应用于悬浮式捕鱼灯的控制系统
文献发布时间:2023-06-19 12:10:19
技术领域
本申请涉及捕鱼灯的领域,尤其是涉及一种应用于悬浮式捕鱼灯的控制系统。
背景技术
捕鱼灯是光诱渔业的重要装备之一,起到诱鱼和捕鱼的作用。
相关技术中,人们通常将捕鱼灯用绳子绑住,再由工作人员手动拉住绳子,并将捕鱼灯打开后,通过绳子将捕鱼灯放置到水中,以使捕鱼灯吸引鱼群。
针对上述中的相关技术,在捕鱼灯放入到水中后,需要由工作人员通过手动控制绳子的长度来调整捕鱼灯在水中的位置,较为麻烦。
发明内容
为了提高对捕鱼灯在水中位置控制的便捷性,本申请提供了一种应用于悬浮式捕鱼灯的控制系统。
本申请提供的一种应用于悬浮式捕鱼灯的控制系统采用如下的技术方案:
一种应用于悬浮式捕鱼灯的控制系统,包括捕鱼灯本体,所述捕鱼灯本体的顶部设置有电机,所述电机的输出轴上同轴连接有螺旋桨;
还包括:
声呐发声器,用于向电机发送声波信号;
声呐接收器,设置于所述电机上并接收声波信号;
控制器,设置于所述电机上并耦接于所述声呐接收器,于所述声呐接收器接收到声波信号时控制电机转动,以使螺旋桨转动并带动捕鱼灯本体运动。
通过采用上述技术方案,将捕鱼灯本体放入到水中后,声呐发声器开始发送声波信号,声呐接收器接收声波信号并传送至控制器,控制器自动控制电机转动,以通过螺旋桨带动捕鱼灯本体在水中运动,进而实现捕鱼灯本体在水中位置的自动控制,更加便捷。
可选的,还包括:
存储模块,耦接于所述控制器并存储有对应声波信号发声频率范围的引鱼距离,所述引鱼距离为捕鱼灯本体的上表面与水面的距离;
感应模块,耦接于所述控制器并用于感应引鱼距离;
所述控制器接收声波信号控制所述电机加速转动,以使螺旋桨转动并带动捕鱼灯本体做上升或下降运动,直至感应模块感应到引鱼距离达到声波信号所对应引鱼距离时,所述控制器控制电机匀速转动,以保持捕鱼灯本体在水中的位置。
通过采用上述技术方案,当需要将捕鱼灯本体放置到水中的指定位置时,可通过声呐发声器发出对应频率的声波信号,根据存储模块所存储的对应声波信号的引鱼距离,由控制器控制电机转动,以使螺旋桨上升或下降运动,直至捕鱼灯本体运动至指定位置,有利于提高对捕鱼灯本体位置控制的精确性。
可选的,所述感应模块所感应的引鱼距离与所述声波信号所对应的引鱼距离之间的距离逐渐减小时,所述控制器控制所述电机的转速逐渐减小,直至电机的转速达到匀速转动。
通过采用上述技术方案,当螺旋桨带动捕鱼灯本体运动时,可保证捕鱼灯本体是逐渐运动至指定位置,以减少出现电机转速过快而导致捕鱼灯本体运动至超过指定位置的情况。
可选的,还包括:
声波发送模块,设置于所述捕鱼灯本体内并耦接于所述控制器,于所述电机带动所述捕鱼灯本体运动至声波信号所对应引鱼距离位置时,向水中间隔相同时间发送多次探测声波;
声波检测模块,耦接于所述声波发送模块并用于检测所发送的探测声波从发出到返回的时长,记为探测时长;
于所述声波检测模块检测到探测时长随探测声波发送次数的增加而减少时,所述控制器控制电机加速转动,并使螺旋桨带动捕鱼灯本体做上升运动。
通过采用上述技术方案,当捕鱼灯本体开始工作吸引鱼群时,可通过声波发送模块向水中发送声波,声波在接触到鱼群后返回,并通过声波检测模块记录探测时长,直至声波的探测时长逐渐减少时,则表示鱼群向捕鱼灯本体靠拢,此时使得螺旋桨带动捕鱼灯本体向上运动以吸引鱼群继续靠近,进而以便于后续对鱼群的捕捞。
可选的,所述电机加速转动使螺旋桨带动捕鱼灯本体上升运动,当螺旋桨凸出水面而捕鱼灯本体持续上升时,至少留有一半长度的捕鱼灯本体在水中。
通过采用上述技术方案,当捕鱼灯本体持续上升运动时,将至少一半长度捕鱼灯本体留在水中,以保证对鱼群的吸引。
可选的,预设有捕鱼灯本体从引鱼距离向上运动直至螺旋桨凸出水面过程中的若干检测时间段;
所述控制器每经过一次检测时间段控制电机恢复至匀速运动,且控制所述声波发送模块向水中间隔相同时间发送多次探测声波;
所述声波检测模块于所述声波发送模块每次在检测时间段发送探测声波后检测探测时长;
在检测时间段时,当所述声波检测模块检测的探测时长同样随探测声波发送次数的增加而减少时,所述控制器控制电机加速转动,并使螺旋桨带动捕鱼灯本体做上升运动直至下一个检测时间段;
反之,当所述声波检测模块检测的探测时长随探测声波发送次数的增加而增加或保持不变时,所述控制器控制电机保持匀速转动,所述声波发送模块持续间隔相同时间发送探测声波,直至声波检测模块检测的探测时长重新随探测声波发送次数的增加而减少时,所述控制器控制电机加速转动。
通过采用上述技术方案,当捕鱼灯本体向上运动时,通过设置若干检测时间段,并在每经过一次检测时间段时,通过声波发送模块及声波检测模块再次进行鱼群靠拢的检测,有利于时刻保证鱼群是处于靠拢的状态。
可选的,还包括:
电源模块,耦接于所述控制器并用于给电机供电;
电量监测模块,耦接于所述电源模块并于捕鱼灯本体开始从引鱼距离向上运动时对电源模块所存储的电量进行监测。
通过采用上述技术方案,通过设置电量监测模块,以对电源模块所存储的电量进行监测,以便于保持电机的顺利工作。
可选的,所述电量监测模块包括第一电量统计单元及第二电量统计单元;
第一电量统计单元,用于统计捕鱼灯本体在每一次检测时间段内,声波检测模块所发送的探测声波的探测时长,随探测声波发送次数的增加而减少过程中所使用的电量;
第二电量统计单元,用于统计捕鱼灯本体在每一次检测时间段内,声波检测模块所发送的探测声波的探测时长,随探测声波发送次数的增加而增加或保持不变,直至声波检测模块检测的探测时长重新随探测声波发送次数的增加而减少过程中所使用的电量;
预设有电量使用上限阈值,所述第一电量统计单元所统计的总电量达到电量使用上限阈值时,至多再经过一次检测时间段,所述控制器控制电机加速转动,螺旋桨转动并带动捕鱼灯本体脱离水面;
所述第二电量统计单元所统计的总电量达到电量使用上限阈值时,所述控制器直接控制电机加速转动,螺旋桨转动并带动捕鱼灯本体脱离水面。
通过采用上述技术方案,通过设置第一电量统计单元及第二电量统计单元,以对在检测时间段内,电机所消耗的电量进行统计,并在对应电量统计单元所统计的电量达到电量使用上限阈值时,电机加速使得螺旋桨带动捕鱼灯脱离水面,以便于工作人员及时收取,以防电量使用完毕后捕鱼灯下沉至水中。
综上所述,本申请包括以下至少一种有益技术效果:
1.通过设置声呐发声器、声呐接收器及控制器,控制器可控制电机转动,以通过螺旋桨带动捕鱼灯本体在水中运动,以实现对捕鱼灯本体在水中位置的自动控制,更加方便;
2.通过设置存储模块及感应模块,有利于提高对捕鱼灯本体在水中位置控制的精确性。
附图说明
图1是本申请实施例中捕鱼灯的整体结构图。
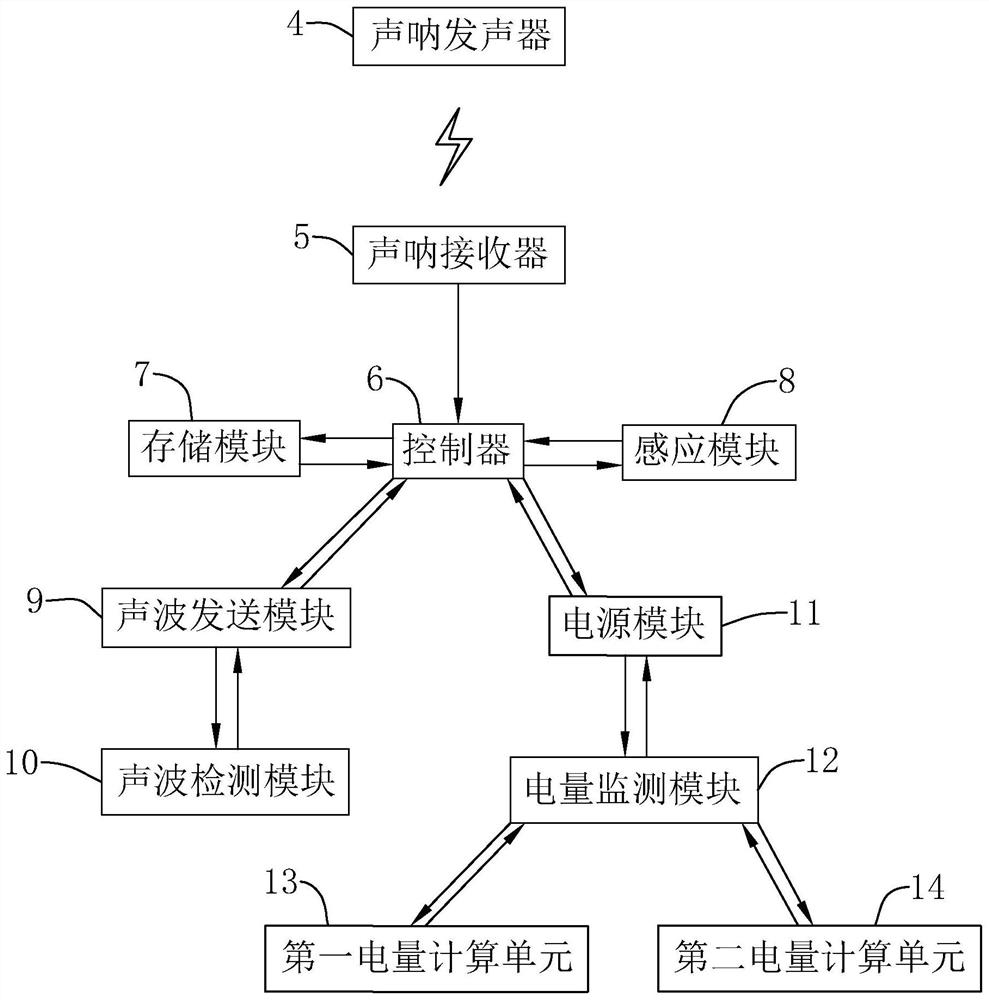
图2是本申请实施例中控制系统的原理图。
附图标记说明:1、捕鱼灯本体;2、电机;3、螺旋桨;4、声呐发声器;5、声呐接收器;6、控制器;7、存储模块;8、感应模块;9、声波发送模块;10、声波检测模块;11、电源模块;12、电量监测模块;13、第一电量统计单元;14、第二电量统计单元。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图1-2及实施例,对本申请进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本申请,并不用于限定本申请。
本申请实施例公开一种应用于悬浮式捕鱼灯的控制系统。
参照图1,应用于悬浮式捕鱼灯的控制系统包括捕鱼灯本体1,捕鱼灯本体1的顶部固定连接有电机2,电机2的输出轴背对捕鱼灯本体1,且同轴连接有螺旋桨3。
参照图1、图2,电机2上设置有声呐接收器5及耦接于声呐接收器5的控制器6,声呐接收器5还无线连接有声呐发声器4,声呐发声器4用于向声呐接收器5发送不同频率的声波信号;具体的,声呐发声器4可设置在手机端、PC机等终端上,通过红外线、蓝牙、WiFi等方式发送声波信号;声呐接收器5用于接收声波信号并传送至控制器6,此时控制器6控制电机2反向加速转动,电机2带动螺旋桨3加速转动,进而带动捕鱼灯本体1向下运动,直至捕鱼灯本体1运动至水中对应的位置后,控制器6控制电机2匀速转动,进而螺旋桨3匀速转动以使捕鱼灯本体1在水中的对应位置保持静止工作;本实施例中捕鱼灯本体1分为向水面运动的上升运动状态及远离水面运动的下降运动状态,当捕鱼本体需要进行上升运动时,控制器6控制电机2正转,当捕鱼灯本体1需要进行下降运动时,控制器6控制电机2反转。
参照图1、图2,进一步的,为提高对捕鱼灯本体1在水中位置控制的精确性,本申请还包括存储模块7及感应模块8,存储模块7耦接于控制器6并存储有对应声波信号发声频率范围的引鱼距离,引鱼距离优选为捕鱼灯本体1的上表面与水面的距离。
参照图1、图2,具体的,声波信号的单位为赫兹,本实施例中存储模块7中所存储的数据包括发声频率为1W赫兹声波信号所对应的1米捕鱼距离、2W赫兹声波信号所对应的2米捕鱼距离、8K赫兹声波信号所对应的0米捕鱼距离、5K赫兹声波信号所对应的负1米捕鱼距离等。
参照图1、图2,感应模块8耦接于控制器6并用于感应引鱼距离;控制器6接收声波信号控制电机2加速转动,以使螺旋桨3带动捕鱼灯本体1做上升或下降运动,直至感应模块8感应到引鱼距离达到声波信号所对应引鱼距离时,控制器6控制电机2匀速转动,以保持捕鱼灯本体1在水中的位置。
参照图1、图2,具体的,在捕鱼灯本体1一放入到水中时,声呐发声器4立即发送相应频率的声波信号,以声呐发声器4发出1W赫兹的声波信号为例,此时需要捕鱼灯本体1运动至引鱼距离为1米的位置,由于捕鱼灯本体1刚放入水中,距离1米的捕鱼距离需要向下运动,因此控制器6需要控制电机2做反转加速运动,以使螺旋桨3带动捕鱼灯本体1向下运动,直至捕鱼灯本体1运动至引鱼距离为1米的水下后,控制器6控制电机2匀速转动,以减少捕鱼灯本体1出现上升或下降的情况,在水中保持静止状态。
参照图1、图2,对于螺旋桨3控制捕鱼灯本体1向引鱼距离所对应的水中位置进行运动时,感应模块8同时在感应捕鱼灯本体1上表面与水面的距离,在捕鱼灯本体1运动的过程中,感应模块8所感应的距离与声波信号对应的引鱼距离所处的水中位置是逐渐减小的,在这个过程,控制器6控制电机2的转速需要逐渐减小,直至电机2的转速达到匀速转动,即捕鱼灯本体1运动至指定位置,进而可避免电机2转速过快,在捕鱼灯本体1运动到指定位置时无法及时回到匀速状态的情况。
参照图1、图2,进一步的,本申请还包括声波发送模块9及声波检测模块10,声波发送模块9设置于捕鱼灯本体1内并耦接于控制器6,于螺旋桨3带动捕鱼灯本体1运动至声波信号所对应引鱼距离位置时,向水中间隔相同时间发送多次探测声波;声波检测模块10耦接于声波发送模块9并用于检测所发送的探测声波从发出到返回的时长,并将探测声波从发出到返回的时长记为探测时长。
参照图1、图2,具体的,当捕鱼灯本体1运动至指定位置后进行发光引鱼工作后,声波发送模块9向捕鱼灯本体1的下方及周向发送声波,第一次声波发送后,需要第二次发送时,第二次声波发送后,需要第三次发送时,均需要一定的间隔时间,且间隔的时间相同,本实施例中间隔的时间优选为30S。
参照图1、图2,当声波检测模块10检测到探测时长随探测声波发送次数的增加而减少时,以声波发送次数三次为例,第二次声波发送后所统计的探测时长小于第一次,且第三次声波发送后所统计的探测时长小于第二次时,控制器6控制电机2加速正向转动,并使螺旋桨3带动捕鱼灯本体1做上升运动,以进一步吸引鱼群。
参照图1、图2,在捕鱼灯本体1上升运动时,存在螺旋桨3凸出水面且持续带动捕鱼灯本体1向上运动,并使得捕鱼灯本体1逐渐脱离水面的情况,在这个过程中,当出现捕鱼灯本体1脱离水面时,至少需要留有一半长度的捕鱼灯本体1在水中持续进行发光工作,以吸引鱼群。
参照图1、图2,进一步的,本申请还预设有捕鱼灯本体1从引鱼距离向上运动直至螺旋桨3凸出水面过程中的若干检测时间段,相邻两次检测时间段之间的时间优选为10S;控制器6每经过10S进入检测时间段后,控制电机2恢复至匀速运动,且控制声波发送模块9向水中间隔相同时间发送多次探测声波;声波检测模块10于声波发送模块9每次在检测时间段发送探测声波后检测探测时长。
参照图1、图2,具体的,控制器6开始控制电机2加速转动,捕鱼灯本体1上升时,声波发送模块9及声波检测模块10先停止工作,在经过10S后进入到检测时间段后,控制器6控制电机2重新进入均匀转动状态,捕鱼灯本体1在水中恢复静止状态,此时声波发送模块9及声波检测模块10重新工作,声波发送模块9以发送三次探测声波作为一次检测,声波检测模块10统计三次探测声波对应的探测时长。
参照图1、图2,在检测时间段中,当声波检测模块10检测的探测时长同样随探测声波发送次数的增加而减少时,即三次探测声波对应的探测时间与捕鱼灯本体1在引鱼距离位置时同样呈现依次减小的情况时,则表示鱼群有在持续向捕鱼灯本体1运动,此时控制器6控制电机2再次加速转动,并使螺旋桨3带动捕鱼灯本体1做上升运动10S直至下一个检测时间段。
参照图1、图2,在检测时间段中,当声波检测模块10检测的探测时长随探测声波发送次数的增加而增加或保持不变时,即三次探测声波对应的探测时间出现依次增加或者保持不变的情况时,需要注意的是,三次探测声波对应的探测时间只要出现一次增加或者保持不变,控制器6控制电机2均需要保持匀速转动,声波发送模块9持续间隔相同的时间发送探测声波,直至声波检测模块10检测的探测时长重新随探测声波发送次数的增加而减少时,控制器6控制电机2加速转动。
参照图1、图2,进一步的,本申请还包括电源模块11及电量监测模块12,其中电量监测模块12包括第一电量统计单元13及第二电量统计单元14;电源模块11耦接于控制器6并用于给电机2供电;电量监测模块12耦接于电源模块11并于捕鱼灯本体1开始从引鱼距离向上运动时对电源模块11所存储的电量进行监测。
参照图1、图2,第一电量统计单元13用于统计捕鱼灯本体1在每一次检测时间段内,声波检测模块10所发送的探测声波的探测时长随探测声波发送次数的增加而减少过程中所使用的电量。
参照图1、图2,具体的,在捕鱼灯本体1工作,鱼群向捕鱼灯本体1靠近,螺旋桨3带动捕鱼灯本体1向上运动时,每经过一次检测时间段,声波检测模块10需要发送多次探测声波检测鱼群是否在持续靠近,当所发送的探测声波的探测时长随探测声波发送次数的增加而减少,表示鱼群在持续靠近的过程中,第一电量统计单元13统计这个检测时间段中电机2所消耗的电量;因此检测时间段内鱼群是在持续靠近的,均由第一电量统计单元13进行电机2所消耗电量的统计。
参照图1、图2,第二电量统计单元14用于统计捕鱼灯本体1在每一次检测时间段内,声波检测模块10所发送的探测声波的探测时长随探测声波发送次数的增加而增加或保持不变,直至声波检测模块10检测的探测时长重新随探测声波发送次数的增加而减少过程中所使用的电量。
参照图1、图2,具体的,在捕鱼灯本体1工作,鱼群向捕鱼灯本体1靠近,螺旋桨3带动捕鱼灯本体1向上运动时,每经过一次检测时间段,声波检测模块10需要发送多次探测声波检测鱼群是否在持续靠近,当所发送的探测声波的探测时长随探测声波发送次数的增加而增加或保持不变时,表示鱼群并没有靠近,此时捕鱼灯本体1是在水中保持静止状态继续吸引鱼群,同时声波发送模块9持续间隔相同的时间发送探测声波,直至所发送声波的探测时长随探测声波发送次数的增加而减少时,表示鱼群开始靠近,捕鱼灯本体1继续向上运动,进入下一次检测时间段,在这个检测时间段内鱼群从没有靠近到后续重新靠近过程中,电机2所消耗的电量均由第二电量统计单元14进行统计,因此在同一次检测时间段中,第二电量统计单元14所统计的电机2耗电量肯定多于第一电量统计单元13所统计的电机2耗电量。
参照图1、图2,电源模块11内预设有电量使用上限阈值,第一电量统计单元13所统计的总电量达到电量使用上限阈值时,至多再经过一次检测时间段,控制器6控制电机2加速转动,螺旋桨3转动并带动捕鱼灯本体1脱离水面;第二电量统计单元14所统计的总电量达到电量使用上限阈值时,控制器6直接控制电机2加速转动,螺旋桨3转动并带动捕鱼灯本体1脱离水面。
参照图1、图2,具体的,由于第二电量统计单元14所统计的电机2耗电量多于第一电量统计单元13,进而当电源模块11内所消耗的电量达到电量使用上限阈值时,电源模块11中剩余的电量一般不足以支撑捕鱼灯本体1在水中持续静止吸引鱼群,并使得声波发送模块9持续发送探测声波进行探测,此时需要控制器6直接控制电机2加速转动,以使螺旋桨3带动捕鱼灯本体1脱离水面并由工作人员收回;而对于第一电量统计单元13来说,由于第一电量统计单元13所统计的电机2耗电量是捕鱼灯本体1可以在一个检测时间段内完成对鱼群吸引的,因此电源模块11剩余的电量可以让捕鱼灯本体1再进行一次检测时间段的声波探测,但有且仅有一次,检测之后,控制器6必须控制电机2加速转动,以使螺旋桨3带动捕鱼灯本体1脱离水面并由工作人员收回。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,本说明书(包括摘要和附图)中公开的任一特征,除非特别叙述,均可被其他等效或者具有类似目的的替代特征加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
- 应用于悬浮式捕鱼灯的控制系统
- 应用于悬浮式捕鱼灯的控制系统