一种基于自适应的智能通气控制实验方法及装置
文献发布时间:2023-06-19 13:49:36
技术领域
本发明属于流体机械工程技术领域,具体涉及一种基于自适应的智能通气控制实验方法及装置。
背景技术
水下航行体的通气控制是一个亟需解决的工程问题,涉及固-液-气三相耦合作用。为了使得水下航行体能够适应复杂的海况,通气空泡作为一种能够有效改善航行体水动力学特性的重要方法获得了广泛应用,通气空泡是一种高度复杂的流动现象,涉及多相流、湍流、质量输运、可压缩性和非定常性等复杂的流动机制。尤其是通气空泡技术的应用有效增大了水下航行体的发射深度和海况等级,极大程度提升了水下航行体发射的隐蔽性和发射稳定性,具有重大战略意义。航行体在水下运动时,弹体肩部及中部大部分区域被通气空泡包裹,航行体仅在尾部与头部区域与水接触,由于水密度远远高于空气密度,使得航行体受到的水动力集中在确定的区域,极大地增加了航行体水下运动的稳定性。但在实际发射过程中,由于诸如压力、来流速度等环境条件的不断变化,通气空泡的形态会受到较大扰动,引起航行体水动力环境发生剧烈变化,影响航行体运动的稳定性,甚至引起航行体失效。因此,通过实验研究,充分认识不同发射条件以及海况环境对航行体水动力环境的影响,动态解析航行体发射过程中水动力学环境的变化与空泡形态的实时相应,揭示相关的水动力学特性和结构响应问题的机理,建立提升空泡与航行体水动力稳定性的实时控制方法,实现航行体对更大深度、更剧烈海况的适应性,对提升航行体隐蔽性和打击目标准确度,具有重要的意义。
目前,针对航行体/结构体发射出水过程的研究大多集中在确定条件下的航行体通气空化水动力行为,无法有效针对航行体发射出水过程中的不同环境条件控制航行体的空泡形态特征,实现航行体自身对其水动力环境的自适应智能控制。
发明内容
本发明的目的是弥补现有实验技术的不足,在现有空化水洞的基础上,本发明的目的是提供一种基于自适应的智能通气控制实验方法及装置,通过实时控制空泡长度,实现多种结构体基于不同来流速度、不同来流稳定性的空泡形态特征的自适应调节,进而实现实验中航行体自身对其水动力环境的自适应智能控制。
本发明的目的是通过下述技术方案实现的:
本发明公开的一种基于自适应的智能通气控制实验方法,包括以下步骤:
步骤一、利用控制器进行通气控制时,根据接收到的力矩信息按以下三种情况之一处理,并进入步骤二。
情况一,在实验中,改变来流条件,并由力矩传感器实时采集的电压信号,经过V/A转换器后,输入至控制器中;若控制器接收的电流信息较初始值或目标值有增加,且增加值大于初始值或目标值阈值百分比,则增大通气量,并继续获取下一时刻的电流信息,直至电流信息平稳,且信号值与初始值或目标值相差不大于阈值百分比,然后进入步骤二;
情况二,在实验中,改变来流条件,并由力矩传感器实时采集的电压信号,经过V/A转换器后,输入至控制器中,若控制器接收的电流信息较初始值或目标值有减小,且减小值大于初始值或目标值的阈值百分比,则减小通气量,并继续获取下一时刻的电流信息,直至电流信息平稳,且信号与初始值或目标值相差不大于阈值百分比,然后进入步骤二;
情况三,在实验中,改变来流条件,并由力矩传感器实时采集的电压信号,经过V/A转换器后,输入至控制器中,若控制器接收的电流信息较平稳,且信号与初始值或目标值相差不大于阈值百分比,则直接进入步骤二;
步骤二、经过步骤一后,继续改变来流条件,重复步骤一,并记录步骤一的电流电压信号,直至完成全部所需的实验工况。
步骤三、经过步骤二后,将记录结果处理后得到控制律信息,将控制律输入至控制器中,实现该初始条件或目标值下的智能控制,即通过实时控制空泡形态特征,实现实验中航行体自身对其水动力环境的自适应智能控制。
步骤三所述记录结果处理的方式为:基于通气量与空泡长度的回归分析。通气量与控制器输出的电流信号值存在直接对应关系,将通气量替换为控制器输出的电流信号值;空泡长度与力矩信号存在直接对应关系,将空泡长度替换为力矩传感器输出的电压信号,得出表征控制器输出的电流信号值(即气动阀开度信息)与力矩信号值关系的控制律,如公式(1)所示:
Q=αf(u,f,A,u
其中Q为通气量,u为来流速度,f为阵风水翼摆动频率,A为阵风水翼摆动振幅,u*为初始来流速度,L为目标长度,α为经验参数,f()为对应的关系式。公式(1)经过转化后得到形如公式(2)的式子:
A
其中A
所述记录结果包括通气空泡流场结构信息、被测模型力矩信息、控制律输出的电流信息、气动阀开度信息、流量计测得的气体流量信息、试验水洞内流体的速度和环境压力信息。
所述控制律为力矩传感器输出的力矩信息、控制器输出的气动阀开度信息、试验初始来流条件、试验初始通气条件、来流条件改变值以及目标值之间的对应关系。所得控制律在后续的介绍中不再提及具体获得方法,主要介绍其使用过程。
所述力矩信号与空泡长度存在直接的相关关系,即空泡长度增加力矩信号减弱;空泡长度减小力矩信号增强。所述通气量与气动阀开度存在直接的相关关系,即气动阀开度增大,通气量增加;气动阀开度减小,通气量减小。
作为优选,情况一中,所述增加值大于初始值或目标值阈值百分比选5%;信号值与初始值或目标值相差不大于阈值百分比,所述阈值百分比选5%。
情况二中,所述减小值大于初始值或目标值阈值百分比选5%;信号值与初始值或目标值相差不大于阈值百分比,所述阈值百分比选5%。
情况三中,信号值与初始值或目标值相差不大于阈值百分比,所述阈值百分比选5%。
步骤一所述调节通气量的方式包括两种方式:方式一:基于控制器自身的特性,控制器每次以一固定值调节通气量,直至满足步骤一中所述条件要求;方式二:基于对通气空化的要求,手动调节通气量,直至满足步骤一中所述条件要求。
所述条件要求指对应步骤一中进入步骤二的三种情况对应的条件。
若需要对不同初始条件或不同目标进行智能控制,本发明公开的一种基于自适应的智能通气控制实验方法,还包括步骤四:根据实验需求,选用方法一或方法二实现对不同初始条件或不同目标进行智能控制,即通过实时控制空泡长度,实现多种结构体基于不同来流速度、不同来流稳定性的空泡形态特征的自适应调节,并进入步骤五。
方法一:修改初始条件或目标值重复步骤一、步骤二、步骤三;
方法二:根据先验信息训练用于智能通气控制实验的神经网络,基于训练优化神经网络实现相应控制律。
步骤五:验证并记录所得控制律,应用控制律实现基于自适应的智能通气控制实验。
本发明还公开一种基于自适应的智能通气控制实验装置,用于实现所述一种基于自适应的智能通气控制实验方法,包括通气流量的实时智能调控系统、空泡特征参数多场实时同步测量系统、海浪模拟系统。
通气流量的实时智能调控系统作用在于:根据获取的力矩信号及其变化,通过控制器实时控制气动阀开度变化,实现通气量的实时调整。
空泡特征参数多场实时同步测量系统作用在于:获取同一时间段内的物理场和流场的实验信息。
海浪模拟系统作用在于:在原有闭式循环水洞提供的定常来流基础上,提供纵向速度,产生波浪状来流,实现对实际海况的模拟。
所述通气流量的实时智能调控系统,包括压缩机、压力调节阀、缓冲罐、转子流量计、流量调节阀、气动阀、控制器、电脑、力矩传感器、V/A转换器、输气管和数据线。
压缩机、压力调节阀、缓冲罐、转子流量计与气动阀之间通过输气管道连接,通过压力阀实现通气系统内部的压力控制,气动阀根据输入的电流情况实时改变阀门开度实现流量控制,同时流量调节阀也对流量进行控制,实际流量由气动阀与流量调节阀耦合控制,转子流量计实时测量通气系统内的流气体流量信息,并实现流量信息的可视化;力矩传感器分别连接至电脑和V/A转换器,力矩传感器将测量获得的力矩信号转化为V级电压信号,通过电脑实时显示力矩信息,完成数据初步处理和采集,V/A转换器将力矩传感器的电压信号实时转换为电流信号。电脑与V/A传感器分别通过数据线与控制器连接,电脑能够将分析数据获得的控制律实时导入控制器中,V/A将获得的电流信号输出至控制器。控制器与气动阀之间通过导线连接,控制器能够根据控制律与实时输入的电流信号生成新的所需电流信号供给气动阀,实现实时控制气动阀的开闭,即通过控制器实时控制气动阀开度变化,实现通气量的实时调整。
所述空泡特征参数多场实时同步测量系统,包括镝灯、高速相机、力矩传感器、电脑、数据线。镝灯连接到其开关,并由对应的镝灯支架固定。高速相机与电脑通过数据线连接,实现流场信息实时显示,并通过电脑触发高速相机。力矩传感器通过连杆直接与被测模型连接,实时感知模型惯性力矩、附加质量力矩和水动载载荷力矩等三者的总力矩,并输出对应的电压信号,通过其内部放大器将mV级信号转换为V级电信号。力矩传感器与电脑和V/A转换器之间通过数据传输线相连接,实现将观测到的数据实时显示在电脑对应的处理软件上,同时将电压信号转换为控制器需要的电流信号。空泡特征参数多场实时同步测量系统通过电脑同时触发高速相机与力矩传感器实现同步记录流场结构以及力矩信息,进而获取同一时间段内的物理场和流场的实验信息。
所述海浪模拟系统,包括振荡水翼、飞轮转子、连杆。振荡水翼与飞轮转子之间通过连杆连接。飞轮转子通过转动实现振荡水翼同步周期性摆动,产生周期性来流模拟实际的海况环境。通过改变转子与连杆的连接位置以及飞轮转子转速,实现振荡水翼振荡振幅和频率的调整,实现多海况的模拟。
有益效果:
1、本发明公开的一种基于自适应的智能通气控制实验方法及装置,利用控制律实时控制空泡长度,实现多种结构体基于不同来流速度、不同来流稳定性的空泡形态特征的自适应调节,进而实现实验中航行体自身对其水动力环境的自适应智能控制。
2、本发明公开的一种基于自适应的智能通气控制实验方法及装置,根据多次试验获取的先验信息训练用于智能通气控制实验的神经网络,基于训练优化神经网络实现相应控制律,利用控制律直接实现基于自适应的智能通气控制,并能够通过机器学习的方法拓展其控制律,广泛适应各种发射条件;
3、本发明公开的一种基于自适应的智能通气控制实验方法及装置,通过调整压力调节阀调节通气系统内的压力实现不同压力的通气输入;通过调整飞轮转子的转速与半径实现水翼振动频率与振幅的改变,实现多海况模拟;通过智能采集力矩信息,同步根据控制律智能调整通气流量,实现实验中智能变通气量;在此基础上实现多种结构体基于不同来流速度、不同来流稳定性的空泡形态特征的自适应调节,进而实现实验中航行体自身对其水动力环境的自适应智能控制。
4、本发明公开的一种基于自适应的智能通气控制实验方法及装置,通过同步触发高速相机与力矩传感器实现多物理场同步信息测量。
附图说明
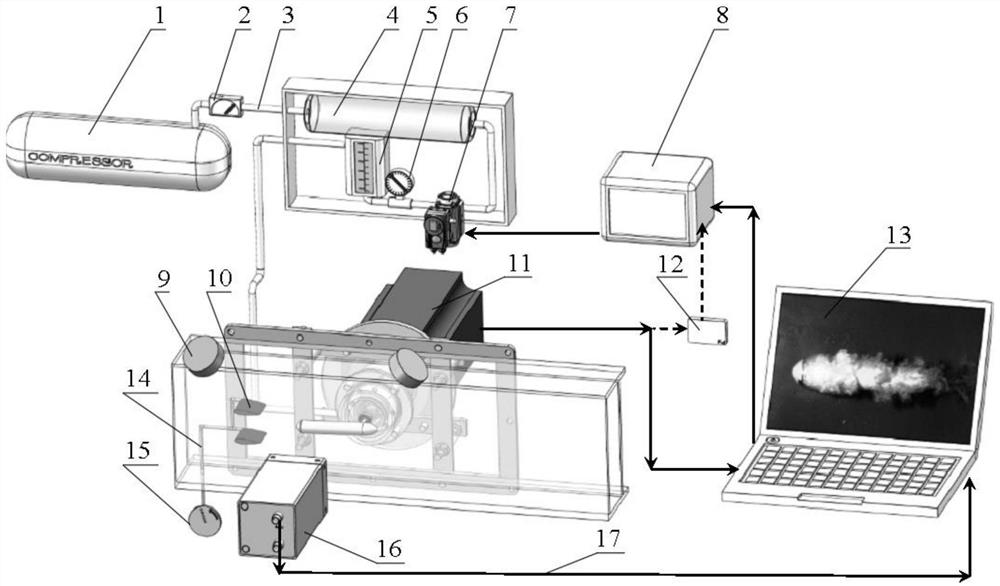
图1是本发明一种基于自适应的智能通气控制实验装置布局立体示意图;
图2是同步测量系统操作流程图;
图3是一种基于自适应的智能通气控制实验流程;
图4是试验结果及其回归分析图;
其中,1-空气压缩机,2-压力调节阀,3-输气管,4-缓冲罐,5-转子流量计,6-流量调节阀,7-气动阀,8-控制器,9-镝灯,10-振荡水翼,11-力矩传感器,12-V/A转换器,13-电脑,14-连杆,15-飞轮转子,16-高速相机,17-数据线。
具体实施方式
为了更好的说明本发明的目的和优点,下面结合附图和实例对发明内容做进一步说明。
实施例1:
本实施例通过将控制律植入控制器中,实现变来流条件下通气空泡长度的稳定控制,进而实现实验中空泡形态特征的自适应调节。
如图1所示,本实施例公开的一种基于自适应的智能通气控制实验装置,通气流量的实时智能调控系统、空泡特征参数多场实时同步测量系统、海浪模拟系统。
所述通气流量的实时智能调控系统,包括空气压缩机1、压力调节阀2、输气管3、缓冲罐4、转子流量计5、流量调节阀6、气动阀7、控制器8、力矩传感器11、V/A转换器12、电脑13、数据线17。空气压缩机1与压力调节阀2之间通过输气管3连接,压力调节阀2与缓冲罐4之间通过输气管3连接,缓冲罐4与气动阀7之间通过输气管3连接,气动阀7与流量调节阀6之间通过输气管3连接,流量调节阀6与转子流量计5之间通过输气管3连接。力矩传感器11与被测模型通过固定的方式直接连接,力矩传感器11与电脑13之间通过数据线17连接,力矩传感器11与V/A传感器12之间通过数据线17连接,V/A转换器与控制器8之间通过数据线17连接,电脑13与控制器8之间通过数据线17连接,控制器8与气动阀7之间通过数据线17连接。该系统是实验装置的核心系统,用于实现基于自适应的智能通气控制;
所述空泡特征参数多场实时同步测量系统,包括镝灯9、力矩传感器11、电脑13、高速相机16、数据线17。镝灯不与其他部件连接,连接电源后独立固定在所需位置;力矩传感器11与电脑13之间通过数据线17连接,高速相机16与电脑13之间通过数据线17连接。在该系统中,多场的同步触发是关键问题,通过对力矩信号进行阶跃电压信号模拟可实现对高速相机的同步触发,该系统用于多场信号的同步测量;
所述海浪模拟系统,包括振荡水翼10、连杆14、飞轮转子15。一组平行的振荡水翼10通过连杆固定在被测模型前端,两个振荡水翼10通过连杆14连接,并与飞轮转子15之间通过连杆14连接,其中飞轮转子15设置有不同位置的多个固定孔,用于将连杆固定于不同位置。该系统用于模拟不同海况下的来流特征;
被测模型直接与与力矩传感器11和通气管3直接连接;力矩传感器11获取并输出被测结构体受到的力矩信息,将信息通过数据线17传输至电脑13,通过数据分析得到所需的控制律信息,将控制律传输至控制器8,同时,力矩传感器11将获取的力矩信息以电压信号的形式传输至V/A转换器12,V/A转换器12实时输出对应的电流信号至控制器8,控制器8根据所得控制律以及电流信号,生成调节气动阀7所需的电流信号,气动阀7根据输入的电流信号实时改变开度,实现对通气流量的实时控制。在该过程中,压缩机1、压力调节阀2、流量调节阀6需提前启动并进行设置。启动压缩机1实现气源输入,调节压力调节阀2实现该系统内部气体压力控制,调节流量调节阀6确定初始条件的通气流量。当被测模型受到的力矩发生剧烈变化时,力矩传感器11捕捉到力矩变化,并生成对应的阶跃电压信号,电压信号传输至电脑13,经由电脑13处理后传输至高速相机16,高速相机16触发,对流场信息进行拍摄,同时电脑8记录力矩传感器11生成的电压信号,对力矩场进行记录,同时信号传输至控制器8,控制器8对气动阀7的开度进行调整,气动阀7将其开度信息传输会控制器,并储存,实现对多场信息的同步测量,如图2所示。当需要对海况模拟时,启动飞轮转子15,飞轮转子15通过旋转带动连杆14运动,进而引起振荡水翼10周期性摆动,实现海浪模拟。
如图2、3所示,本发明实施例公开的一种基于自适应的智能通气控制实验方法,具体实现步骤如下:
步骤一、利用控制器8进行通气控制时,根据接收到的力矩信息按以下三种情况之一处理,并进入步骤二。
情况一,在实验中,改变来流条件,并由力矩传感器11实时采集的电压信号,经过V/A转换器12后,输入至控制器8中;若控制器8接收的电流信息较初始值或目标值有增加,且增加值大于初始值或目标值的5%,则增大通气量,并继续获取下一时刻的电流信息,直至电流信息平稳,且信号值与初始值或目标值相差不大于5%,然后进入步骤二;
情况二,在实验中,改变来流条件,并由力矩传感器11实时采集的电压信号,经过V/A转换器12后,输入至控制器8中,若控制器8接收的电流信息较初始值或目标值有减小,且减小值大于初始值或目标值的5%,则减小通气量,并继续获取下一时刻的电流信息,直至电流信息平稳,且信号与初始值或目标值相差不大于5%,然后进入步骤二;
情况三,在实验中,改变来流条件,并由力矩传感器11实时采集的电压信号,经过V/A转换器12后,输入至控制器8中,若控制器接收的电流信息较平稳,且信号与初始值或目标值相差不大于5%,则直接进入步骤二;
步骤二、经过步骤一后,继续改变来流条件,重复步骤一,并记录步骤一的电流电压信号,直至完成全部所需的实验工况。
步骤三、经过步骤二后,将记录结果处理后得到控制律信息,将控制律输入至控制器8中,实现该初始条件或目标值下的智能控制,即通过实时控制空泡形态特征,实现实验中航行体自身对其水动力环境的自适应智能控制。
步骤三所述记录结果处理的方式为:基于通气量与空泡长度的回归分析。通气量与控制器输出的电流信号值存在直接对应关系,将通气量替换为控制器8输出的电流信号值;空泡长度与力矩信号存在直接对应关系,将空泡长度替换为力矩传感器11输出的电压信号,得出表征控制器8输出的电流信号值(即气动阀开度信息)与力矩信号值关系的控制律,如公式(3)所示:
Q=αf(u,f,A,u
其中Q为通气量,u为来流速度,f为阵风水翼摆动频率,A为阵风水翼摆动振幅,u*为初始来流速度,L为目标长度,α为经验参数,f()为对应的关系式。公式(1)经过转化后得到形如公式(4)的式子:
A
其中A
所述记录结果包括通气空泡流场结构信息、被测模型力矩信息、控制律输出的电流信息、气动阀开度信息、流量计测得的气体流量信息、试验水洞内流体的速度和环境压力信息。
所述控制律为力矩传感器11输出的力矩信息、控制器8输出的气动阀开度信息、试验初始来流条件、试验初始通气条件、来流条件改变值以及目标值之间的对应关系。所得控制律在后续的介绍中不再提及具体获得方法,主要介绍其使用过程。
所述力矩信号与空泡长度存在直接的相关关系,即空泡长度增加力矩信号减弱;空泡长度减小力矩信号增强。所述通气量与气动阀开度存在直接的相关关系,即气动阀开度增大,通气量增加;气动阀开度减小,通气量减小。
步骤一所述调节通气量的方式包括两种方式:方式一:基于控制器8自身的特性,控制器8每次以一固定值调节通气量,直至满足步骤一中所述条件要求;方式二:基于对通气空化的要求,手动调节通气量,直至满足步骤一中所述条件要求。
所述条件要求指对应步骤一中进入步骤二的三种情况对应的条件。
若需要对不同初始条件或不同目标进行智能控制,本实施例公开的一种基于自适应的智能通气控制实验方法,还包括步骤四:根据实验需求,选用方法一或方法二实现对不同初始条件或不同目标进行智能控制,即通过实时控制空泡长度,实现多种结构体基于不同来流速度、不同来流稳定性的空泡形态特征的自适应调节,并进入步骤五。
方法一:修改初始条件或目标值重复步骤一、步骤二、步骤三;
方法二:根据先验信息训练用于智能通气控制实验的神经网络,基于训练优化神经网络实现相应控制律。
步骤五:验证并记录所得控制律,应用控制律实现基于自适应的智能通气控制实验。
本实施例公开的一种基于自适应的智能通气控制实验方法的具体操作步骤为:
将选定的用于通气试验的被测模型安装在空化水洞特定位置,分别准备通气流量的实时智能调控系统、空泡特征参数多场实时同步测量系统、海浪模拟系统;启动闭式循环水洞,调节水洞初始流速为4m/s,调节水洞初始环境压力为表压0Pa,调节通气量为350L/h,保持振荡水翼水平,将此时的空泡长度作为目标值,60mm。并启动通气流量的实时智能调控系统,增大来流速度至4.25m/s,此时有两种方案:
方案一,待控制器自行调整通气量,直至空泡长度(力矩信号)恢复至目标长度(或目标长度对应的力矩信号),激发多场同步测量系统,记录实验数据。
方案一,手动增大通气量5L/h,观察力矩传感器11输出的力矩信号,如信号与目标信号相差仍大于5%则,继续调整通气量,直至空泡长度(力矩信号)恢复至目标长度(或目标长度对应的力矩信号),激发多场同步测量系统,记录实验数据。
改变来流速度至4.57m/s、5.12m/s、5.43m/s和6.31m/s,重复以上过程,多次进行试验,获得在4m/s来流初始条件,以及60mm空泡长度目标值下的控制律关系,结果记录如图4所示,图中虚线为通气量与来流速度的二次多项式拟合线,对应的函数关系式为:y=70.516x
其中y为实验中的通气量,x为实验中的来流速度。
在本次实验中,将该关系式转化为力矩信号与气动阀6开度之间的关系,并输入至控制器8中。将来流速度设置为4m/s,启动通气流量的实时智能调控系统,比较力矩信号与目标力矩信号,若信号值相差大于5%,则重新梳理通量与来流速度关系式;若差距小于5%,则将来流速度增大至4.25m/s、4.57m/s、5.12m/s、5.43m/s和6.31m/s,依次对力矩信号进行对比。最终,在初始条件为来流速度4m/s实现实验中空泡长度的稳定控制。
以上所述的具体描述,对发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。