一种基于核方法的触觉模态识别方法
文献发布时间:2023-06-19 10:38:35
技术领域
本发明属于机器人智能触觉技术领域,具体涉及一种基于核方法的触觉模态识别方法。
背景技术
在人机交互过程中,机器人能及时地对人类传达的信息进行感知和互动是一项重要的能力,尤其是机器人能对从外界来的触觉信号进行正确地感知和识别是尤为重要的。机器人智能触觉的研究逐渐被人重视,而关于触觉感知主要涉及三个技术问题:分别是触觉信号的高维度,触觉感知单元复杂的张量形态,以及不同触觉时间序列样本之间的偏差问题。实际上,除此以外,在形形色色的触觉识别任务中,还面临着各种各样的挑战,例如触觉测量之间失准普遍存在,触觉测量的持续时间不相等,触觉测量开始时间点不一致等等。
众所周知,触觉是人感知外部世界变化一项非常重要的能力,但是在传统的工业机器人中,除非是执行某些特别的活动,一般不会赋予机器人灵敏的触觉传感器。可是,近几年来机器人智能触觉领域越来越引起人们的广泛关注,人机交互当中的触觉交互也慢慢变得炙手可热,在如今的人机交互场景下,触觉已经成为了机器人与人类互动的基本能力。例如,许多仿生机器人在不同的行业也得到广泛应用。
相关技术公开了一种基于阵列式触觉传感器的情感识别装置及方法,阵列式触觉传感器放置在载体上并和微控制器连接,用于采集参与者执行动作的压力值数据并发送给微控制器;微控制器与上位机连接,用于控制阵列式触觉传感器工作,接收阵列式触觉传感器采集的压力值数据并保存,然后发送到上位机;上位机对从微控制器接收到的压力值数据进行保存,经过分析处理后实时显示情感识别的结果。
相关技术还公开了一种基于触觉纹理特征的纹理图像跨模态检索方法,依次包括触觉纹理训练样本材质选取、触觉纹理训练数据集和纹理图像训练数据集的建立、触觉加速度的特征提取等。它利用采集纹理表面的摩擦振动信号作为纹理表面的触觉特征从纹理图像检索库中检索出与被检索表面最相似的纹理表面图像,即实现基于触觉特征的跨模态物体材质检索。
然而,相关技术从分类的角度上看,鲜有将触觉传感器去识别触觉方式的研究,某些考虑的分类是通过使用触觉传感器感受触碰,判断本次触碰带有的情感等等;从使用的分类器上看,学习分类器往往都是使用简单传统的分类器,如将提取的主要特征在支持向量机(SVM)、最邻近节点算法(KNN)等,相关技术的分类学习器过于简单,并且学习效率不高,分类准确度也不高,并且比较难有显著的提高。
发明内容
为了解决现有技术中的问题,本发明提出一种基于核方法的触觉模态识别方法,采用复合核函数的分类方法,具备更高的学习效率,更高的分类准确度。
为了实现以上目的,本发明提供了一种基于核方法的触觉模态识别方法,包括:
1)获取张量触觉信号的数据集;
2)进行降维处理;
3)建立基于奇异值分解的核函数;
4)建立全局对齐核函数;
5)基于奇异值分解的核函数和全局对齐核函数,建立理想正则化的复合核函数;
6)将理想正则化的复合核函数和支持向量机进行融合,得到基于张量触觉信号的核分类学习器,即可对张量触觉信号进行触觉模态识别。
进一步地,所述步骤2)采用降采样和稀疏主成分分析进行降维处理。
进一步地,所述步骤3)包括:
3.1)对于触觉张量信号
3.2)对于张量
其中,||·||
3.3)基于奇异值分解的核函数为:
其中,N为维数。
进一步地,所述步骤4)对于张量
其中,
进一步地,所述步骤5)理想正则化的复合核函数表示为:
K
其中,μ是平衡基于奇异值分解的核函数和全局对齐核函数的权衡因子。
更进一步地,所述理想正则化的复合核函数融入标签信息,则理想正则化的复合核函数表示为:
其中,K为核矩阵,
通过求解,得到最优的K值为:
其中,⊙表示两个模型元素层面上的乘积。
更进一步地,所述理想正则化的复合核函数进一步泛化,出现新的样本
其中,N
进一步地,所述步骤6)包括:给定训练集
其中,α
与现有技术相比,本发明方法基于理想正则化的复合核函数,具备了更高的分类准确性,相比许多传统的学习方法均有不凡的表现,现有技术的分类学习器过于简单,并且学习效率不高,分类准确度也不高,并且比较难有显著的提高,而复合核函数的分类方法提供了一种融合创造新分类学习器的思路,使用了融合核的思想,同时实验也表明,复合核函数具备更高的学习效率,更高的分类准确度,研究前景更加明朗,有望在人工智能和机器学习领域有更大的发展。
附图说明
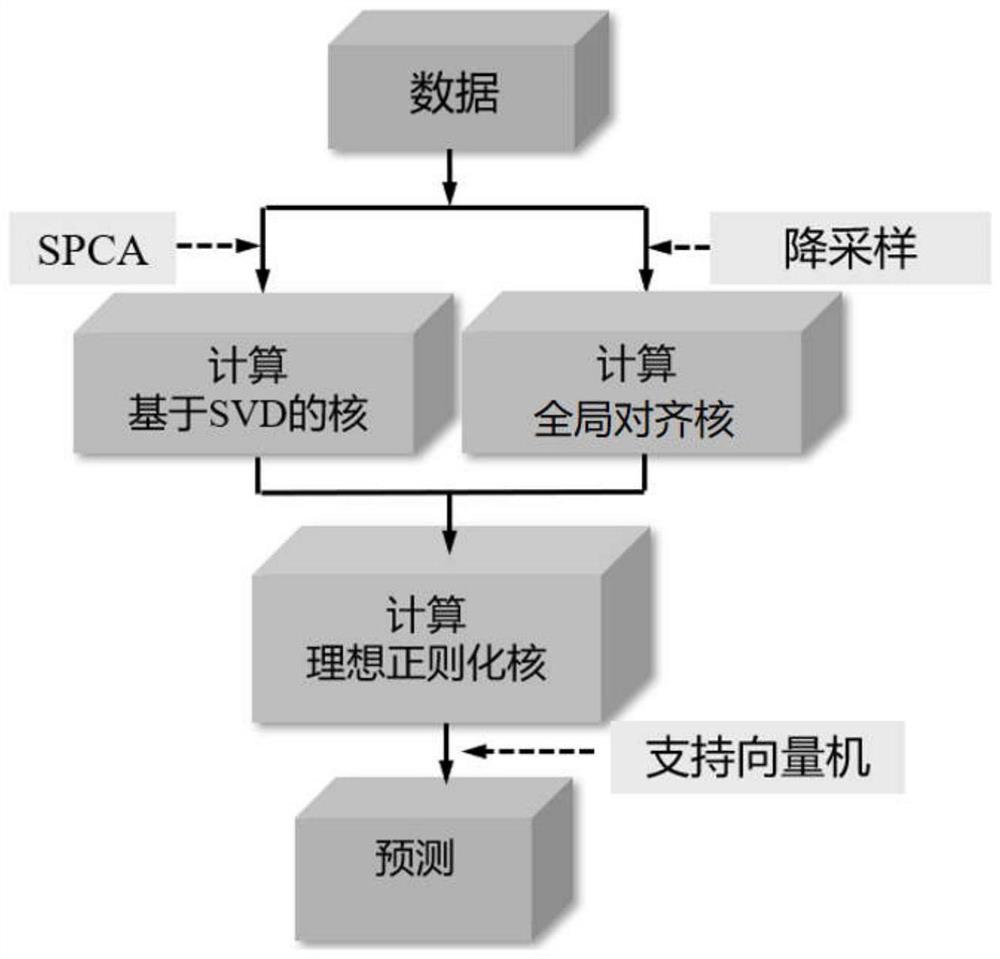
图1为本发明的方法流程图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。因此,以下对本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明提供了一种基于核方法的触觉模态识别方法,可以应用于需要高敏感度的机器人触觉的人机交互场景中,机器人可以快速地识别人的触觉信号,并作出回应,在智能机器人的拟人化方向有较大的想象空间和发展潜力。
参见图1,本发明包括:
1)获取张量触觉信号的数据集;
2)进行降维处理;
3)建立基于奇异值分解的核函数;
4)建立全局对齐核函数;
5)基于奇异值分解的核函数和全局对齐核函数,建立理想正则化的复合核函数;
6)将理想正则化的复合核函数和支持向量机进行融合,得到基于张量触觉信号的核分类学习器,即可对张量触觉信号进行触觉模态识别。
具体包括以下步骤:
1)首先通过公开的网络渠道收集了张量触觉信号的数据集;
2)采用降采样和稀疏主成分分析(SPCA)对张量触觉信号的数据集进行降维处理;触觉信号本质上是高维的,由于维度灾难,将原始的触觉信号馈送到经典的机器学习方法中是不切实际的,本发明方法使用两种技术来缓解高维问题,均易于实现且计算复杂度极低,同时可以保留数据最大方差的子空间;
3)建立基于奇异值分解(SVD)的核函数:
3.1)对于触觉张量信号
3.2)对于张量
其中,||·||
3.3)基于奇异值分解的核函数为:
其中,N为维数;
4)建立全局对齐核函数:
对于张量
其中,
5)建立理想正则化的复合核函数:
5.1)一个复合核函数是融合了多个核函数而成的核函数,目的是为了利用各个核函数的判别功能,具体来说,一个复合的核函数应该是给予组成它的子核函数相应的权重,本发明中的理想正则化的复合核函数是融合了基于奇异值分解(SVD)的核函数和全局对齐核函数,理想正则化的复合核函数表示如下:
其中,μ是平衡基于奇异值分解的核函数和全局对齐核函数的权衡因子;
5.2)通常传统的复合核方法不会将标签信息考虑在内,因此为了学习得到一个满意的复合核函数,本发明将标签信息融入了理想正则化的复合核函数中,理想正则化的复合核函数表示如下:
其中,K为核矩阵,
通过求解,得到最优的K值为:
其中,⊙表示两个模型元素层面上的乘积;
5.3)理想正则化的复合核函数进一步泛化,出现新的样本
其中,N
6)将理想正则化的复合核函数和支持向量机进行融合,得到基于张量触觉信号的核分类学习器,即可对张量触觉信号进行触觉模态识别:首先给定训练集
其中,α
本发明首先通过公开的网络渠道收集了张量触觉信号的数据集,结合稀疏主成分分析(SPCA)和降采样方法,将高维度的张量数据进行降维处理;采用全局对齐核函数来解决触觉时间序列的时间错位问题,保证了触觉时间的统一可以提高分类准确率,并整合了基于奇异值分解(SVD)的内核的优势和全局对齐核函数创造出了理想正则化的复合核函数法,同时将训练集的标签信息也考虑在其中,本发明将张量触觉信号进行降维处理,简化触觉感知单元复杂的张量信号,同时解决触觉时间存在偏差的问题,并且提高系统识别来自外界的触觉方式的分类正确率,本发明涉及到的分类器可以有三种:基于奇异值分解(SVD)的核函数法、全局对齐核函数法,以及理想正则化的复合核函数法,将上述三种方法融合支持向量机,便得到了三种分类学习器,同时这三类分类学习器的正确率均有良好表现。
本发明提供了一种开放性的思路,提出了一种将各种核函数进行融合,创造出一种理想正则化的复合核函数的方法,可以更加正确地对触觉方式进行分类,提高了分类的准确度。因此,将基于核的方法和各种分类学习方法进行融合,就有可能会在人机智能交互领域创造出某些新的创造。
本发明在特征提取阶段综合使用稀疏主成分分析(SPCA)和降采样两种方法来进行特征提取,将张量触觉信号复杂的高维度进行降维处理,避开了维度灾难,更高效地提取数据,简化了计算步骤,降低了后续训练模型的复杂度,也提高了分类效率。
本发明最终得出的理想正则化的复合核函数方法与大多数的分类学习方法都进行了比较,并且在最终的分类准确度上,该分类学习器的表现最佳,分类准确度最高,较为明显地高于其他的分类学习器。原因在于它不仅融合了子核函数的判别能力,并且也将训练集的标签信息考虑入内。
本发明经过了实验、模拟,证明了它的正确性。实验中所使用到的训练集数据是公开的数据集,所以训练集数据可以通过网络途径查询到。通过大量的数据去训练本发明,使得本发明具备了较强的触觉方式识别能力,并且在实验中也对比了大多数的分类学习器的测试结果,可以明显地发现本发明的分类学习效果要优于其他的分类学习器,其分类准确度也高于其他方法,相比之前的分类结果有了较好的提升,所以,证明了本发明方法是可行的。应用于需要高敏感度的机器人触觉的人机交互场景中,机器人可以快速地识别人的触觉信号,并作出回应,在智能机器人的拟人化方向有较大的想象空间和发展潜力。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于核方法的触觉模态识别方法
- 基于多类核典型相关分析的多模态情感特征识别方法