一种自动夹紧管钳
文献发布时间:2023-06-19 19:35:22
技术领域
本申请涉及管道安装工具的领域,尤其是涉及一种自动夹紧管钳。
背景技术
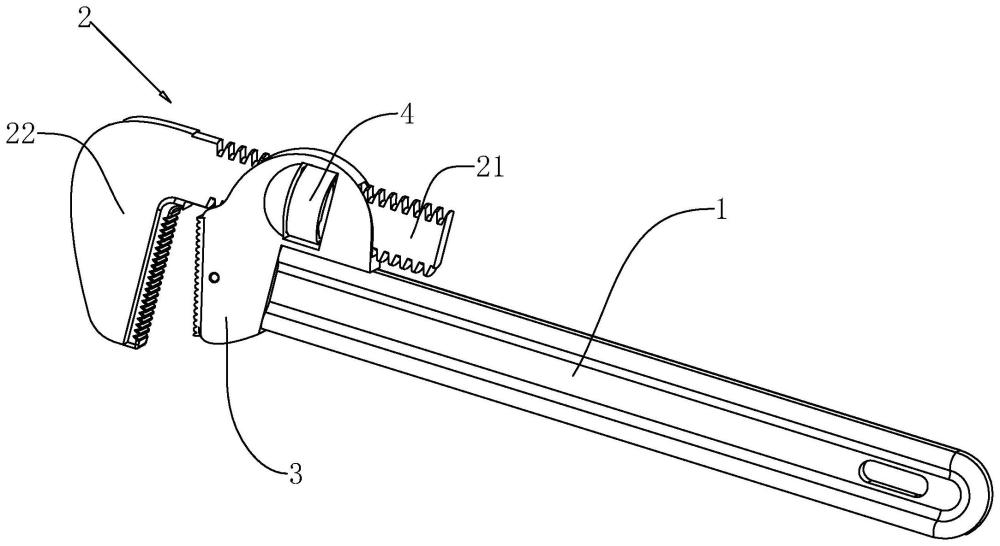
管钳,是靠两个齿形钳牙来夹紧并转动管子或其他圆筒形表面的一种钳子,常用来紧固或松动铁制管道和管件。参照图1,管钳通常包括钳柄1、活动卡爪2和连接部3,活动卡爪2包括互相垂直固定连接的卡臂22和力臂21,力臂21滑动连接于连接部3上且连接部3与卡臂22上配合设有用于固定管道的固定齿,连接部3上转动连接有调整轮4,力臂21穿设于调整轮4内且力臂21与调整轮4螺纹连接,钳柄1固定连接于连接部3远离卡壁一端且力臂21与钳柄1长度方向互相平行。使用时将管道或管件置于卡臂22与连接部3之间,转动调整轮4将管道卡紧,转动钳柄1带动管道转动。
相关技术可参考公告号为CN102107407A的中国专利公开了电动管钳,由手柄、活动钳口和调节螺母组成,手柄的前端是固定钳口,活动钳口通过调节螺母插设在手柄的前端,在调节螺母周围装有活动支架,活动支架上设有电机和支出筋,活动支架套在调节螺母上,支出筋搭在手柄、活动钳口上阻止转动,电机通过皮带与调节螺母边缘上的皮带轮连接,手柄上设有电源和双向开关,电机通过双向开关与电源连接
针对上述中的相关技术,将管钳与管道固定时,电机通过皮带轮带动调节螺母转动来缩小活动钳口与固定钳口的间距,进而使活动钳口与固定钳口配合挤压固定管道,管钳与管道之间的压力需要施加到一定程度来保证两者的连接牢固程度,但如果压力过大则会后损伤管道的风险,使用双向开关来手动控制电机的启停,难以感知并准确地控制管钳与管道之间的压力,易损伤管道。
发明内容
为了精准控制管钳与管道之间的压力,避免在使用管钳时因压力过大而对管道造成损伤,本申请提供一种自动夹紧管钳。
本申请提供一种自动夹紧管钳,采用如下的技术方案:
一种自动夹紧管钳,包括钳柄、活动卡爪和连接部,活动卡爪包括力臂和用于配合连接部夹紧管道的卡臂,力臂滑动连接于连接部上且与卡臂垂直,连接部上转动连接有用于驱动力臂滑动的调整轮,力臂穿设于调整轮内且与调整轮螺纹连接,钳柄连接于连接部上,所述连接部上设有电机,电机的输出轴固定连接有驱动齿轮,调整轮(4)沿其周向设置有从动齿轮,驱动齿轮与从动齿轮啮合,连接部设有检控电路一,检控电路一包括感应模块一、比较模块一和控制模块一:
感应模块一,包括压力传感器一,压力传感器一设置于连接部靠近卡臂一侧表面,压力传感器一用于感应连接部与管道之间的压力,并输出感应信号;
比较模块一,比较模块一与感应模块一电连接,比较模块一用于接收感应模块一的感应信号,当比较模块一接收到感应信号时,将感应信号对应的电压值与预设电压值一相比较,如果感应信号的电压值大于预设电压值一,则比较模块一输出关闭信号;
控制模块一,控制模块一与比较模块一电连接,控制模块一用于接收比较模块一的关闭信号,控制模块一接收到关闭信号时,输出控制信号,控制信号控制电机关闭。
通过采用上述技术方案,使用管钳转动管道时,需要将管道置于连接部和卡臂之间,电机通过驱动齿轮和从动齿轮来驱动调整轮转动,感应模块一的压力传感器一感应管道与连接部之间的压力,输出感应信号,比较模块一接收感应信号,比较模块一将接收到的感应信号的电压值与预设电压值一相比较,如果感应信号对应的电压值大于预设电压值一,则输出关闭信号,控制模块一接收到关闭信号,输出控制信号,控制信号控制电机关闭,实现自动关闭电机的功能,便于精准控制管钳与管道之间的压力,避免在使用管钳时因压力过大而对管道造成损伤。
可选的,所述连接部开设有用于容纳电机与驱动齿轮的安装腔,安装腔内设有用于安装电机的隔板,电机可拆卸连接于隔板上,隔板上开设有用于避让电机的输出轴的避让槽,驱动齿轮设置于隔板远离电机一侧。
通过采用上述技术方案,在工程施工中,搬运管钳时难免出现丢掷和磕碰等现象,电机属于较为精密的设备,长期随管钳一起接受震动冲击会影响电机的使用寿命。将电机可拆卸安装于安装腔的隔板上,在不使用电机时可以将电机拆卸并向远离从动齿轮方向拉拽,使驱动齿轮与从动齿轮解除啮合状态后将电机与驱动齿轮整体拆下,并单独保存,有助于保护电机,延长电机使用寿命。
可选的,所述力臂远离卡臂一端固定连接有用于限制力臂从连接部脱出的限位卡块。
通过采用上述技术方案,使用管钳固定管道时,需要向使用电机驱动调整轮转动,带动活动卡爪向远离连接部方向移动,如果管道直径较大,则需要卡臂移动至较远位置,电机驱动速度较快,力臂有从连接部脱出的风险。在力臂滑动至即将脱出位置时,限位卡块会与连接部抵接进而阻止力臂继续滑动,防止力臂从连接部脱出。
可选的,所述连接部设有检控电路二,检控电路二包括感应模块二、比较模块二和控制模块二:
感应模块二,包括压力传感器二,压力传感器二设置于连接部靠近限位卡快一侧表面,压力传感器二用于感应连接部与限位卡块之间的压力,并输出感应信号;
比较模块二,比较模块二与感应模块二电连接,比较模块二用于接收感应模块二的感应信号,当比较模块二接收到感应信号时,将感应信号对应的电压值与预设电压值二相比较,如果感应信号的电压值大于预设电压值二,则比较模块二输出关闭信号;
控制模块二,控制模块二与比较模块二电连接,控制模块二用于接收比较模块二的关闭信号,控制模块二接收到关闭信号时,输出控制信号,控制信号控制电机关闭。
通过采用上述技术方案,通过限位卡块可以阻止力臂从限位卡块脱出,但此时电机仍然处于启动状态,若不能察觉并及时关闭电机,强行使电机停转有可能会造成电机的损坏。感应模块二感应连接部与限位卡块之间的压力,并输出感应信号,比较模块二接收感应信号,比较模块二将接收到的感应信号的电压值与预设电压值二相比较,如果感应信号对应的电压值大于预设电压值二,则输出关闭信号,控制模块二接收到关闭信号,输出控制信号,控制信号控制电机关闭,实现及时关闭电机的功能,有助于在限位卡块与连接部抵接时及时关闭电机,避免电机损坏。
可选的,所述钳柄与连接部转动连接,连接部上开设有若干个用于固定钳柄的锁紧槽,钳柄上滑动连接有与锁紧槽相配合的锁紧块,锁紧槽沿钳柄的运动路径分布于连接部上。
通过采用上述技术方案,为了获得更大的转动力矩,钳柄通常较长,管道铺设时,为了可以充分利用有限的空间,管道通常会借助支架设置于顶板下方或墙壁一侧,使用管钳时因为顶板和墙壁的阻挡钳柄难以围绕管道整周转动,而管道的固定通常需要将管道转动数周,因而需要将管钳多次固定和松开。钳柄与连接部转动连接,使用时将锁紧块滑入锁紧槽内使钳柄与连接部保持相对固定,管手握管钳将连接部转动至极限位置,即钳柄与墙壁或其他结构抵接位置。将锁紧块从锁紧槽内滑出,钳柄与连接部解除相对固定状态,将钳柄反方向转动后再次将锁紧块滑入锁紧槽,管钳即可获得继续向所需方向转动的空间。有助于减少管钳在管道上固定和拆卸的次数,提高管钳转动管道的工作效率。
可选的,所述钳柄上设有弹性件,弹性件平行于钳柄长度方向设置,弹性件两端分别固定连接钳柄与锁紧块,弹性件处于自然状态时,锁紧块卡接于锁紧槽内。
通过采用上述技术方案,弹性件对锁紧块施加朝向锁紧槽的锁紧力,当转动钳柄至所需的角度后,锁紧块在锁紧力的作用下滑入锁紧槽内将钳柄与连接部的角度锁死,弹性件对锁紧块施加拉力,防止其自行从锁紧槽内滑出,有助于保持钳柄与连接部的锁紧状态。
可选的,所述钳柄与连接部通过转盘连接,转盘转动连接于连接部上,钳柄转动连接于转盘上,转盘与钳柄的转动轴线互相垂直,连接部上设置有若干个与钳柄相配合的卡接槽,卡接槽沿钳柄的运动路径分布于连接部上。
通过采用上述技术方案,钳柄与转盘转动连接,可通过钳柄与转盘转动使钳柄卡入或脱离卡接槽,通过转盘与连接部的转动,可以带动卡钳转动至与不同卡接槽对正的位置,进而使钳柄可以灵活地切换于不同的卡接槽内。当使用管钳将连接部转动至极限位置,即钳柄与墙壁或其他结构抵接位置。将钳柄从卡接槽内滑出,钳柄与连接部解除卡接状态,反向转动转盘带动钳柄反方向转动后再次将钳柄滑入卡接槽,管钳即可获得继续向所需方向转动的空间。有助于减少管钳在管道上固定和拆卸的次数,提高管钳转动管道的工作效率。
可选的,所述钳柄包括固定杆和调节杆,固定杆与连接部连接,调节杆上开设有与固定杆向配合的滑槽,固定杆远离连接部一端滑动连接于滑槽内,调节杆对应滑槽开口一端开设有若干调节缝隙,调节缝隙平行于调节杆长度方向设置且环绕调节杆分布,调节杆对应滑槽开口一端螺纹连接有固定套环,固定套环内径逐渐缩小,固定套环内径靠近调节杆一端较大。
通过采用上述技术方案,当转动管道所需的驱动力较大时,需要使用钳柄较长的管钳来增加力矩;当管道所处空间较为狭窄时,需要使用钳柄较短的管钳,便于工作人员的操作。通过改变固定杆伸入滑槽内的距离,并通过固定套环将固定杆与调节杆固定,可以方便的调节钳柄的长度,有助于管钳适应各种使用场景,拓展其使用范围。
综上所述,本申请包括以下至少一种有益技术效果:
1.使用管钳固定管道时,压力传感器一感应管道与连接部之间的压力,输出感应信号,比较模块一接收感应信号,比较模块一将接收到的感应信号的电压值与预设电压值一相比较,如果感应信号对应的电压值大于预设电压值一,则输出关闭信号,控制模块一接收到关闭信号,输出控制信号,控制信号控制电机关闭,实现自动关闭电机的功能,便于精准控制管钳与管道之间的压力,避免在使用管钳时因压力过大而对管道造成损伤;
2.钳柄通常设计得较长来增加转动力矩,管道通常会借助支架设置于顶板下方或墙壁一侧,因为顶板和墙壁的阻挡钳柄难以围绕管道整周转动,钳柄与连接部转动连接,使用时将锁紧块滑入锁紧槽内使钳柄与连接部保持相对固定,管手握管钳将连接部转动至与墙壁或其他结构抵接位置,将锁紧块从锁紧槽内滑出,钳柄与连接部解除相对固定状态,将钳柄反方向转动后再次将锁紧块滑入锁紧槽,管钳即可获得继续向所需方向转动的空间。有助于减少管钳在管道上固定和拆卸的次数,提高管钳转动管道的工作效率。
附图说明
图1是背景技术中管钳的整体结构示意图。
图2是实施例一的整体结构示意图。
图3是实施例一中用于展示感应模块一、比较模块一和控制模块一的结构示意图。
图4是图2中A部分的放大示意图。
图5是实施例一中用于展示感应模块二、比较模块二和控制模块二的结构示意图。
图6是实施例一中用于展示钳柄的爆炸示意图。
图7是实施例一中用于展示锁紧槽的结构示意图。
图8是实施例二中用于展示卡接槽的结构示意图。
附图标记说明:1、钳柄;11、锁紧块;12、弹性件;13、卡接槽;14、固定杆;15、调节杆;151、滑槽;152、调节缝隙;16、固定套环;2、活动卡爪;21、力臂;211、限位卡快;22、卡臂;3、连接部;31、安装腔;32、隔板;321、避让槽;33、锁紧槽;34、转盘;4、调整轮;41、从动齿轮;5、电机;51、驱动齿轮;61、感应模块一;611、压力传感器一;62、感应模块二;621、压力传感器二;71、比较模块一;72、比较模块二;81、控制模块一;82、控制模块二。
具体实施方式
以下结合全部附图对本申请作进一步详细说明。
实施例一:
参照图2,一种自动夹紧管钳,包括钳柄1、活动卡爪2和连接部3。活动卡爪2包括力臂21和卡臂22,力臂21与卡臂22互相垂直连接,卡臂22用于配合连接部3一起固定管道,力臂21滑动连接于连接部3上,用于驱动卡臂22靠近和远离连接部3。连接部3上转动连接有调整轮4,调整轮4整体为两端开口的圆柱筒形,力臂21穿设于调整轮4内,调整轮4与力臂21螺纹连接,转动调整轮4可以驱使力臂21沿其长度方向滑动,钳柄1连接于连接部3上,用于增加转动管道的力矩。连接部3上设有用于驱动调整轮4转动的电机5,使用电机5代替手动来驱动调整轮4,有助于增加活动卡钳的调整速度,提高工作效率。
参照图2和图3,连接部3设有检控电路一,检控电路包括感应模块一61、比较模块一71和控制模块一81:
感应模块61,包括压力传感器一611,压力传感器一611设置于连接部3靠近卡壁一侧表面,用于感应连接部3与管道之间的压力,压力传感器一611感应到压力时,输出感应信号;
比较模块一71,包括:
比较器T1,比较器T1的正向输入端与压力传感器一611的输出端电连接;
三级管Q1,三级管Q1的基极与比较器T1的输出端电连接;
电阻R1,电阻R1的一端与三极管Q1的集电极电连接,电阻R1的另一端与电源VCC1电连接;
继电器一的电磁线圈KA1,继电器一的电磁线圈KA1的一端与三极管Q1的发射极电连接;
电阻R2,电阻R2的一端与继电器一的电磁线圈KA1远离三极管Q1的一端电连接,电阻R2的另一端接地;
控制模块一81,包括:
继电器一的常闭开关KA1-2,继电器的常闭开关KA1-2的一端电连接于继电器一的电磁线圈KA1于电阻R2之间;
电机5,电机5的一端与继电器一的常闭开关KA1-2远离电阻R2的一端电连接;
电阻R3,电阻R3的一端与电机5远离继电器一的常闭开关KA1-2的一端电连接,电阻R3的另一端接地。
参照图2和图3,将管道置于连接部3和卡臂22之间,电机5驱动调整轮4转动带动力臂21滑动,进而带动卡臂22向靠近连接部3方向移动,当管道两端分别与卡臂22和连接部3抵接时,压力传感器一611感应到管道与连接部3之间的压力,输出感应信号,比较器T1接收到感应信号,将感应信号对应的电压值与预设电压值一相比较,预设电压值一为管钳压紧管道的最佳压力,当感应信号对应的电压值大于预设电压值一时,输出关闭信号,控制模块一81接收关闭信号,输出控制信号,控制电机5关闭,调整轮4停止转动,力臂21和卡臂22停止移动,有助于精准控制管钳与管道之间的压力,避免在使用管钳时因压力过大而对管道造成损伤。
参照图2和图4,连接部3开设有安装腔31,安装腔31内设有隔板32,将安装腔31分为两个部分,电机5采用螺栓安装于隔板32上,隔板32上开设有用于避让电机5的输出轴的避让槽321,电机5输出轴穿过隔板32且固定连接有驱动齿轮51,调整轮4沿其周向固定连接有从动齿轮41,驱动齿轮51与从动齿轮41啮合,电机5通过驱动齿轮51与从动齿轮41来传导驱动力使调整轮4转动。在不使用电机5时,可以将固定电机5的螺栓一一拆下,使电机5与隔板32分离,并向远离隔板32的方向拉拽电机5,电机5输出轴拉动驱动齿轮51与从动齿轮41解除啮合状态,将电机5与驱动齿轮51整体拆下并单独保存。使用电机5时同样可以方便快速地将电机5安装。可以有效避免搬运管钳时丢掷和磕碰给电机5带来的冲击,延长电机5使用寿命。
参照图2,力臂21远离卡壁一端固定连接有限位卡快211,限位卡快211垂直于力臂21长度方向的截面积大于力臂21,当力臂21滑动至即将脱出连接部3的位置时,限位卡块会与连接部3抵接进而阻止力臂21继续滑动,防止力臂21从连接部3脱出。
参照图2和图5,通过限位卡块211可以阻止力臂21从限位卡块211脱出,但此时电机5仍然处于启动状态,若不能察觉并及时关闭电机5,强行使电机5停转有可能会造成电机5的损坏。连接部3设有检控电路二,检控电路二包括感应模块二62、比较模块二72和控制模块二82:
感应模块二62,包括压力传感器二621,压力传感器二621设置于连接部3靠近限位卡快211一侧表面,用于感应连接部3与限位卡块211之间的压力,压力传感器二621感应到压力时,输出感应信号;
比较模块二72,包括:
比较器T2,比较器T2的正向输入端与压力传感器二621的输出端电连接;
三级管Q2,三级管Q2的基极与比较器T2的输出端电连接;
电阻R4,电阻R4的一端与三极管Q2的集电极电连接,电阻R4的另一端与电源VCC2电连接;
继电器二的电磁线圈KA2,继电器二的电磁线圈KA2的一端与三极管Q2的发射极电连接;
电阻R5,电阻R5的一端与继电器二的电磁线圈KA2远离三极管Q2的一端电连接,电阻R5的另一端接地;
控制模块二82,包括:
继电器二的常闭开关KA2-2,继电器二的常闭开关KA2-2的一端电连接于继电器二的电磁线圈KA2与电阻R5之间;
电机5,电机5的一端与继电器的常闭开关KA2-2远离电阻R5的一端电连接;
电阻R6,电阻R6的一端与电机5远离继电器二的常闭开关KA2-2的一端电连接,电阻R6的另一端接地。实现了自动关闭电机5的功能,有助于在限位卡块211与连接部3抵接时及时关闭电机5,避免电机5损坏。
参照图6,钳柄1包括固定杆14和调节杆15,调节杆15上开设有与固定杆14向配合的滑槽151,固定杆14一端与连接部3连接,另一端滑动连接于滑槽151内。调节杆15靠近固定杆14一端开设有若干平行于调节杆15长度方向设置的调节缝隙152,调节缝隙152环绕调节杆15分布,用于为调节杆15的形变提供空间。调节杆15靠近固定杆14一端螺纹连接有固定套环16,固定套环16内径逐渐缩小,固定套环16内径靠近调节杆15一端较大,可通过旋紧固定套环16来缩小滑槽151开口一端的直径,进而使滑槽151内壁与固定杆14抵接,锁定钳柄1长度。便于灵活方便地调节钳柄1的长度,有助于管钳适应各种使用场景,拓展其使用范围。
参照图7,固定杆14远离调节杆15一端转动连接于连接部3上,连接部3上开设有若干个锁紧槽33,固定杆14上沿其长度方向滑动连接有与锁紧槽33相配合的锁紧块11,若干个锁紧槽33沿钳柄1的运动路径分布于连接部3上。固定杆14上设有弹性件12,弹性件12为拉力弹簧,弹性件12同样平行于钳柄1长度方向设置,弹性件12一端与固定杆14固定连接,另一端与锁紧块11固定连接,弹性件12处于自然状态时,锁紧块11卡接于锁紧槽33内。
参照图7,通常管道的转动需要较大的转动驱动力,为了获得更大的转动力矩,钳柄1通常设计的较长,而管道一般铺设于地下车库、管道井和地下管廊等狭小空间内,为了可以充分利用有限的空间,管道通常会借助支架紧贴顶板下方或墙壁一侧敷设,使用管钳时因为顶板和墙壁的阻挡,钳柄1难以围绕管道整周转动。管道的固定通常需要将管道转动数周,此次需要将管钳多次固定和松开来重新获得钳柄1转动的空间。钳柄1与连接部3转动连接,使用时将锁紧块11滑入锁紧槽33内使钳柄1与连接部3保持相对固定状态,驱动管钳将连接部3连通管道转动至极限位置,即钳柄1与墙壁或其他结构抵接无法继续转动位置,将锁紧块11从锁紧槽33内滑出,钳柄1与连接部3随即解除相对固定状态,将钳柄1反方向转动后松开锁紧块11,锁紧块11在弹性件12的拉动下再次滑入锁紧槽33,管钳再次获得继续向所需方向转动的空间。有助于减少管钳在管道上固定和拆卸的次数,提高管钳转动管道的工作效率。
本申请实施例一种自动夹紧管钳的实施原理为:使用管钳转动管道之间,启动电机5使调整轮4转动,驱动力臂21滑动,使卡臂22向远离连接部3方向移动,直至力臂21滑动至即将脱出连接部3的位置时,限位卡块与压力传感器二621抵接,感应模块61二的压力传感器二621感应限位卡快211与连接部3之间的压力,输出感应信号,比较模块二72接收感应信号,比较模块二72将接收到的感应信号的电压值与预设电压值二相比较,如果感应信号对应的电压值大于预设电压值二,则输出关闭信号,控制模块二82接收到关闭信号,输出控制信号,控制信号控制电机5关闭,力臂21停止滑动。
移动管钳使得管道置于卡臂22与连接部3之间,再次启动电机5使调整轮4转动,驱动力臂21滑动,使卡臂22向靠近连接部3方向移动,直至管道两侧与卡臂22和连接部3抵接,压力传感器一611感应到管道与连接部3之间的压力,输出感应信号,比较模块一71接收感应信号,比较模块一71将接收到的感应信号的电压值与预设电压值一相比较,如果感应信号对应的电压值大于预设电压值一,则输出关闭信号,控制模块一81接收到关闭信号,输出控制信号,控制信号控制电机5关闭。实现自动关闭电机5的功能,便于精准控制管钳与管道之间的压力,避免在使用管钳时因压力过大而对管道造成损伤。
实施例二:
实施例二与实施例一的不同在于:用于固定管钳1的机构不同,参照图8,连接部3上转动连接有转盘34,固定杆14与转盘34固定连接,转盘34与固定杆14的转动轴线互相垂直。连接部3上设置有若干个与固定杆14相配合的卡接槽13,卡接槽13开口处设有用于防止固定杆14脱出的卡块,卡接槽13沿钳柄1的运动路径分布于连接部3上。固定杆14与转盘34转动连接,通过钳柄1与转盘34的转动可以使钳柄1方便快捷地卡入或脱离卡接槽13。通过转盘34与连接部3的转动,可以带动卡钳转动至与不同卡接槽13对正的位置,进而使钳柄1可以灵活地切换于不同的卡接槽13内。当使用管钳将连接部3转动至极限位置,即钳柄1与墙壁或其他结构抵接位置。将钳柄1从卡接槽13内滑出,钳柄1与连接部3解除卡接状态,反向转动转盘34带动钳柄1反方向转动后再次将钳柄1滑入卡接槽13,管钳即可获得继续向所需方向转动的空间。有助于减少管钳在管道上固定和拆卸的次数,提高管钳转动管道的工作效率。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。