多菌种协同作用的水环境治理装置及方法
文献发布时间:2023-06-19 19:33:46
技术领域
本发明涉及一种污水处理装置,具体涉及多菌种协同作用的水环境治理装置及方法。
背景技术
目前国内外使用最多的微生物净化技术是投菌技术和生物膜技术等。投菌技术是直接向污染水体中接入外源的污染降解菌,然后利用投加的微生物激活水体中原本存在的可以自净的、但被抑制而不能发挥其功效的微生物,并通过它们的迅速增殖,强有力地钳制有害微生物的生长和活动,从而消除水域中的有机污染及水体的富营养化。
固定化微生物技术是通过一定的包埋方式将生化处理菌种固定在一个适宜其繁殖、生长的微环境中的技术,从而达到有效降解养殖废水中某些特定污染物的目的。固定化微生物技术对污染物去除是通过固定化载体和微生物共同作用的结果。部分有机物能够吸附在固定化的载体上,通过各方面的因素保持微生物具有较好的活性,微生物便能去除污水中的污染物,并可以转化成供自身新陈代谢的能源;另外一部分污染物可以进入微生物细胞的内部被酶降解。由于大量的污染物附着在固定化载体上,载体内外容易形成浓度差,使浓度高的容易向浓度低的扩散,从而促进污染物的降解。
固定化微生物技术用于污水处理,能有针对性地对有效微生物菌群进行固定,可选择性地提高泥龄,保持有效微生物菌种的活性,提高污水的处理效率。同时,微生物人工强化固定化处理效率高且能选择性地固定一些特殊菌种。但是目前在污水处理时,不能同时对不同的污染物进行处理,且处理效果较差。
发明内容
本发明的一个目的在于提供多菌种协同作用的水环境治理装置及方法,通过将不同微生物的固定架设置在菌种转盘上,能够同时对不同的污染物进行处理,提高使用效率。
该目的采用以下技术方案实现:本装置包括船体、固定架和用于固定微生物的微生物载体,所述微生物载体固定在固定架上,为了能够同时处理不同的污染物,本装置在船体上设置多个菌种转盘,菌种转盘上设置有若干分隔板,若干分隔板将菌种转盘均分为至少两个用于放置固定架的放置区,所述固定架与菌种转盘的放置区可拆卸连接。每个菌种转盘上可放置多个不同的固定架,每个固定架上的微生物用于处理不同的污染物,例如一个固定架可以为处理有机污染物的微生物,还可以为处理重金属离子污染物的微生物,还可以为处理含氮污染物的微生物。因此船体与菌种转盘上多个固定架的相结合,能够使本装置同时处理多种污染物,提高处理效率。
在此基础上,本发明人将每个菌种转盘上设置一个旋转杆,旋转杆能够带动其上的菌种转盘以旋转杆所在直线为轴线旋转,通过旋转杆旋转带动菌种转盘旋转,当本装置的菌种转盘完全位于水面下方时,旋转杆带动菌种转盘旋转,能够在水面下增加水的流动,通过增加水的流动方向和速率,对微生物载体固定架上的微生物不断碰撞,提高微生物的释放效率。当本装置的菌种转盘部分位于水面下方时,旋转杆带动菌种转盘旋转,使不同的固定架位于水面下方,这样能够有针对性的对污水的污染物进行处理,已达到更高的污水处理效果。
在上述结构的基础上,本装置的船体上设置有用于推进船体移动的螺旋桨,所述螺旋桨的旋转面与菌种转盘的旋转面平行且相对,螺旋桨通过旋转推动船体移动,螺旋桨旋转使水流流动到菌种转盘上,对其进行冲击,进一步的提高微生物的释放,提高使用效率。同时,优选的菌种转盘的轴线与旋转杆所在直线重合,船体放置在水上时,旋转杆位于水面上,在本装置中,位于水面上指旋转杆水平时,旋转杆所在直线与水面重合,这样当需要某种微生物时,将对应的固定架旋转到水面下方使其位于水中,以达到较好的污水处理效果。更优的,螺旋桨位于旋转杆的下方。当旋转杆旋转使所需的固定架位于水面下时,螺旋桨正对位于水面下的固定架旋转,提高使用效率。
更进一步的,船体上设置有污水检测装置。污水检测装置用于检测污水中含氮污染物的含量,船体上设置有机物检测装置、重金属检测装置。根据检测的结果调整位于水面下的固定架,能更有针对性的调整所需的微生物,更好的治理该区域的水环境。
具体的,多菌种协同作用的水环境治理方法,包括:
将若干固定架分别放置在若干放置区中,固定架上的微生物用于处理有机污染物或重金属离子污染物或含氮污染物;
检测装置检测污水中有机污染物、重金属离子污染物、含氮污染物的含量;
控制器根据有机污染物、重金属离子污染物、含氮污染物的含量控制旋转杆旋转,使不同的固定架及其上的微生物位于水面下方。
包括三个旋转杆,三个旋转杆上均设置有一个菌种转盘,三个菌种转盘分别为用于处理有机污染物的第一转盘、用于处理重金属离子污染物的第二转盘、用于处理含氮污染物的第三转盘,第一转盘包括至少一个与有机污染物对应的固定架,第二转盘包括至少一个与重金属离子污染物对应的固定架,第三转盘包括至少一个与含氮污染物对应的固定架;控制器根据有机污染物、重金属离子污染物、含氮污染物的含量控制旋转杆旋转,具体包括:
比较有机污染物含量、预设的有机物正常阈值和有机物超标阈值;
比较重金属离子污染物含量、预设的重金属离子正常阈值和重金属离子超标阈值;
比较含氮污染物含量、预设的含氮正常阈值和含氮超标阈值;
转盘包括四种状态,若污染物含量大于或等于超标阈值,则旋转杆旋转使转盘处于第一状态,第一状态为使最大面积的有机污染物或重金属离子污染物或含氮污染物对应的固定架位于水面下;
若污染物含量小于或等于正常阈值,则旋转杆旋转使转盘处于第二状态,第二状态为使小面积的有机污染物或重金属离子污染物或含氮污染物对应的固定架位于水面下;
若有机污染物含量大于有机物正常阈值且小于有机物超标阈值,重金属离子污染物含量大于含氮污染物,则旋转杆旋转使第一转盘处于第三状态,第一转盘的第三状态为使有机污染物和重金属离子污染物对应的固定架位于水面下;
若有机污染物含量大于有机物正常阈值且小于有机物超标阈值,重金属离子污染物含量小于含氮污染物,则旋转杆旋转使第一转盘处于第四状态,第一转盘的第四状态为使有机污染物和含氮污染物对应的固定架位于水面下;
若重金属离子污染物含量大于重金属离子正常阈值且小于重金属离子超标阈值,有机污染物含量大于含氮污染物,则旋转杆旋转使第二转盘处于第三状态,第二转盘的第三状态为使有机污染物和重金属离子污染物对应的固定架位于水面下,
若重金属离子污染物含量大于重金属离子正常阈值且小于重金属离子超标阈值,有机污染物含量小于含氮污染物,则旋转杆旋转使第二转盘处于第四状态,第二转盘的第四状态为使重金属离子污染物和含氮污染物对应的固定架位于水面下;
若含氮污染物含量大于含氮正常阈值且小于含氮超标阈值,有机污染物含量小于重金属离子污染物,则旋转杆旋转使第三转盘处于第三状态,第三转盘的第三状态为使含氮污染物和重金属离子污染物对应的固定架位于水面下,
若含氮污染物含量大于含氮正常阈值且小于含氮超标阈值,有机污染物含量大于重金属离子污染物,则旋转杆旋转使第三转盘处于第四状态,第三转盘的第四状态为使有机污染物和含氮污染物对应的固定架位于水面下。
根据检测的结果,对本装置进行调节,实现了多菌种协同水环境智慧治理、净化的目的,在治理水环境时,更佳科学合理,进一步提高使用效率。
根据上述设置,当污染物含量超过超标阈值时,本装置加强对该污染物的处理,投入更多的该污染物对应的微生物进入水中,当污染物的含量小于正常阈值时,减小或没有对该污染物的处理,即减小或没有改污染物对应的微生物进入水中;当污染物处于正常阈值与超标阈值之间时,合理调节本装置,投入合适的微生物进入水中,使用效率更高,更有针对性。
进一步的,船体上设置有机械臂和机械手。通过多自由度机械手臂可实现应急救援、重要水域安防等功能,并辅以目标识别和定位技术,搜寻并获取目标物。采用机械手,可以打捞水面各类垃圾。
本发明与现有技术相比,具有如下的优点和有益效果:
本发明多菌种协同作用的水环境治理装置及方法,本装置通过在菌种转盘上设置多个固定架,放置多个微生物,来实现对不同污染物的处理,提高污水处理效率。
同时还可以根据该区域的污染物的含量,调整位于水中的固定架,使所需的微生物位于水面下,进一步的提高污水处理效率,使多种菌种协同作用,以到达更好的处理效果。
附图说明
此处所说明的附图用来提供对本发明实施例的进一步理解,构成本申请的一部分,并不构成对本发明实施例的限定。在附图中:
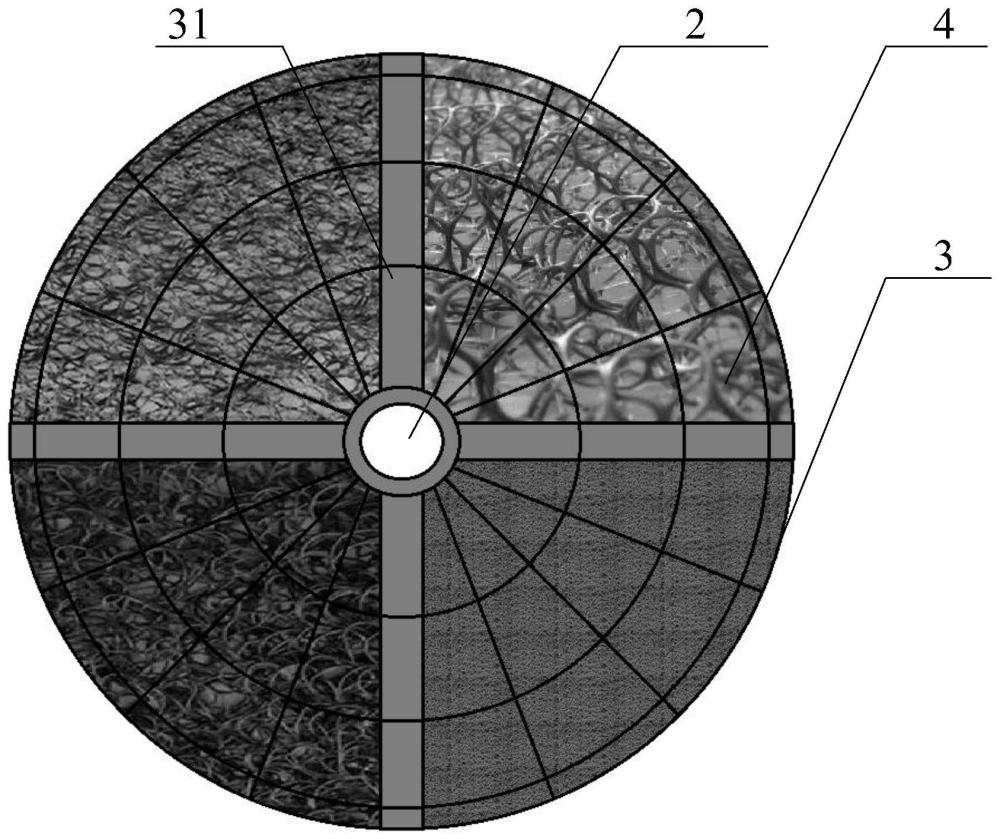
图1为实施例1中菌种转盘结构示意图;
图2为实施例2中本装置结构示意图;
图3为实施例3中菌种转盘分为四个放置区时,菌种转盘与水面的结构示意图;
图4为实施例5中菌种放置盘结构示意图。
附图中标记及对应的零部件名称:
1-船体,2-旋转杆,3-菌种转盘,31-分隔板,4-固定架,5-螺旋桨,6-污水检测装置,7-电机,8-机械臂,9-网桥天线,10-机械手,11-摄像头。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
在本发明的描述中,需要理解的是,术语“前”、“后”、“左”、“右”、“上”、“下”、“竖直”、“水平”、“高”、“低”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制。
【实施例1】
本装置包括船体1,固定架4和用于固定微生物的微生物载体,所述微生物载体固定在固定架4上,船体1上设置有一个旋转杆2,旋转杆2上可拆卸连接有菌种转盘3,旋转杆2能够带动其上的菌种转盘3以旋转杆2所在直线为轴线旋转;菌种转盘3上设置有三个分隔板31,三个分隔板31将菌种转盘3均分为三个用于放置固定架4的放置区。
在本实施例中,三个放置区分别放置有三个固定架,其中,第一个固定架上放置有以聚氨脂泡沫为载体固定镰刀菌菌丝体的微生物,第一个固定架为与有机污染物对应的固定架;第二个固定架为利用聚丙烯酞胺固定化酵母菌的微生物,第二个固定架为与重金属离子污染物对应的固定架;第三个固定架为利用固定化技术混合固定硝化细菌和反硝化细菌的微生物,第三个固定架为与含氮污染物对应的固定架。
在一个或多个实施例中,菌种转盘3完全位于水面下,旋转杆和菌种转盘设置在船体的下方。
在一个或多个实施例中,菌种转盘的一半位于水面下,即当船体位于水中时,旋转杆与水面共面,在使用时,旋转杆旋转将需要使用的固定架旋转到水面下方,不需要使用的固定架旋转到上方。例如当检测到水中有机污染物超标其他污染物不超标时,旋转杆旋转将第一个固定架旋转到水面下方。
在一个或多个实施例中,菌种转盘为圆形或矩形,菌种转盘的内部为空心,通过分隔板将菌种转盘内部均分为若干放置区。菌种转盘可以为图1所示,菌种转盘为圆形,两个直接相互垂直且转过旋转轴,两个分隔板将菌种转盘均分为四个放置区。
在一个或多个实施例中,分隔板的侧壁上设置有放置槽,固定架的侧面设置有放置块,固定架与菌种转盘连接时,固定架从菌种转盘的侧面滑入其内,使放置块位于放置槽内,最后通过螺丝固定菌种转盘和固定架,实现使用。
在一个或多个实施例中,固定架为网状平面结构,其形状可为扇形或矩形或三角形等,在本实施例中微生物、固定微生物的微生物载体均为现有的菌种、材料。固定架用于固定微生物载体,固定架由若干超细短纤维组成,若干超细短纤维通过喷丝板直接喷在成网帘上,形成超细纤维网,即固定架。将固定架浸泡至微生物载体材料中,静置3-5h,取出浸泡后的微生物载体固定架,冷冻干燥后将微生物放置在固定架上进行固定、驯化。
在一个或多个实施例中,在难降解有机污染物治理中,对含苯酚、氰、氯苯胺及DDT等难降解有机物的废水,采用琼脂、海藻酸钙、卡拉胶和聚丙烯酰胺等载体包埋固定化微生物降解苯酚,以聚氨脂泡沫为载体固定镰刀菌菌丝体,能够有效降解酚。海藻酸钙凝胶包埋固定化Pimelobactersp.细胞进行降解吡啶的研究,利用海藻酸钙凝胶联合包埋固定Phanerochaetechrysosporium,结合吸附剂(粉末活性炭)一起用于降解五氯酚。采用聚丙烯无纺布(多孔结构)与PVA的复合载体包埋固定化优势菌种来降解含有喳琳、异喳琳、毗陡的高浓度氨氮焦化废水,3种难降解有机物经处理8h后降解率均在90%以上。在高浓度有机废水的处理中,采用包埋法与吸附法相结合的方法固定甲烷八叠球菌,其最适pH值为7.2,最高去除率为94.29%。采用对氯代芳香类有机物(Aox)具有高效降解作用的混合菌,用聚乙烯醇包埋后在厌氧条件下处理含Aox废水。第一固定架上的微生物以及微生物载体包括但不限于以上的材料。
在重金属离子的去除中,利用聚丙烯酞胺固定化酵母菌细胞去除电镀废水中的Cod;海藻酸钠作为固定化载体、固定化枯草杆菌对含镉废水进行处理。第二固定架上的微生物以及微生物载体包括但不限于以上的材料。
在处理含氮废水时,利用固定化技术混合固定了硝化细菌和反硝化细菌。第三固定架上的微生物以及微生物载体包括但不限于以上的材料。
【实施例2】
在上述实施例的基础上,船体1上设置有用于推进船体1移动的螺旋桨5,所述螺旋桨5的旋转面与菌种转盘3的旋转面平行且相对。
在一个或多个实施例中,旋转杆与螺旋桨5的旋转轴相互重合,螺旋桨5上的旋转叶片旋转时所在的平面为螺旋桨的旋转面,菌种转盘在旋转杆带动下旋转所在的平面即为菌种转盘的旋转面,本实施例中旋转杆和其上的菌种转盘均位于水面下方。
在一个或多个实施例中,如图2所示,本装置位于水中时,旋转杆2与水平面共线,旋转杆在旋转时,旋转杆上方的菌种转盘位于水面上,旋转杆下方的菌种转盘位于水面下,螺旋桨5的旋转轴位于旋转杆的下方,螺旋桨5上的旋转叶片与位于水面下方的菌种转盘正面相对,螺旋桨旋转时带动水流动,撞击位于水面下的菌种转盘,促进其上的微生物释放。
【实施例3】
在上述实施例的基础上,船体1上设置有污水检测装置6、有机物检测装置、重金属检测装置。以上三个检测装置均为现有的检测装置,其中污水检测装置6用于检测含氮污染物的含量,有机物检测装置用于检测有机污染物的含量,重金属检测装置用于检测重金属离子含量。比较有机污染物含量、预设的有机物正常阈值和有机物超标阈值;
比较重金属离子污染物含量、预设的重金属离子正常阈值和重金属离子超标阈值;
比较含氮污染物含量、预设的含氮正常阈值和含氮超标阈值;
转盘包括四种状态,若污染物含量大于或等于超标阈值,则旋转杆旋转使转盘处于第一状态,第一状态为使最大面积的有机污染物或重金属离子污染物或含氮污染物对应的固定架4位于水面下;
若污染物含量小于或等于正常阈值,则旋转杆旋转使转盘处于第二状态,第二状态为使小面积的有机污染物或重金属离子污染物或含氮污染物对应的固定架4位于水面下;
若有机污染物含量大于有机物正常阈值且小于有机物超标阈值,重金属离子污染物含量大于含氮污染物,则旋转杆旋转使第一转盘处于第三状态,第一转盘的第三状态为使有机污染物和重金属离子污染物对应的固定架4位于水面下;
若有机污染物含量大于有机物正常阈值且小于有机物超标阈值,重金属离子污染物含量小于含氮污染物,则旋转杆旋转使第一转盘处于第四状态,第一转盘的第四状态为使有机污染物和含氮污染物对应的固定架4位于水面下;
若重金属离子污染物含量大于重金属离子正常阈值且小于重金属离子超标阈值,有机污染物含量大于含氮污染物,则旋转杆旋转使第二转盘处于第三状态,第二转盘的第三状态为使有机污染物和重金属离子污染物对应的固定架4位于水面下;
若重金属离子污染物含量大于重金属离子正常阈值且小于重金属离子超标阈值,有机污染物含量小于含氮污染物,则旋转杆旋转使第二转盘处于第四状态,第二转盘的第四状态为使重金属离子污染物和含氮污染物对应的固定架4位于水面下;
若含氮污染物含量大于含氮正常阈值且小于含氮超标阈值,有机污染物含量小于重金属离子污染物,则旋转杆旋转使第三转盘处于第三状态,第三转盘的第三状态为使含氮污染物和重金属离子污染物对应的固定架4位于水面下,
若含氮污染物含量大于含氮正常阈值且小于含氮超标阈值,有机污染物含量大于重金属离子污染物,则旋转杆旋转使第三转盘处于第四状态,第三转盘的第四状态为使有机污染物和含氮污染物对应的固定架4位于水面下。
在一个或多个实施例中,船体1上设置有三个旋转杆2,三个旋转杆2上均设置有一个菌种转盘3,三个旋转杆均连接有一个电机,三个菌种转盘3分别为用于处理有机污染物的第一转盘、用于处理重金属离子污染物的第二转盘、用于处理含氮污染物的第三转盘。本装置位于水中时,旋转杆2与水平面共线,如图3所示,虚线为水平面,虚线下的固定架位于水面下,虚线上的固定架位于水面上,旋转杆在旋转时,旋转杆上方的菌种转盘位于水面上,旋转杆下方的菌种转盘位于水面下,螺旋桨5的旋转轴位于旋转杆的下方。
在上述基础上,在一个具体实施例中,三个菌种转盘均设置有两个分隔板31将菌种转盘3均分为四个用于放置固定架4的放置区。
第一个菌种转盘中放置有两个第一个固定架、一个第二个固定架和一个第三固定架,且两个第一个固定架相邻;第二个菌种转盘中放置有一个第一个固定架、两个第二个固定架和一个第三固定架,且两个第二个固定架相邻;第三个菌种转盘中放置有一个第一个固定架、一个第二个固定架和两个第三固定架,且两个第三个固定架相邻;
当检测到三种污染物含量大于或等于对应的超标阈值时,第一个菌种转盘旋转,使两个第一个固定架位于水面下;第二个菌种转盘旋转使两个第二个固定架位于水面下;第三个菌种转盘旋转使两个第三个固定架位于水面下。此时三个旋转杆均处于第一状态。
当检测到三种污染物含量小于或等于对应的正常阈值时,第一个菌种转盘旋转,使一个第二个固定架和一个第三固定架位于水面下;第二个菌种转盘旋转使一个第一个固定架和一个第三固定架位于水面下;第三个菌种转盘旋转使一个第一个固定架和一个第二个固定架位于水面下。此时三个旋转杆均处于第二状态。
当检测到有机污染物含量大于有机物正常阈值且小于有机物超标阈值,重金属离子污染物含量大于含氮污染物,第一个菌种转盘旋转,使一个第一个固定架和一个第二个固定架位于水面下;此时第一个菌种转盘对应的旋转杆处于第三状态;
当检测到重金属离子污染物含量大于重金属离子正常阈值且小于重金属离子超标阈值,有机污染物含量大于含氮污染物,第二个菌种转盘旋转,使一个第一个固定架和一个第二个固定架位于水面下;此时第二个菌种转盘对应的旋转杆处于第三状态;
当检测到含氮污染物含量大于含氮正常阈值且小于含氮超标阈值,有机污染物含量小于重金属离子污染物,第三个菌种转盘旋转,使一个第二个固定架和一个第三个固定架位于水面下;此时第三个菌种转盘对应的旋转杆处于第三状态;
当检测到有机污染物含量大于有机物正常阈值且小于有机物超标阈值,重金属离子污染物含量小于含氮污染物,第一个菌种转盘旋转,使一个第一个固定架和一个第三个固定架位于水面下;此时第一个菌种转盘对应的旋转杆处于第四状态;
当检测到重金属离子污染物含量大于重金属离子正常阈值且小于重金属离子超标阈值,有机污染物含量小于含氮污染物,第二个菌种转盘旋转,使一个第三个固定架和一个第二个固定架位于水面下;此时第二个菌种转盘对应的旋转杆处于第四状态;
当检测到含氮污染物含量大于含氮正常阈值且小于含氮超标阈值,有机污染物含量大于重金属离子污染物,第三个菌种转盘旋转,使一个第一个固定架和一个第三个固定架位于水面下;此时第三个菌种转盘对应的旋转杆处于第四状态。
在上述基础上,在一个具体实施例中,三个菌种转盘均设置有两个分隔板31将菌种转盘3均分为三个用于放置固定架4的放置区。三个菌种转盘均相同,均包括一个第一个固定架、一个第二个固定架和一个第三个固定架。
当检测到三种污染物含量大于或等于对应的超标阈值时,三个菌种转盘分别旋转依次使第一个固定架完全位于水面下、第二个固定架完全位于水面下、第三个固定架完全位于水面下。此时三个旋转杆均处于第一状态。
当检测到三种污染物含量小于或等于对应的正常阈值时,三个菌种转盘分别旋转依次使第一个固定架完全位于水面上、第二个固定架完全位于水面下、第三个固定架完全位于水面下。此时三个旋转杆均处于第二状态。
当检测到有机污染物含量大于有机物正常阈值且小于有机物超标阈值,重金属离子污染物含量大于含氮污染物,第一个菌种转盘旋转,使第一个固定架的一半位于水中且第二个固定架完全位于水面下;此时第一个菌种转盘对应的旋转杆处于第三状态;
当检测到重金属离子污染物含量大于重金属离子正常阈值且小于重金属离子超标阈值,有机污染物含量大于含氮污染物,第二个菌种转盘旋转,使一个第二个固定架的一半位于水面下且第一个固定架完全位于水面下;此时第二个菌种转盘对应的旋转杆处于第三状态;
当检测到含氮污染物含量大于含氮正常阈值且小于含氮超标阈值,有机污染物含量小于重金属离子污染物,第三个菌种转盘旋转,使一个第三个固定架的一半位于水面下且一个第二个固定架完全位于水面下;此时第三个菌种转盘对应的旋转杆处于第三状态;
当检测到有机污染物含量大于有机物正常阈值且小于有机物超标阈值,重金属离子污染物含量小于含氮污染物,第一个菌种转盘旋转,使一个第一个固定架的一半位于水面下且一个第三个固定架完全位于水面下;此时第一个菌种转盘对应的旋转杆处于第四状态;
当检测到重金属离子污染物含量大于重金属离子正常阈值且小于重金属离子超标阈值,有机污染物含量小于含氮污染物,第二个菌种转盘旋转,使一个第三个固定架完全位于水面下且一个第二个固定架的一半位于水面下;此时第二个菌种转盘对应的旋转杆处于第四状态;
当检测到含氮污染物含量大于含氮正常阈值且小于含氮超标阈值,有机污染物含量大于重金属离子污染物,第三个菌种转盘旋转,使一个第一个固定架完全位于水面下且一个第三个固定架的一半位于水面下;此时第三个菌种转盘对应的旋转杆处于第四状态。
在上述实施例中,污染物的正常阈值、污染物的超标阈值根据污水标准确定,根据不同的使用情景,可进行调整,本发明人对此并不做限定。
【实施例4】
在上述实施例的基础上,如图2所示,本装置的船上舱分别装有太阳能电池板、摄像头11、GPS仪器,船上舱还固定有多自由度机械臂8、机械手10和网桥天线9,船下舱内部装有喷水推进器、螺旋桨5、三个旋转杆、污水检测装置6、水环境监测控制系统、储能电池组和安防机器人控制系统。安防机器人控制系统为现有结构,其通过控制机械手,可以打捞水面各类垃圾,三个旋转杆上均连接有一个菌种转盘,三个旋转杆分别连接有一个电机7,所述电机为防水步进电机。推进器为喷水推进器。
机械臂有6个自由度,机械臂为现有的结构包括肩蜗杆、肩蜗轮、肩轴、肩摆动组件、肩连杆、肘摆动组件、肘连杆、腕摆动组件、手爪壳和手爪组件,肩蜗杆连接肩蜗轮,肩蜗轮安装在肩轴上,肩轴与肩摆动组件连接,肩摆动组件固定有肩连杆,肩连杆连接肘摆动组件,肘摆动组件固定有肘连杆,肘连杆连接腕摆动组件,腕摆动组件上固定有手爪壳,手爪壳安装手爪组件。
本装置在使用时,将本装置布置在水域补水口位置,通过补水口的水流冲刷将携带的微生物菌种释放到水域中,实现水环境治理。
本装置在水域的多个区域中放置有多个监测点位,本装置的水域环境监测控制系统,可实现布控水域全方位无死角的智慧化水环境治理和安全防护。监测点位对该处的污染物进行监测,并将监测结果发送给水域环境监测控制系统,当该处的污染物含量超标时,将本装置的船体开到该区域,并根据具体的重金属离子污染物含量、有机污染物含量和含氮污染物含量,调节旋转杆旋转,使对应的固定架位于水下,实现污水处理。
【实施例5】
如图4所示,菌种放置盘3为内部设置有中心柱的空心的圆柱,菌种放置盘3的侧面、上下端面均开口,菌种放置盘3的侧面、上下端面的开口处还可以设置为网状结构。
在一个或多个实施例中,分隔板31的侧面设置有放置槽,微生物承载架4的侧面设置有放置块,如图3所示,菌种放置盘3与微生物承载架4连接时,放置块位于放置槽内。微生物承载架4放置在放置区中后,微生物承载架4与菌种放置盘3的放置区通过螺栓进一步固定连接。菌种放置盘3垂直连接有旋转杆2,所述旋转杆2能够带动菌种放置盘3以旋转杆2所在直线为轴线旋转。在本装置使用时,旋转杆2与电机7连接,电机带动旋转杆旋转,从而带动菌种放置盘3旋转。
在本文中使用的术语“连接”在不进行特别说明的情况下,可以是直接相连,也可以使经由其他部件间接相连。
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。