一些实施例,
当所述机械臂末端的工具接近所述立体安全边界时,所述第一执行模块通过所述机械臂向操作者反馈逐渐增大的机械臂操作力;或
当所述机械臂末端的工具超过所述立体安全边界时,所述第一执行模块自动切断末端工具电源。
根据本申请的一些实施例,所述第一执行模块还用于实时显示当前髋臼形态和/或髋臼假体位置信息。
根据本申请的一些实施例,所述第一执行模块还用于通过所述导航定位装置控制所述机械臂实时跟踪所述髋臼侧位置。
根据本申请的一些实施例,所述第二执行模块用于为操作者显示所述股骨侧手术方案,并在股骨截骨完成后测量股骨前倾角。
根据本申请的一些实施例,所述第一执行模块还用于根据所述第二执行模块获得的所述股骨前倾角和设定的联合前倾角来调整所述髋臼侧手术方案。
根据本申请的另一方面,还提供一种用于髋关节置换手术的机械臂辅助手术系统,包括:
导航定位装置;
上述机械臂辅助导航系统,与所述导航定位装置进行通信;
机械臂,在所述机械臂辅助导航系统的引导下辅助执行手术方案。
本申请提供的用于髋关节置换手术的机械臂辅助导航系统及手术系统,一方面为髋关节置换手术提供了不同的导航模式,可以根据操作者的选择执行不同的导航模式,从而适应不同的手术需求,应用更加灵活。另一方面,在术中执行模块通过测量股骨前倾角,进而调整髋臼前倾角,对手术方案进行调整,进一步提高了机械臂辅助导航系统的适用性,帮助改善机械臂辅助髋关节置换手术的手术效果。在髋臼重建过程中,通过建立安全边界,提升髋臼重建过程的安全性。
附图说明
为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图,而并不超出本申请要求保护的范围。
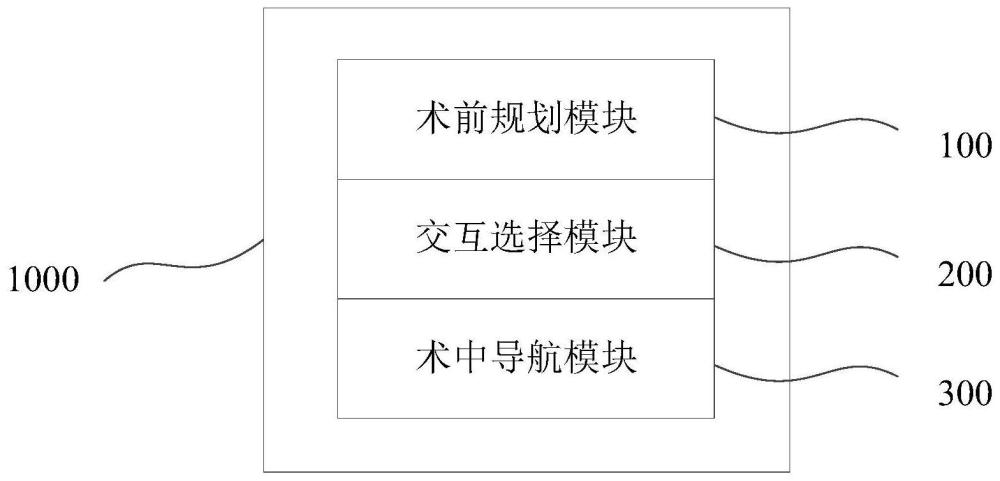
图1示出根据本申请第一示例实施例的机械臂辅助导航系统组成框图;
图2示出根据本申请示例实施例的术前规划模块组成框图;
图3示出根据本申请示例实施例的图像分割结果示意图;
图4示出根据本申请示例实施例的手术规划中的参考基准示意图;
图5示出根据本申请示例实施例的术中导航模块组成框图;
图6示出根据本申请示例实施例的执行过程中髋臼前倾角和髋臼外展角的规划示意图;
图7示出根据本申请示例实施例的第二执行模块提供的截骨标记线示意图;
图8示出根据本申请示例实施例的股骨髓腔重建示意图;
图9示出根据本申请示例实施例的机械臂辅助导航系统工作流程示意图。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
本申请的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述预定顺序。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。
在本文中提及“实施例”意味着,结合实施例描述的预定特征、结构或特性可以包含在本申请的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
在髋关节置换过程中,髋臼侧的重建和假体植入过程通常比较复杂,对手术的精度要求也很高。相对而言,股骨侧的重建和假体植入过程简单一些。在对手术精度没有太高要求的情况下,使用机械臂辅助导航对手术的结果没有明显的改进,相反,由于需要大量的数据计算,会导致手术时间延长。因此,为了使得机械臂辅助导航系统在髋关节置换手术中的应用更加灵活、在保证精度的前提下提高效率,本申请提供了一种具备不同导航模式、功能更加完备、操作更加简单,而且能够结合患者的术中数据进行手术方案调整的机械臂辅助导航系统,进一步提高了机械臂辅助导航系统的灵活性。
图1示出根据本申请第一示例实施例的机械臂辅助导航系统组成框图。
如图1所示,本申请提供的用于髋关节置换手术的机械臂辅助导航系统1000,包括术前规划模块100、交互选择模块200和术中导航模块300。其中,术前规划模块100可以用于根据采集的医学图像获得骨骼三维模型后,进行手术规划并确定股骨侧手术方案和髋臼侧手术方案。交互选择模块200用于根据交互指令来确定术中的导航模式。术中导航模块300用于在所述导航模式下执行并调整所述股骨侧手术方案和髋臼侧手术方案。
术前规划模块100可以包括数据导入子模块110、模型重建子模块120和手术规划子模块130,如图2所示。其中,数据导入子模块110用于对获取的患者医学影像数据进行检查,将符合手术标准的影像数据导入术前规划模块100。患者医学影像数据可以是包括骨盆、患侧和对侧股骨近端以及髋关节的三维CT影像或者MRI影像。
模型重建子模块120用于对导入的三维影像进行图像分割处理以及图像坐标系建立等。例如,导入患者三维影像数据后,可以根据冠状面、矢状面、横断面以及交互选择的感兴趣区域(ROI),分割出相应的图像。ROI中包括双侧骨盆、双侧股骨近端和双侧髋关节。选择ROI之后,可以根据设定的软组织和骨骼阈值,完成骨骼与软组织的自动分割,以及骨盆与股骨的自动分割。由此,可以从三维影像中分割出三维模型。图3示出了分割出的骨盆三维模型。
手术规划子模块130用于完成股骨侧手术方案规划和髋臼侧手术方案规划。完成分割后,建立相应的图像坐标系就完成了模型重建过程。例如,可以在分割的图像(参见图3)中在骨盆侧,由左侧髂前上棘11、右侧髂前上棘12和耻骨结节30,确定骨盆前平面,进而确定骨盆坐标系。骨盆坐标系建立后,将模型进行转正,便完成了模型重建。重建完成后,可以根据图像上的参考基准作为术前规划方案的参考值,进一步进行手术方案的规划。
图4示出了术前规划的参考基准示意图。
对于股骨侧的手术规划,参见图4,在重建的骨骼三维模型中,可以根据选择的股骨头中心、股骨近端髓腔中心、股骨远端髓腔中心、股骨髁中心等骨性标记点,确定股骨解剖轴和机械轴。股骨颈和股骨体连接处内下方的圆锥形隆起(小转子)可以作为手术方案规划过程中确定下肢长度变化的参考基准。股骨后髁线或通髁线可以作为手术方案规划过程中确定股骨前倾角的参考基准。例如,根据上述参考基准可以确定下肢长度和联合偏距。其中,下肢长度为定义为小转子到ASIS轴线(左侧髂前上棘11与右侧髂前上棘12的连线)的距离。联合偏距为骨盆中心线50到股骨解剖轴41或42的距离。此外,确定患侧和对侧的下肢长度与联合偏距后,在手术过程中还可以依据对侧的数据调整患者假体的型号、尺寸、位置和角度等。例如,手术过程中,根据术侧的测量数据,在保证联合偏距的条件下呢,调整假体型号等参数。规划假体位置和角度过程中,可以实时根据下肢长度和联合偏距与对侧参数、术前参数的变化值,来适当调整假体的型号、尺寸和位置。
在规划股骨柄参数时,以保证股骨柄与股骨髓腔内壁皮质骨表面贴合为前提,可以预先设定股骨前倾角。股骨前倾角为股骨颈假体轴线与通髁线(或后髁线)在垂直于股骨解剖轴的平面上的投影之间的夹角。股骨前倾角与髋臼前倾角共同确定了联合前倾角。根据人体的生理结果特征,手术规划方案应当保证联合前倾角处于合理范围之内。设定了股骨前倾角之后,可以在手术执行过程中,根据联合前倾角和测量的股骨前倾角,来调整髋臼前倾角,进而优化手术方案。
对于髋臼侧的手术规划,可以根据髋臼关节面上选择的若干标记点,通过拟合算法确定出髋臼旋转中心和髋臼半径,进而根据髋臼半径规划合适尺寸的髋臼假体,进而规划与之配套的髋臼内衬、股骨头假体和股骨柄假体。除了假体参数,还需要规划髋臼假体的置入角度,例如髋臼假体的外展角和前倾角,从而保证髋臼假体以设定的角度置入髋臼窝内。在规划过程中,可以通过根据髋臼假体与骨质的接触情况,在多个维度上调整髋臼假体至合适位置并获得最终的规划结果。
根据本申请的一些实施例,交互选择模块200可以提供不同的术中导航模式,以适应不同的手术需求。根据本申请的示例实施例,所述导航模式可以包括第一导航模式和/或第二导航模式,但本申请不限于此。根据本申请的一些实施例,第一导航模式为快速模式,仅为髋臼侧的手术执行提供机械臂辅助导航功能。参见图5,术中导航模块300包括第一配准模块310、第二配准模块320、第一执行模块330和第二执行模块340。
在第一导航模式下,通过第一配准模块310对髋臼侧图像配准后,通过第一执行模块330执行并调整所述髋臼侧手术方案。其中,髋臼侧图像配准过程为:通过导航定位装置,例如骨盆跟踪器、光学导航系统等,确定患者髋臼的空间位置;在骨盆跟踪器对于光学导航相机可见的情况下,可以通过光学探针在患者髋臼表面选取一系列骨性特征点,从而实现患者髋臼与髋臼三维模型之间的图像配准。配准完成后,髋臼三维模型空间与患者物理空间之间建立起映射关系,基于术前规划的髋臼侧手术方案,可以由第一执行模块330予以执行。
在执行过程中,首先可以通过机械臂执行髋臼侧重建。例如,根据患者的空间位置和姿态,将机械臂调整至合适位置并固定。在光学导航系统的引导下,机械臂运动至规划的空间位置并调整至合适的姿态,使得机械臂末端工具的轴线与髋臼假体规划中线重合。此时,可以启动末端工具进行髋臼重建。例如,启动髋臼锉进行髋臼磨锉等。
根据本申请的一些实施例,在通过机械臂执行髋臼侧重建的过程中,第一执行模块330可以根据髋臼侧手术方案,通过设置的立体安全边界限定机械臂的运动范围。例如,在髋臼磨锉过程中设定立体安全边界。导航定位装置实时检测髋臼锉的位姿;当机械臂末端的工具在立体安全边界内可以进行髋臼磨锉;当检测到机械臂末端的工具接近立体安全边界时,第一执行模块330通过机械臂向操作者反馈逐渐增大的机械臂操作力,使操作者明确感知立体安全边界;当检测到机械臂末端的工具超过立体安全边界时,第一执行模块330自动切断末端工具电源,以保证安全。根据本申请的一些实施例,在髋臼重建过程中,还可以实时显示当前髋臼形态,以及与规划方案之间存在的三个空间维度上的差异,从而对髋臼重建提供指导。
重建完成后,在臼杯假体置入时,第一执行模块310可以根据规划方案中确定的髋臼前倾角和髋臼外展角(参见图6),控制机械臂自动运行至规划位姿,并通过末端连接的臼杯打入器完成髋臼假体置入。根据申请的一些实施例,在置入髋臼假体时,第一执行模块330还可以实时显示髋臼假体位置信息,例如,臼杯打入深度信息,从而提供更加直观的显示。
根据本申请的示例实施例,第一执行模块330还可以在重建过程中根据测量的股骨前倾角和设定的联合前倾角调整髋臼前倾角,进而更新髋臼侧手术方案。例如,臼杯假体置入后,可以使用光学探针在臼杯假体表面采集一系列标记点。利用采集的数据可以进一步拟合平面,可以测量出臼杯假体的实际髋臼前倾角和髋臼外展角。依据实际髋臼前倾角和股骨侧重建过程中测量得出的股骨前倾角,可以判断联合前倾角是否满足生理结构要求。如果不符合,可以依据设定的联合前倾角,来进一步调整髋臼前倾角,进而更新髋臼侧手术方案。
在上髋臼重建和假体置入的执行过程中,第一执行模块330还可以通过导航定位装置根据骨盆跟踪器和机械臂跟踪器以及末端工具跟踪器确定机械臂的运动控制指令,从而控制机械臂实时跟踪髋臼侧的位置。例如,患者骨盆位置发生移动时,机械臂能够实时进行跟踪,从而保证正确的角度。
在第一导航模式下,股骨侧的手术方案可以由操作者来执行,更加快速、灵活。根据本申请的一些实施例,可以将股骨侧的手术规划方案进行显示,为操作者提供股骨重建和假体植入的执行指导。
根据本申请的一些实施例,第二导航模式为全功能模式,为髋臼侧和股骨侧的手术执行均提供机械臂辅助导航功能。在第二导航模式下,通过第一配准模块310和第二配准模块320分别进行髋臼侧图像配准和股骨侧图像配准后,通过上述第一执行模块330执行并调整髋臼侧手术方案,通过第二执行模块340执行并调整股骨侧手术方案。第二导航模式下的,髋臼侧图像配准和手术方案的执行与第一导航模式相同,不再赘述。下面,将详细介绍第二导航模式下的股骨侧手术方案的执行。
首先,通过第二配准模块320进行股骨图像配准。例如,可以利用股骨近端固定的跟踪器与光学导航系统来确定患者的股骨空间位置。在股骨跟踪器对于光学导航系统可见的情况下,利用光学探针在患者股骨表面选取骨性特征点,便可以实现患者股骨与术前三维影像之间配准。完成图像配准后,股骨三维模型与术中患者物理空间建立映射关系,导入术前规划的手术方案后,便可以用于执行。
在股骨重建过程中,第二执行模块340可以为操作者显示股骨侧手术方案,例如提供股骨颈截骨面信息。在光学探针和股骨跟踪器对于光学导航系统同时可见的情况下,操作者可以使用光学探针在患者股骨颈标记规划的截骨位置(如图7所示)。操作者可以根据第二执行模块340提供的截骨线标记进行截骨,并依次增加髓腔锉尺寸进行股骨扩髓,直至规划的尺寸(参见图8)。
髓腔重建完成后,可以通过第二执行模块340测量出股骨前倾角。例如,使股骨前倾角测量工具末端的套筒与股骨颈轴端匹配,并保证轴线重合;另一端配备的光学跟踪器,在光学导航系统的识别下,结合股骨跟踪器的位置,获取股骨前倾角。测量得到的股骨前倾角与规划的结果存在偏差时,第一执行模块330可以根据测量的股骨前倾角来调整髋臼前倾角,从而保证联合前倾角。
根据本申请的一些实施例,在股骨假体和髋臼假体置入后,本申请提供的机械臂辅助导航系统还可以测量患者术后骨性特征标记点,得到患者术后腿长和联合偏距的变化,包含相对于术前的变化,以及相对于对侧的变化,从而为操作者提供判断依据。
图9示出根据本申请示例实施例的机械臂辅助导航系统工作流程示意图。
本申请提供的全髋关节置换手术操作执行系统的使用过程如图9所示,包括以下步骤:
步骤S910,患者影像采集。例如,可以使用CT设备或者磁共振成像采集患者股骨和髋关节处骨盆的影像。
步骤S920,图像分割与重建。根据获取的患者股骨和髋关节处骨盆的影像,可以通过图像处理算法分割出股骨和骨盆的图像并重建出股骨三维模型和骨盆三维模型。
步骤S930,术前方案规划。基于重建的股骨三维模型和骨盆三维模型,进行手术规划,确定包含假体型号、尺寸、位置等信息的手术方案。
步骤S940,手术方案导入,包括导入术前规划生成的患者手术方案。
步骤S950,导航模式选择,包括选择第一导航模式或第二导航模式。
步骤S960,在第一导航模式下,通过机械臂导航辅助功能执行髋臼侧图像配准、重建以及手术方案的执行和调整;为操作者提供股骨侧手术规划方案进行执行;
步骤S970,在第二导航模式下,通过导航辅助功能执行髋臼侧图像配准和股骨侧配准,利用机械臂执行重建和髋臼侧假体置入方案;由手持下的工具执行股骨侧重建和假体置入。
根据本申请的另一方面,还提供一种用于髋关节置换手术的机械臂辅助手术系统,包括上述机械臂辅助导航系统、导航定位装置和机械臂。机械臂辅助导航系统与导航定位装置进行通信,获取患者手术部位、机械臂、手术末端工具的实际空间位置;机械臂在机械臂辅助导航系统的引导下辅助执行手术方案。
根据本申请的一些实施例,机械臂辅助导航系统可以包括上位控制器、人机交互装置。导航定位装置可以包括导航相机、患者跟踪器、机械臂末端跟踪器、末端工具跟踪器、光学探针。上位控制器分别与人机交互装置、机械臂及导航相机通信连接,接收人机交互装置及导航相机传送的信息,并向人机交互装置、机械臂及导航相机发送相关信息或指令。人机交互装置可以为操作者提供导航模式选择的交互界面,并获取操作者输入的交互指令。
上位控制器还与光学探针、机械臂末端跟踪器、患者跟踪器、末端工具跟踪器等通信连接,例如控制这些部件的启用等。患者跟踪器可以包括髋臼侧跟踪器和股骨侧跟踪器,分别固定于患者骨盆和股骨,用于术中确定患者髋臼和股骨的空间位置。
机械臂末端跟踪器,安装在机械臂末端,用于确定机械臂末端的空间位置。末端工具跟踪器可以包括髋臼锉跟踪器和髋臼杯假体置入跟踪器,分别固定于髋臼锉连接杆和髋臼杯假体打入器连接杆上,用于确定髋臼锉和髋臼杯假体的空间位置。光学探针包括采集患者骨性标记点的探针和测量股骨假体前倾角的探针。
导航相机接收机械臂末端跟踪器、患者跟踪器、末端工具跟踪器的信号,在同一空间坐标系下确定机械臂、末端工具和患者骨盆及股骨的相对空间位置关系。在患者骨盆、股骨机械臂及末端工具空间位置关系确定的前提下,导航相机接收光学探针的信号,完成患者髋臼和股骨骨性标记点采集工作,接收光学探针的信号,完成股骨假体前倾角采集工作。
本申请提供的用于髋关节置换手术的机械臂辅助导航系统及手术系统,本申请提供的用于髋关节置换手术的机械臂辅助导航系统及手术系统,一方面为髋关节置换手术提供了不同的导航模式,可以根据操作者的选择执行不同的导航模式,从而适应不同的手术需求,应用更加灵活。另一方面,在术中执行模块通过测量股骨前倾角,进而调整髋臼前倾角,对手术方案进行调整,进一步提高了机械臂辅助导航系统的适用性,帮助改善机械臂辅助髋关节置换手术的手术效果。在髋臼重建过程中,通过建立安全边界,提升髋臼重建过程的安全性。
以上对本申请实施例进行了详细介绍,本文中应用了具体个例对本申请的原理及实施方式进行了阐述,以上实施例的说明仅用于帮助理解本申请的方法及其核心思想。同时,本领域技术人员依据本申请的思想,基于本申请的具体实施方式及应用范围上做出的改变或变形之处,都属于本申请保护的范围。综上所述,本说明书内容不应理解为对本申请的限制。
- 一种机器人辅助髋关节置换手术导航系统
- 基于快速配准的机械臂辅助全髋关节置换手术