基于无人机平台的建筑物损伤判读系统
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及检测设备领域,具体为一种基于无人机平台的建筑物损伤判读系统。
背景技术
随着我国经济的持续发展,房屋、公路、桥梁等建筑物都呈现出爆炸式增长趋势。随着这些建筑物的数量持续增长,使用过程中各种问题也不断涌现,建筑物结构在复杂的使用环境中会不断地受到自然环境的侵蚀和各种灾害因素的作用,这会导致建筑物产生不同程度的损伤。当损伤积累到一定程度时,就会对建筑物结构的安全性造成巨大威胁,因此需要进行有效的建筑物损伤位置和损伤程度的识别。针对这些建筑物的结构健康监测成为工业领域里的一个重要问题。
建筑物结构健康监测指的是对工程结构的损伤判定及其特征化的策略和过程,而针对混凝土的结构健康监测正是这其中的一个重要领域。由混凝土构成的建筑物表面往往会形成不同程度的裂缝,除了极端自然灾害,裂缝形成原因主要有三种:首先是由于长时间负载过重使得应力不均产生裂缝问题。其次是受温度变化的影响,混凝土的结构会在曝晒和雨雪天气下变形,且空气和雨水的长期侵蚀致使其结构腐蚀,承载能力降低容易引起裂缝。再者施工材料以及施工技术也直接决定了建筑物的质量。这些裂缝对房屋、公路、桥梁的使用寿命及安全会产生严重影响,一旦发生坍塌事故将造成不可挽回的生命、经济损失。
传统的建筑损伤识别使用人力进行现场测量,不仅风险较大,而且非专业人士无法获取更多信息。少部分场合采用无人机进行拍摄,但仅限于拍摄图像而没有进行后续的图像处理或人工判读。除此以外,检测精度也随各检测人员的经验技术而异,具有很大的不确定性。
发明内容
本发明针对现有技术存在的问题,提供了一种基于无人机平台的建筑物损伤判读系统,包括:无人机、与无人机无线信号连接的控制器、与控制器无线或有线信号连接的分析装置。所述无人机上设有朝向目标建筑物的激光标记与测距装置和拍摄装置。所述控制器用于控制无人机的飞行姿态,同时接收激光标记与测距装置发送的标记与测距信息、拍摄装置发送的影像信息,并将接收的标记与测距信息、影像信息发送至分析装置。所述分析装置根据接收的标记与测距信息进行建筑物建模分析、建筑物模型对比分析,得到分析结果A1。所述分析装置根据接收的影像信息进行建筑物外表分析,得到分析结果A2。
进一步的,所述建筑物外表分析包括:
a)图像载入与信息浏览模块
图像载入与信息浏览模块提供无人机拍摄图像的载入显示和地理位置信息的显示操作,并提供目标提取的操作窗口。
b)图像增强处理模块
采用直方图均衡化方法对影像信息进行增强,对M×N的图像进行中值滤波处理,并利用灰度统计和直方图均衡化增强图像信息。
c)图像判读与处理模块
对建筑物影像信息进行逐帧分析,获取其中图像区域属性发生明显变化的地方,进行图像滤波-图像边缘增强-图像边缘检测-图像提取操作。
进一步的,所述图像提取包括:
A1.对于图像f(x,y),设中心边缘点为算子G
A2.得到x,y方向的梯度为:
将
A3.反应图像点(x,y)处边缘强度M(x,y)和法向矢量α(x,y)的计算式为:
A4.当图像的一个像素点满足以下三个条件时即可被认为是边缘点:
(a)此点的边缘强度大于沿其梯度方向的两个相邻像素点的边缘强度。
(b)与此点梯度方向上相邻两点的方向差小于45度。
(c)以此点为中心的3x3邻域中的边缘强度极大值小于某个阈值。
A5.对边缘提取后的图像进行计算处理:
激光标记装置在拍摄图像中标记位置I(x1,y1)和I(x2,y2),此时两标记点之间的像素距离为r,激光标记点实际安装距离为R,对图像传感器进行标定后的镜头焦距为f,则根据几何关系可以得到:
式中:
H=Rf/r即为无人机相对建筑物表面的垂直距离。
激光测距装置直接给出的测距信息为D,当D=H时,有线性关系:
式中:r——激光标记点像素距离。
l——损伤长度像素距离。
w——损伤宽度像素距离。
L——损伤长度实际距离。
W——损伤宽度实际距离。
R——激光标记点安装距离。
由此可得出损伤大小的最大实际长度和宽度:
A6.输出分析结果A2:
将全部边缘点连线后形成建筑物损伤二维图形信息,同时根据计算得到的L和W得到损伤图形的实际长度和实际宽度,作为分析结果A2。
进一步的,所述建筑物建模分析包括:
C1.当前无人机激光标记与测距装置在拍摄图像中标记位置I(x1,y1)和I(x2,y2),此时两标记点之间的像素距离为r。激光标记点实际安装距离为R,对图像传感器进行标定后的镜头焦距为f,则根据几何关系可以得到:
式中:
得到当前无人机相对建筑物表面的垂直距离Hn。
C2.根据无人机预设飞行轨迹和Hn,沿无人机预设飞行轨迹,将Hn堆叠和连线后得到建筑物当前扫面面的3D模型U2。
进一步的,所述建筑物模型对比分析包括:
D1.获取建筑物当前扫描面的3D模型U1。
D2.将U1与U2放于相同坐标系内,并基于预设参考点缩放至相同大小。
D3.对比U2的全部检测点与U1的关系,对其中误差值超出预设值的部分记为Wn。
D4.连接相邻Wn得到分析结果A1,所述分析结果A1为建筑物损伤三维模型信息。
进一步的,所述基于无人机平台的建筑物损伤判读系统还包括:定位装置,所述无人机底部设有第一定位球。所述定位装置可拆卸固定在地面上,其顶部设有第二定位球。所述第一定位球和第二定位球为受控360°旋转的球体,并在球面上分别设有激光发射器和激光反射器。
进一步的,所述控制器包括:无人机绝对位置控制。所述无人机绝对位置控制包括:
B1.控制第一定位球与第二定位球处于预设初始位置,并记录此时第一定位球与第二定位球上激光发射器相对预设固定点的朝向信息,分别记为C0和D0,控制第一定位球通过激光发射器向第二定位球的激光反射器发射脉冲激光,并基于TOF技术计算得到第一定位球和第二定位球之间的距离,记为L10。控制第二定位球通过激光发射器向第一定位球的激光反射器发射脉冲激光,并基于TOF技术计算得到第一定位球和第二定位球之间的距离,记为L20。当C0和D0没有相向或L10和L20不相等时,调整无人机的相对位置,使得C0与D0处于相向状态且L10=L20。
B2.控制器控制无人机按照预设飞行轨迹进行飞行,对建筑物进行扫描测距。此时,第一定位球通过激光发射器向第二定位球的激光反射器发射脉冲激光,并基于TOF技术计算得到第一定位球和第二定位球之间的距离,记为L1n,同时记录当前第一定位球的朝向信息Cn。同时,第二定位球通过激光发射器向第一定位球的激光反射器发射脉冲激光,并基于TOF技术计算得到第一定位球和第二定位球之间的距离,记为L2n,同时记录当前第一定位球的朝向信息Dn。
B3.当Cn和Dn没有相向时,调整无人机的相对位置,使得Cn与Dn处于相向状态。当L1n与L2n不等时,判断两者的差值是否超出预设阈值,如超出则发出故障报警,如未超出则取两者的平均值作为无人机与定位装置的实时距离信息Ln。
B4.以第二定位球的球心为原点建立三维坐标系,根据Cn和Dn和Ln,得到无人机相对原点的实时位置信息,并与当前预设飞行轨迹对比。根据对比结果对无人机的位置进行调整,使其处于飞行轨迹上。
进一步的,围绕目标建筑物设有至少3个定位装置。此时控制器包括:无人机检测边缘控制。所述无人机检测边缘控制包括:
E1.以全部定位装置的中心点为原点建立三维坐标系。所有定位装置的第二定位球在其检测范围内进行全范围扫描,得到三维坐标系内的扫描域Yn。
E2.将相邻定位装置的扫描域Yn重复的部分标记为Xn,以Xn竖直方向的中垂面为分界面。
E3.计算预设飞行轨迹穿过分界面的点与对应的两个定位装置的朝向信息Jn和距离信息Pn。
E4.当无人机达到Jn和Pn时,控制第一定位球从与当前第二定位球的对应关系,转向至与该点对应的另一第二定位球进行对应。
进一步的,对比分析结果A1和分析结果A2:对其中相同或边缘值小于预设的部分判定为表面损伤,并发出损伤标记报警。对其中存在分析结果A1而不存在分析结果A2的部分,判定为建筑缺失,并发出建筑缺失标记报警。对其中存在分析结果A2而不存在分析结果A1的部分,判定为待观察项,并将该区域及其周边预设范围大小的区域一并发送至工作人员查看并进行人工判断。
本发明至少具有以下有益效果之一:
1.本发明不仅可以通过搭载激光标记与测距装置,经过调整测距信息得到正立面图像,通过建筑物外表分析自动解算损伤形状、损伤最大长度和宽度等二维损伤图形信息。还可以通过建筑物建模分析、建筑物模型对比分析得到建筑物三维损伤模型信息。
2.本发明不仅可以得到由于建筑物破损得到的损伤信息,还可以根据预设模型得到建筑缺失的损伤信息。
附图说明
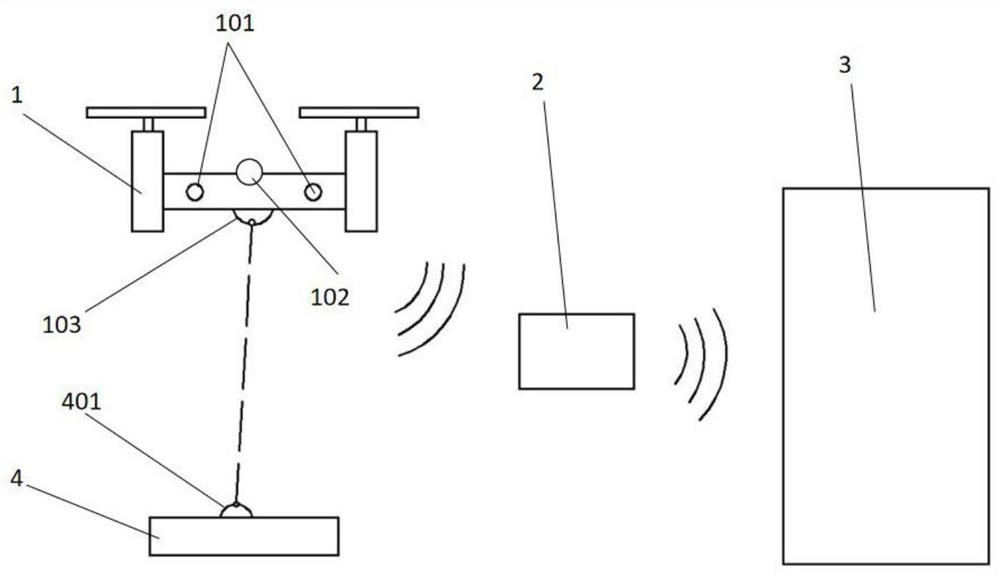
图1为本发明基于无人机平台的建筑物损伤判读系统的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
实施例1
一种基于无人机平台的建筑物损伤判读系统,如图1所示,包括:无人机1、与无人机1无线信号连接的控制器2、与控制器2无线或有线信号连接的分析装置3。所述无人机1上设有朝向目标建筑物的激光标记与测距装置101和拍摄装置102。所述控制器2用于控制无人机1的飞行姿态,同时接收激光标记与测距装置101发送的标记与测距信息、拍摄装置102发送的影像信息,并将接收的标记与测距信息、影像信息发送至分析装置3。所述分析装置3根据接收的标记与测距信息进行建筑物建模分析、建筑物模型对比分析,得到分析结果A1。所述分析装置3根据接收的影像信息进行建筑物外表分析,得到分析结果A2。
所述建筑物外表分析包括:
a)图像载入与信息浏览模块
图像载入与信息浏览模块提供无人机1拍摄图像的载入显示和地理位置信息的显示操作,并提供目标提取的操作窗口。
b)图像增强处理模块
采用直方图均衡化方法对影像信息进行增强,对M×N的图像进行中值滤波处理,并利用灰度统计和直方图均衡化增强图像信息。
c)图像判读与处理模块
对建筑物影像信息进行逐帧分析,获取其中图像区域属性发生明显变化的地方,进行图像滤波-图像边缘增强-图像边缘检测-图像提取操作。
进一步的,所述图像提取包括:
A1.对于图像f(x,y),设中心边缘点为算子G
A2.得到x,y方向的梯度为:
将
A3.反应图像点(x,y)处边缘强度M(x,y)和法向矢量α(x,y)的计算式为:
A4.当图像的一个像素点满足以下三个条件时即可被认为是边缘点:
(a)此点的边缘强度大于沿其梯度方向的两个相邻像素点的边缘强度。
(b)与此点梯度方向上相邻两点的方向差小于45度。
(c)以此点为中心的3x3邻域中的边缘强度极大值小于某个阈值。
A5.对边缘提取后的图像进行计算处理:
激光标记装置在拍摄图像中标记位置I(x1,y1)和I(x2,y2),此时两标记点之间的像素距离为r,激光标记点实际安装距离为R,对图像传感器进行标定后的镜头焦距为f,则根据几何关系可以得到:
式中:
H=Rf/r即为无人机相对建筑物表面的垂直距离。
激光测距装置直接给出的测距信息为D,当D=H时,有线性关系:
式中:r——激光标记点像素距离。
l——损伤长度像素距离。
w——损伤宽度像素距离。
L——损伤长度实际距离。
W——损伤宽度实际距离。
R——激光标记点安装距离。
由此可得出损伤大小的最大实际长度和宽度:
A6.输出分析结果A2:
将全部边缘点连线后形成建筑物损伤二维图形信息,同时根据计算得到的L和W得到损伤图形的实际长度和实际宽度,作为分析结果A2。
所述建筑物建模分析包括:
C1.当前无人机(1)激光标记与测距装置(101)在拍摄图像中标记位置I(x1,y1)和I(x2,y2),此时两标记点之间的像素距离为r。激光标记点实际安装距离为R,对图像传感器进行标定后的镜头焦距为f,则根据几何关系可以得到:
式中:
得到当前无人机相对建筑物表面的垂直距离Hn。
C2.根据无人机预设飞行轨迹和Hn,沿无人机预设飞行轨迹,将Hn堆叠和连线后得到建筑物当前扫面面的3D模型U2。
所述建筑物模型对比分析包括:
D1.获取建筑物当前扫描面的3D模型U1。
D2.将U1与U2放于相同坐标系内,并基于预设参考点缩放至相同大小。
D3.对比U2的全部检测点与U1的关系,对其中误差值超出预设值的部分记为Wn。
D4.连接相邻Wn得到分析结果A1,所述分析结果A1为建筑物损伤三维模型信息。
本发明通过搭载激光标记与测距装置,经过调整测距信息得到正立面图像,通过建筑物外表分析自动解算损伤形状、损伤最大长度和宽度等二维损伤图形信息。还可以通过建筑物建模分析、建筑物模型对比分析得到建筑物三维损伤模型信息。同时,本发明不仅可以得到由于建筑物破损得到的损伤信息,还可以根据预设模型得到建筑缺失的损伤信息。
实施例2
基于实施例1所述基于无人机平台的建筑物损伤判读系统,如图1所示,所述基于无人机平台的建筑物损伤判读系统还包括:定位装置4,所述无人机1底部设有第一定位球103。所述定位装置4可拆卸固定在地面上,其顶部设有第二定位球401。所述第一定位球103和第二定位球401为受控360°旋转的球体,并在球面上分别设有激光发射器和激光反射器。
所述控制器2包括:无人机绝对位置控制。所述无人机绝对位置控制包括:
B1.控制第一定位球103与第二定位球401处于预设初始位置,并记录此时第一定位球103与第二定位球401上激光发射器相对预设固定点的朝向信息,分别记为C0和D0,控制第一定位球103通过激光发射器向第二定位球401的激光反射器发射脉冲激光,并基于TOF技术计算得到第一定位球103和第二定位球401之间的距离,记为L10。控制第二定位球(401)通过激光发射器向第一定位球103的激光反射器发射脉冲激光,并基于TOF技术计算得到第一定位球103和第二定位球401之间的距离,记为L20。当C0和D0没有相向或L10和L20不相等时,调整无人机1的相对位置,使得C0与D0处于相向状态且L10=L20。
B2.控制器2控制无人机按照预设飞行轨迹进行飞行,对建筑物进行扫描测距。此时,第一定位球103通过激光发射器向第二定位球401的激光反射器发射脉冲激光,并基于TOF技术计算得到第一定位球103和第二定位球401之间的距离,记为L1n,同时记录当前第一定位球103的朝向信息Cn。同时,第二定位球401通过激光发射器向第一定位球103的激光反射器发射脉冲激光,并基于TOF技术计算得到第一定位球103和第二定位球401之间的距离,记为L2n,同时记录当前第一定位球103的朝向信息Dn。
B3.当Cn和Dn没有相向时,调整无人机1的相对位置,使得Cn与Dn处于相向状态。当L1n与L2n不等时,判断两者的差值是否超出预设阈值,如超出则发出故障报警,如未超出则取两者的平均值作为无人机1与定位装置4的实时距离信息Ln。
B4.以第二定位球401的球心为原点建立三维坐标系,根据Cn和Dn和Ln,得到无人机1相对原点的实时位置信息,并与当前预设飞行轨迹对比。根据对比结果对无人机的位置进行调整,使其处于飞行轨迹上。
经过上述控制分析,可以使得无人机的飞行路线总是维持在预设飞行轨迹上,从而避免由于无人机飞离预设飞行路线导致获取的不合理的距离信息,从而导致建立了错误结构的建筑模型,进而导致建筑物模型对比分析获得错误的分析结果,导致误判。
实施例3
基于实施例1所述基于无人机平台的建筑物损伤判读系统,围绕目标建筑物设有至少3个定位装置4。此时控制器2包括:无人机检测边缘控制。所述无人机检测边缘控制包括:
E1.以全部定位装置4的中心点为原点建立三维坐标系。所有定位装置4的第二定位球401在其检测范围内进行全范围扫描,得到三维坐标系内的扫描域Yn。
E2.将相邻定位装置4的扫描域Yn重复的部分标记为Xn,以Xn竖直方向的中垂面为分界面。
E3.计算预设飞行轨迹穿过分界面的点与对应的两个定位装置4的朝向信息Jn和距离信息Pn。
E4.当无人机达到Jn和Pn时,控制第一定位球103从与当前第二定位球401的对应关系,转向至与该点对应的另一第二定位球401进行对应。
多角度扫描可以一次性获得建筑的全方位扫描,从而建立建筑物的整体三维模型,从而提高工作效率。通过本实施例无人机检测边缘控制可以解决无人机在相邻定位装置4扫描域重复的区域判断混乱的问题,以及无法及时从与一个定位装置4的定位关系上切换至相邻另一个定位装置4的定位关系的问题。
实施例4
基于实施例1所述基于无人机平台的建筑物损伤判读系统,对比分析结果A1和分析结果A2:对其中相同或边缘值小于预设的部分判定为表面损伤,并发出损伤标记报警。对其中存在分析结果A1而不存在分析结果A2的部分,判定为建筑缺失,并发出建筑缺失标记报警。对其中存在分析结果A2而不存在分析结果A1的部分,判定为待观察项,并将该区域及其周边预设范围大小的区域一并发送至工作人员查看并进行人工判断。此时,可以根据分析结果输出建筑物可能的损伤情况,以及可能出现的分析错误,一方面尽可能降低由于主观判断导致的判断不稳定性,另一方面也有效降低了可能的分析错误问题。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 基于无人机平台的建筑物损伤判读系统
- 一种基于动态多目标预测的空间碎片撞击损伤判读方法