一种全断面电缆通道检测机器人
文献发布时间:2023-06-19 18:29:06
技术领域
本发明涉及一种针对不同截面形状的电缆通道进行全断面扫描检测并建立三维模型的设备,属于地下通道结构检测领域。
背景技术
近年来,城镇化进程加快导致用电负荷增加,电缆通道作为电缆的地下载体能有效释放地上空间、保证输送电的安全性。但许多在役电缆通道均为上世纪建设,具有一定的安全隐患,对电缆通道结构进行检测评估意义重大。电缆通道通常处于城区软弱地层中,周边环境较复杂,如何对电缆通道结构进行高效准确的检测成为一个急需解决的问题。目前在电缆通道的结构检测中,通常由专业检测人员携带结构检测设备实地检测,但运营的电缆通道中架设大量线缆,情况复杂,人工检测手段不仅效率低、不够精确,同时对检测人员也具有一定经验要求,具有一定的安全隐患。
发明内容
本发明的目的在于提供一种全断面电缆通道检测机器人,可以合理避开通道内的线缆和支架对电缆通道结构进行全方位检测,并根据定位模块规避通道内支架及线缆,数据实时传输到3D建模分析模块形成电缆通道3D损伤模型,为电缆通道后续结构评价及修复方案制定提供强有力依据。
为实现上述目的,本发明提供如下技术方案:一种全断面电缆通道检测机器人,包括机器人主体、储存模块、远程控制模块、供电模块和行进模块,其特征在于,还包括定位模块、机械臂、检测模块和3D建模分析模块;所述定位模块与远程控制模块通信连接,同时定位模块与储存模块通信连接,定位模块通过万向节一安装在机器人主体上方,用于实时采集机器人的位置信息和实时拍摄电缆通道内部场景;所述机械臂与远程控制模块连接,机械臂为可伸缩的机械臂,机械臂通过万向节二安装在机器人主体上,机械臂的端部连接有用于与电缆通道内壁滑动接触的滑轮;所述检测模块安装在机械臂的端部,检测模块分别与远程控制模块、储存模块通信连接,检测模块包括裂缝扫描仪、钢筋扫描仪、超声探伤仪和超声测强仪;所述3D建模分析模块分别与远程控制模块、储存模块连接,3D建模分析模块用于调用储存模块内部的数据进行建模,形成电缆通道3D损伤模型并对危险点进行标记。
进一步,所述定位模块包括高清摄像头和微型全站仪。
进一步,所述机械臂由至少两节机械臂节串接组成,每节机械臂节由相互套接的外连杆和内连杆构成伸缩结构,相邻机械臂节之间通过环形伺服电机连接,相邻两节机械臂节的外连杆分别与环形伺服电机的内外转子连接;内连杆作为驱动气缸活塞杆,外连杆作为驱动气缸的缸筒,通过向外连杆内注入压缩空气驱动内连杆伸缩;驱动气缸和环形伺服电机均与远程控制模块连接。工作过程中内连杆通过压缩空气驱动可实现伸长及收缩,将检测模块送入待检测区域,待机状态下内连杆自动缩回至外连杆内。
进一步,所述检测模块通过检测模块连接构件安装在机械臂上,检测模块连接构件包括连接在机械臂上的承台,承台上设置有用于连接检测模块的连接槽。
进一步,所述承台上连接有可伸缩的滑轮支座,所述滑轮安装在滑轮支座上。
进一步,所述行进模块设置在机器人主体底部,行进模块由一对驱动轮以及一个从动轮组成,驱动轮通过轮轴电机驱动回转,驱动轮的轮轴通过气缸与机器人主体连接,从动轮通过气缸与机器人主体底部连接,轮轴电机和气缸均与远程控制模块连接;驱动轮通过气缸实现机器人升降,从动轮通过气缸实现伸缩,从动轮伸出后用于支撑机器人,通过轮轴电机回转驱动机器人行进。
通过上述设计方案,本发明可以带来如下有益效果:
1、本发明提供的一种全断面电缆通道检测机器人,采用远程操控自动化检测。仅需要1名操作人员就能实现电缆通道的全断面、长距离、多项目的检测,操作简单便捷,有效降低人工成本。
2、本发明提供的一种全断面电缆通道检测机器人安全性高。钢筋扫描、裂缝扫描以及激光测距等结构检测功能的操作均可由远程控制模块控制机械臂完成,无需操作人员进入电缆隧道,能有效避免电缆通道内电缆破损及支架掉落等风险。
3、本发明提供的一种全断面电缆通道检测机器人能对电缆通道进行无死角检测。连接检测模块的机械臂可自由伸缩并通过万向节连接在机器人主体上,能有效规避通道内支架及线缆对死角进行结构检测。
4、本发明提供的一种全断面电缆通道检测机器人能实时建立整个电缆通道的缺陷网络。微型全站仪对设备进行实时定位,检测模块将检测的缺陷传输到存储模块中,3D建模分析模块在已建立的模型内定位并添加缺陷。
5、本发明提供的一种全断面电缆通道检测机器人能根据工程需要更换检测模块。可转动伸缩的机械臂及其上连接的检测模块可进行拆卸,能实现多项目同时检测,极大提高了检测效率。
附图说明
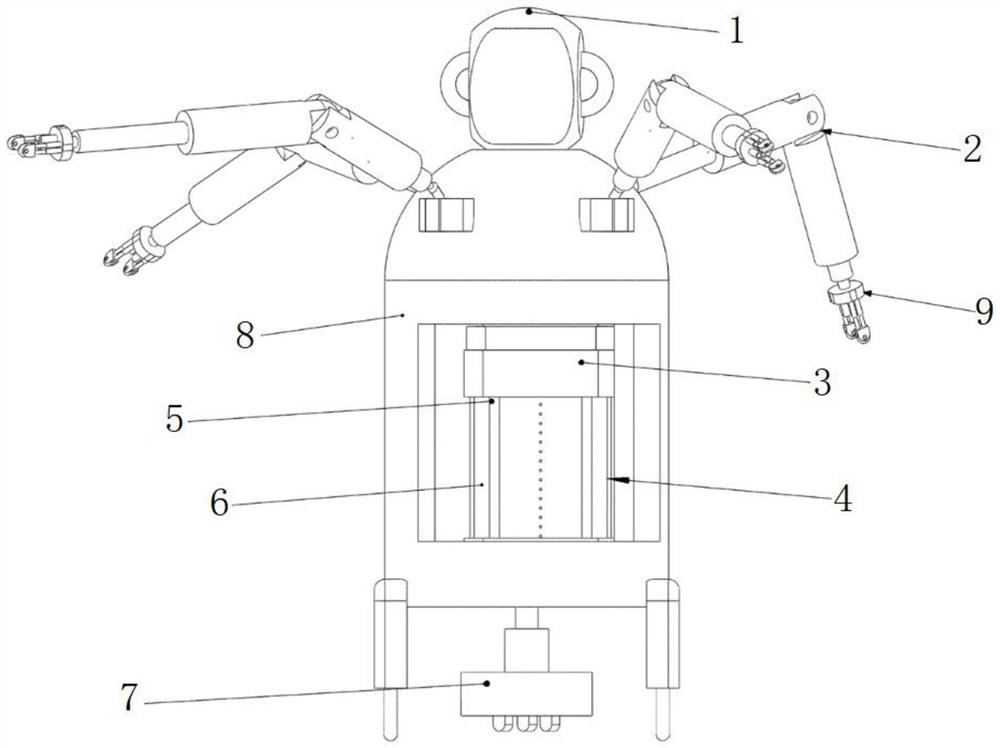
图1为本发明实施例提供的全断面电缆通道检测机器人的主视图;
图2为本发明实施例中定位模块模型图;
图3为本发明实施例中机械臂模型图一;
图4为本发明实施例中机械臂模型图二;
图5为本发明实施例中机械臂模型图三;
图5为本发明实施例全断面电缆通道检测机器人的主体结构模型图。
图中:1-定位模块、2-机械臂、3-储存模块、4-远程控制模块、5-3D建模分析模块、6-供电模块、7-行进模块、8-机器人主体、9-检测模块连接构件、10-高清摄像头、11-微型全站仪、12-万向节一、13-万向节二、14-外连杆、15-内连杆、16-环形伺服电机、17-滑轮、18-滑轮支座、19-连接槽、20-承台。
具体实施方式
为了更清楚地说明本发明,下面结合优选实施例和附图对本发明做进一步的说明。本领域技术人员应当理解,下面所具体描述的内容是说明性的而非限制性的,不应以此限制本发明的保护范围。除非另作定义,此处使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。为了避免混淆本发明的实质,公知的方法、过程、流程、元件和电路并没有详细叙述。
本发明提出了一种全断面电缆通道检测机器人,如图1所示,包括定位模块1、机械臂2、储存模块3、远程控制模块4、3D建模分析模块5、供电模块6、行进模块7、机器人主体8和检测模块。机械臂2的端部安装有检测模块连接构件9,检测模块连接构件9可连接裂缝扫描仪、钢筋扫描仪、超声探伤仪和超声测强仪等检测模块实现检测功能。
本发明提出了一种全断面电缆通道检测机器人可穿过电缆通道内的复杂地形,所述机器人作业时,远程控制模块4在接收到定位模块1实时传输图像及坐标后,机器人在行进模块7的带动下移动。行进到指定位置后,可自由转动的机械臂2调整到待检测方位,机械臂2通过伸缩控制末端连接的检测模块对指定部位进行检测,检测数据实时传输到储存模块3,3D建模分析模块5调用储存模块3内部数据对储存模块3内检测数据及坐标进行建模,形成电缆通道3D损伤模型并对危险点进行标记。
所述定位模块1通过万向节一12安装在机器人主体8上方,如图2所示,定位模块1包括高清摄像头10和微型全站仪11,定位模块1的作用有:①实时拍摄电缆通道内部场景,便于操作人员对所述机器人进行控制;②机器人主体8在电缆通道实现精确定位,同时也可对检测模块进行精确定位,为电缆通道3D损伤模型的建立提供数据;③可转动的定位模块1,实现360°拍摄及测距。
如图3、图4和图5所示,机械臂2通过万向节二13安装在机器人主体8上,通过旋转机械臂2将机械臂2送至需要检测方位,机械臂2的端部连接有用于与电缆通道内壁滑动接触的滑轮17;所述机械臂2由至少两节机械臂节串接组成,每节机械臂节由相互套接的外连杆14和内连杆15构成伸缩结构,相邻机械臂节之间通过环形伺服电机16连接,相邻两节机械臂节的外连杆14分别与环形伺服电机16的内外转子连接;内连杆15作为驱动气缸的活塞杆,外连杆14作为驱动气缸的缸筒,通过向外连杆14内注入压缩空气驱动内连杆15伸缩;驱动气缸和环形伺服电机均与远程控制模块连接。
所述检测模块通过检测模块连接构件9安装在机械臂2上,检测模块连接构件9包括连接在机械臂2上的承台20,承台20上设置有用于连接检测模块的连接槽19。所述承台20上连接有可伸缩的滑轮支座18,滑轮支座18为可伸缩结构,所述滑轮17安装在滑轮支座18上。本发明中万向节二13连接机器人主体8和可伸缩的机械臂2,可使机械臂2实现全方位转动,两节机械臂节通过环形伺服电机16连接,机械臂2可自由伸缩,实现长距离精准控制。承台20连接检测模块,检测模块可根据检测项目的需要进行更换,本实施例中具有四条机械臂2,四条机械臂2最多可连接四种不同的检测模块,设备进入电缆通道工作一次最多可实现四种项目检测,承台20通过连接槽19连接检测模块,可连接的检测模块有:①钢筋扫描仪,可对电缆通道内钢筋直径、间距、位置,保护层厚度进行检测;②裂缝扫描仪,对电缆通道表面裂缝深度、宽度进行测定;③超声探伤仪,可以利用声波对电缆通道内部裂缝、混凝土劣化等缺陷进行探查:④超声测强仪,利用超声波测定电缆通道混凝土强度。
所述滑轮17通过可伸缩的滑轮支座18与承台20连接,滑轮支座18由伸缩杆和用于连接滑轮的滑轮安装部组成,可伸缩的滑轮支座18会根据测定模块到电缆通道内壁距离伸缩,保证测定过程中滑轮17与电缆通道内壁滑动接触,远程控制模块4通过控制机械臂2实现对滑轮17滑动方向以及距离的操作。电缆通道内壁与滑轮17滑动接触具有如下优点:①滑动接触有效减少摩擦,能极大地避免电缆通道内壁粗糙对检测模块的损伤;②提高检测效率,滑轮17与电缆通道内壁接触使远程操作更加精确直观。
如图6所示,机器人主体8安装有储存模块3、远程控制模块4、3D建模分析模块5和供电模块6,储存模块3、远程控制模块4、3D建模分析模块5和供电模块6就单体而言,其实现各自应实现功能的具体结构在现有技术中已经存在,进行工作处理时所涉及的协议、软件或程序也在现有技术中已经存在,本领域人员已充分知晓。储存模块3内储存有定位模块1实时传输的图像数据以及地理位置信息,同时分区储存各个检测模块实时检测的数据;远程控制模块4可以根据定位模块1传输回来的图像数据对机械臂2进行操控,同时还能根据储存模块3内位置信息对行进模块7进行障碍规避把控;3D建模分析模块5将储存模块3中位置信息以及检测结果进行匹配,实现检测以及建模同时进行,在检测的同时对上一节电缆通道进行建模评判,为后续修复提供理论依据,极大提高电缆通道检测修复的效率,具有较高经济效益;供电模块6内有可拆卸充电锂电池,锂电池重量轻、能量密度大、能实现多次循环充放电,供电模块6为整个设备的运行提供动力支撑,电池容量设计工作时间为一个工作日。
所述行进模块7设置在机器人主体8底部,行进模块7由一对驱动轮以及一个从动轮组成,驱动轮通过轮轴电机驱动回转,驱动轮的轮轴通过气缸与机器人主体8连接,从动轮通过气缸与机器人主体8底部连接,轮轴电机和气缸均与远程控制模块4连接;从动轮通过气缸实现伸缩,通过轮轴电机回转驱动机器人行进,驱动轮可通过地面不大的障碍物时,当遇到较大障碍物时,从动轮伸出,从动轮单独支撑机器人,避开较大障碍物,并实现转向,所有操作均由远程控制模块4调控。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。