无级变速输出力矩连续调整的传动方法及装置
文献发布时间:2023-06-19 09:38:30
技术领域
本发明涉及一种用于无级变速且输出力矩可连续调整的传动方法及装置,特别是适用于机器人关节的柔顺驱动,属于牵曳传动技术领域。
背景技术
牵曳传动是靠两传动体之间的一层油膜(牵曳油)传递动力,可用于传递汽车发动机的动力,各种定速比和变速比的牵曳传动装置已应用于各个领域。哈尔滨工业大学学报第27卷第5期(1995年10月)公开的《流变润滑理论在牵曳传动中的应用》将流变润滑理论应用于牵曳传动中,如图1,输入轴和输出轴均由各自的轴承支撑在基体内,通过基体上设置的油孔由外部向基体内提供牵曳油,并在输出轴的支撑轴承一侧设置预紧弹簧。输出轴的支撑轴承上带有特制的保持架,输入轴的一端与该特制保持架连接。当输入轴转动时带动特制保持架转动并推动保持架内的钢球运动,在预紧弹簧提供的轴向预紧力的作用下,输出轴支撑轴承的内圈与钢球之间产生牵曳力,若牵曳油供给充分,则滚动体(钢球)与内圈之间形成一层弹流油膜,滚动体与内圈之间的牵曳力正是这层弹流油膜作用在接触副表面上剪应力的总和。但是,滚动体与内外圈滚道的接触状态不一定是全膜润滑状态,也可以是边界摩擦状态(即边界润滑)。若滚动体与内圈之间不能形成全膜弹流润滑,则牵曳力是滚动体与内圈之间处于边界摩擦的摩擦力。该牵曳力驱动内圈和输出轴转动,实现动力传递。
但是,上述流变润滑牵曳传动的预紧是弹簧预紧,在动力传输过程中预紧力是不可调的,因而不能在工作过程中实时调节最大输出力矩,无法实现无级变速。
发明内容
针对现有牵曳传动技术存在的不足,本发明以角接触滚动轴承为动力传递的基本单元,提供一种能够实现无级变速,输出力矩可连续调整的结构尺寸小的无级变速输出力矩连续调整的传动方法,以及实现该方法的装置。
本发明的无级变速输出力矩连续调整的传动方法,是:
输入轴由成对使用的角接触滚动轴承组合支撑,并对轴承施加可调整的轴向预紧力,两端固定正装,轴承内进行润滑(牵曳油或脂),以角接触滚动轴承作为动力传递的基本单元,其中一个角接触滚动轴承中的保持架与输出轴联接;当传递动力时,需对输入轴支撑轴承(成对使用的两个角接触滚动轴承)施加轴向预紧力。当输入轴转动时,在预紧力作用下支撑轴承的滚动体与内外圈滚道之间产生牵曳力,牵曳力驱动支撑轴承的滚动体做行星运动(自转并沿轴承滚道公转),滚动体的公转驱动保持架转动,实现行星减速传动,输出轴在其联接的保持架带动下转动,实现动力传递;根据输出轴的输出力矩需求,通过调节支撑轴承的轴向预紧力大小调节输出轴的输出力矩,随着支撑轴承轴向预紧力的变化,滚动体和内圈滚道之间表现为滚动接触或滑滚接触,滑滚接触的滑动率越高,输出轴转速越低,实现无级变速;当支撑轴承的轴向预紧力连续变化,则输出轴的最大输出力矩连续变化。
实现上述方法的无级变速输出力矩连续调整的传动装置,采用以下技术方案:
该传动装置,包括输入轴、基体和输出轴,输入轴通过第一轴承和第二轴承安装在基体内,第一轴承或第二轴承的外侧设置有预紧力调整控制单元,输出轴与第二轴承中的保持架联接。第一轴承和第二轴承的外圈与基体周向固定,内圈与输入轴固定;第一轴承和第二轴承为成对使用的角接触滚动轴承组合(如角接触球轴承、圆锥滚子轴承等),并通过牵曳油或脂进行润滑,两端固定正装。
所述输出轴通过滚动轴承支承并安装在基体内,滚动轴承为深沟球轴承。
所述预紧力调整控制单元采用压电晶体或液压系统,以实现角接触轴承组合的轴向预紧力可调。
当输入轴转动时,第一轴承和第二轴承的内圈随输入轴一起转动,在预紧力调整控制单元提供的轴向预紧力的作用下,第一轴承和第二轴承的滚动体与内外圈滚道之间产生牵曳力,牵曳力驱动轴承的滚动体自转,并沿轴承滚道公转,滚动体做行星运动,做行星运动的滚动体驱动保持架转动,实现行星减速传动。第二轴承中的特制保持架带动输出轴转动,实现动力传递。根据输出轴的输出力矩需求,通过预紧力调整控制单元,调节第一轴承和第二轴承组合(角接触轴承组合)的轴向预紧力大小,从而调节输出轴的输出力矩。当轴向预紧力恒定时,输出轴的最大输出力矩恒定,实现最大力矩的恒力矩输出。随着第一轴承和第二轴承组合轴向预紧力的变化,滚动体和内圈滚道之间可以表现为滚动接触或滑滚接触,滑滚接触的滑动率越高,输出轴转速越低,实现无级变速。当第一轴承和第二轴承组合的轴向预紧力连续变化,则输出轴输出力矩连续变化,实现动力传递的软启动或柔顺驱动。
本发明通过预紧力调整控制单元实现角接触轴承的智能预紧,轴向预紧力是可控的,可以根据输出力矩需求,进行预紧力大小的反馈控制,要求输出力矩大,就加大预紧力,反之减小。随轴向预紧力的变化,做行星运动的滚动体与内圈滚道之间可以呈现为纯滚动和滑滚接触,实现了输出轴输出力矩的连续调节和无级变速,具体可以实现以下工作状态:
1.输出轴转速为零,力矩恒定;
2.输出轴转速确定,力矩恒定;
3.输出轴转速为零,输出力矩从零连续增大,实现软启动;
4.输出力矩逐渐减小,转速逐渐减小。
附图说明
图1是现有流变润滑牵曳传动的结构原理示意图。
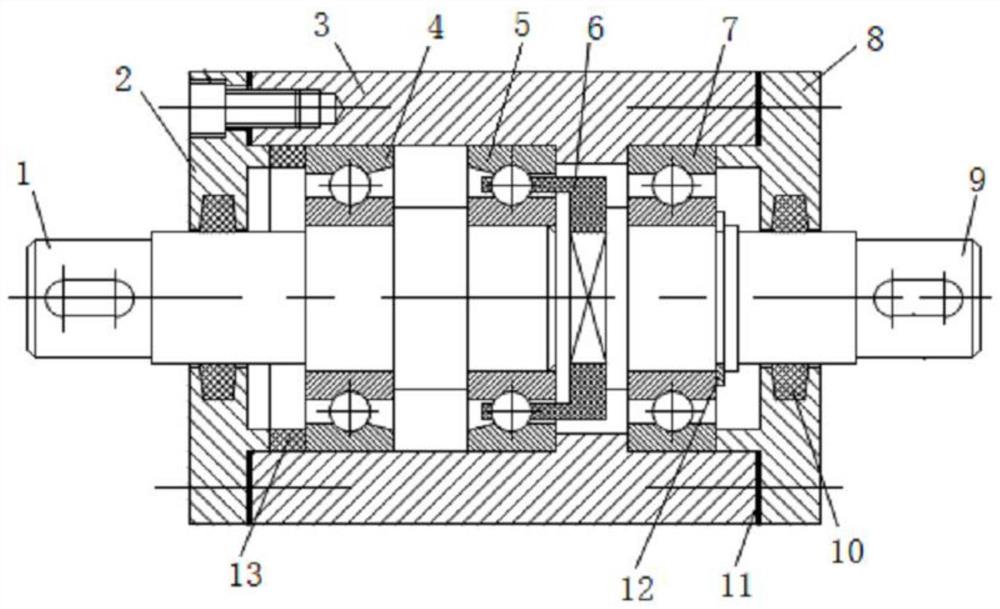
图2是本发明中无级变速输出力矩连续调整的传动装置的结构示意图。
图3是本发明中传动装置的另一种结构示意图。
图中:1.输入轴,2.前端盖,3.基体,4.第一轴承,5.第二轴承,6.保持架,7.第三轴承,8.后端盖,9.输出轴,10.密封圈,11.垫片,12.挡圈,13.预紧力调整控制单元。
具体实施方式
本发明无级变速输出力矩连续调整的传动装置的结构如图2所示,包括输入轴1、基体3和输出轴9。输入轴1通过第一轴承4和第二轴承5安装在基体3内,第一轴承4和第二轴承5为成对使用的角接触轴承组合,采用两端固定正装,牵曳油或脂润滑,以角接触滚动轴承作为动力传递的基本单元,如角接触球轴承、圆锥滚子轴承等。第一轴承4和第二轴承5的外圈与基体3周向固定,内圈与输入轴1固定。第一轴承4和第二轴承5的滚动体与内外圈之间通过牵曳油形成润滑油膜。第二轴承5靠近输出轴9,其保持架6与现有技术一样也为特制保持架,该特制保持架上设置有联接输出轴9的联接结构。第一轴承4的外侧设置有预紧力调整控制单元13。也可如图3所示,预紧力调整控制单元13设置在第二轴承5的外侧。输出轴9通过第三轴承7安装在基体3内,并通过弹性挡圈12轴向固定,第三轴承7为深沟球轴承。基体3的两端分别设置有前端盖2和后端盖8,基体3与前端盖2和后端盖8之间均设置有调整垫片11。输入轴1伸出前端盖2,输出轴9伸出后端盖8,输入轴1与前端盖2之间以及输出轴9与后端盖8之间均设置有密封圈10。
预紧力调整控制单元13可以采用液压系统,通过液压力对轴承外圈轴向位移进行预紧,通过控制液压油的压力改变预紧力的大小。
预紧力调整控制单元13也可以采用压电晶体,根据压电晶体的电致伸缩效应,对压电晶体施加电场,晶体将在轴向产生机械变形,当外加电场变化后,该变形也随之变化。通过压电晶体的形变对第一轴承4或第二轴承5产生预紧力,可改变施加电场的大小以改变预紧力的大小。
通过预紧力调整控制单元13实现智能预紧或伺服控制预紧,预紧力是可控的,可以根据输出力矩或转速的需求,进行反馈控制预紧力的大小。要求输出力矩大,就加大预紧力,反之减小。
上述传动装置的运行过程如下所述。
本发明与图1中的现有技术不同,预紧力调整控制单元13提供的预紧力是作用在输入轴1的支承轴承组合上(图1中预紧力是作用在输出轴上),首先由输入轴1带动第二轴承5中的滚动体做行星运动,再由滚动体带动特制保持架6转动,最后由保持架6带动输出轴9转动(图1中是由输入轴带动特制保持架转动,保持架再带动轴承中的钢球公转,在预紧弹簧作用下,钢球再通过牵曳力带动输出轴转动)。
当输入轴1转动时,第一轴承4和第二轴承5(角接触轴承)的内圈随输入轴1一起转动,在预紧力调整控制单元13提供的轴向预紧力的作用下,第一轴承4和第二轴承5的滚动体与内圈滚道之间通过牵曳油产生牵曳力,牵曳力驱动轴承的滚动体自转,并沿轴承滚道公转,滚动体做行星运动,做行星运动的滚动体驱动第二轴承5中的特制保持架6转动,再由特制保持架6带动输出轴9转动,实现动力传递。根据输出轴9的输出力矩需求,通过预紧力调整控制单元,调节第一轴承4和第二轴承5形成的角接触轴承组合的轴向预紧力大小,从而调节输出轴9的输出力矩。输出轴9转速为零,则力矩恒定;输出轴9转速确定,力矩恒定;输出轴9转速为零,输出力矩从零连续增大,实现软启动;输出力矩逐渐减小,转速逐渐减小。
1.当轴向预紧力恒定时,输出轴9的输出力矩恒定,实现恒力矩输出。
2.随着角接触轴承组合轴向预紧力的变化,滚动体和内圈滚道之间可以表现为滚动接触或滑滚接触,滑滚接触的滑动率越高,输出轴转速越低,实现无级变速。
3.当角接触轴承组合的轴向预紧力连续变化,则输出轴9的输出力矩连续变化,实现动力传递的软启动或柔顺驱动。
本发明的传动装置特别适用于机器人关节的柔顺驱动。
- 无级变速输出力矩连续调整的传动方法及装置
- 用于无级变速传动装置的电子控制器及无级变速传动装置的控制方法