一种载人潜器自动释放对接装置及操作方法
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及海洋装备释放对接技术领域,尤其是一种载人潜器自动释放对接装置及操作方法。
背景技术
载人潜器主要常用于深海资源勘查和科学研究等作业。在开始执行任务之前,由水面母船携带航行至作业目标海域,利用水面母船上的吊放装置将载人潜器布放至近水面处,蛙人通过快速艇航行至载人潜器上方,将起吊装置与载人潜器分离,然后载人潜器靠自身动力潜入水下完成预定作业任务;完成作业任务后,载人潜器浮出水面,由蛙人将水面母船的起吊装置挂在载人潜器的起吊点,再通过起吊装置将载人潜器回收至水面母船甲板上。整个释放与对接过程中,均需要蛙人来完成任务,这种方式主要存在三个问题:一是海况恶劣时,会造成蛙人释放与对接时间长,导致载人潜器内的潜航员在水面颠簸,严格时会导致潜航员产生晕厥等症状,造成无法继续操控载人潜器进行作业;二是蛙人单次作业费用较高,且自动化程度不高;三是海况恶劣时,蛙人在载人潜器上方容易站立不稳,而且海浪容易将蛙人拍打到水面以下,并且起吊装置在风浪的作用下也会产生晃动,巨大的重量如果撞击到蛙人会发生严重的人身事故。
发明内容
本申请人针对上述现有生产技术中的缺点,提供一种载人潜器自动释放对接装置及操作方法,从而可以完全实现自动化释放与对接,减少人工操作带来的各种问题,大大提高了工作可靠性和安全性。
本发明所采用的技术方案如下:
一种载人潜器自动释放对接装置,包括安装在载人潜器顶部位置的固定基座,所述固定基座的内侧设置有内凹结构,还包括与固定基座对应的移动基座,所述移动基座的内侧设置有与固定基座相同的内凹结构,两个内凹结构互相对应,固定基座与移动基座贴合时,两个内凹结构构成球形空间,此球形空间内配合放置起吊钢球,所述起吊钢球的顶部连接起吊钢丝绳;
所述移动基座的外端面固定有辅助机构,
辅助机构的结构为:包括固定板,所述固定板安装在载人潜器的框架上,一号连杆一端通过铰接连接在固定板上,另一端与二号连杆和伸缩油缸的活塞杆通过铰接连接在一起,三号连杆一端通过铰接连接在固定板上,另一端与四号连杆和伸缩油缸的底座通过铰接连接在一起;二号连杆和四号连杆同时连接在过渡板上,过渡板的外端与移动基座之间安装有弹簧;
还包括升降油缸,所述升降油缸的输出端顶部固定有磁铁,所述磁铁与所述起吊钢球的底部对应。
其进一步技术方案在于:
所述起吊钢球的底部为平面。
所述起吊钢球的底部设置有圆台型中空结构。
所述磁铁的截面呈圆台型结构。
所述固定基座和移动基座均采用不锈钢材质。
所述移动基座位于最左端时,移动基座和固定基座的距离大于起吊钢球的直径。
所述移动基座位于最左端时,升降油缸的位置位于移动基座和固定基座的中心位置。
所述固定板与过渡板之间安装有四根导向杆。
所述过渡板和移动基座之间安装有两根加长杆。
一种载人潜器自动释放对接装置的操作方法,包括如下步骤:
第一步:通过水面母船的起吊装置将载人潜器起吊到近水面状态,此时起吊钢球位于固定基座和移动基座之间,升降油缸顶部的磁铁位于下方;
第二步:载人潜器内的潜航员通过给伸缩油缸发送伸出指令,在导向杆的作用下过渡板向左呈直线移动,从而带动移动基座远离固定基座;
第三步:当移动基座和固定基座的距离大于起吊钢球的直径时,通过给起吊钢球施加拉力,起吊钢球在拉力的作用下实现释放,达到载人潜器释放的效果,载人潜器可自由航行,释放之后控制伸缩油缸缩回,将移动基座恢复至初始状态;
第四步:回收载人潜器之前,载人潜器航行至近水面,水面母船的操作人员将起吊钢球释放至载人潜器上方起吊装置附近,载人潜器内的潜航员收到指令,通过控制伸缩油缸伸出,带动移动基座远离固定基座,当移动基座和固定基座的距离大于起吊钢球的直径时,控制升降油缸伸出,带动磁铁上升至外面,在磁铁的磁力下可将起吊钢球吸住,并进入到起吊钢球内部的圆台型中空结构;
第五步:载人潜器内的潜航员控制升降油缸缩回,将起吊钢球带入到移动基座和固定基座之间的间隙,当起吊钢球底部与移动基座和固定基座的底部齐平时,升降油缸停止动作;
第六步:载人潜器内的潜航员通过控制伸缩油缸缩回,带动移动基座靠近固定基座,当移动基座和固定基座之间的距离小于起吊钢球的直径时,通过控制升降油缸再下移一段距离,此时磁铁从起吊钢球内部的中空结构解脱;
第七步:载人潜器内的潜航员通过继续控制伸缩油缸缩回,带动移动基座靠近固定基座,直至移动基座和固定基座贴紧,此时将起吊钢球夹紧,完成载人潜器的对接,然后通过起吊钢球将载人潜器起吊至水面母船。
本发明的有益效果如下:
本发明结构紧凑、合理,操作方便,通过辅助机构、固定基座、起吊钢球、移动基座和升降油缸的互相配合工作,可以方便的完成载人潜器在进行作业任务时自动释放与对接,自动化程度高,结构简单,工作可靠,减少了人工释放与对接操作带来的一系列问题,安全系数高。
附图说明
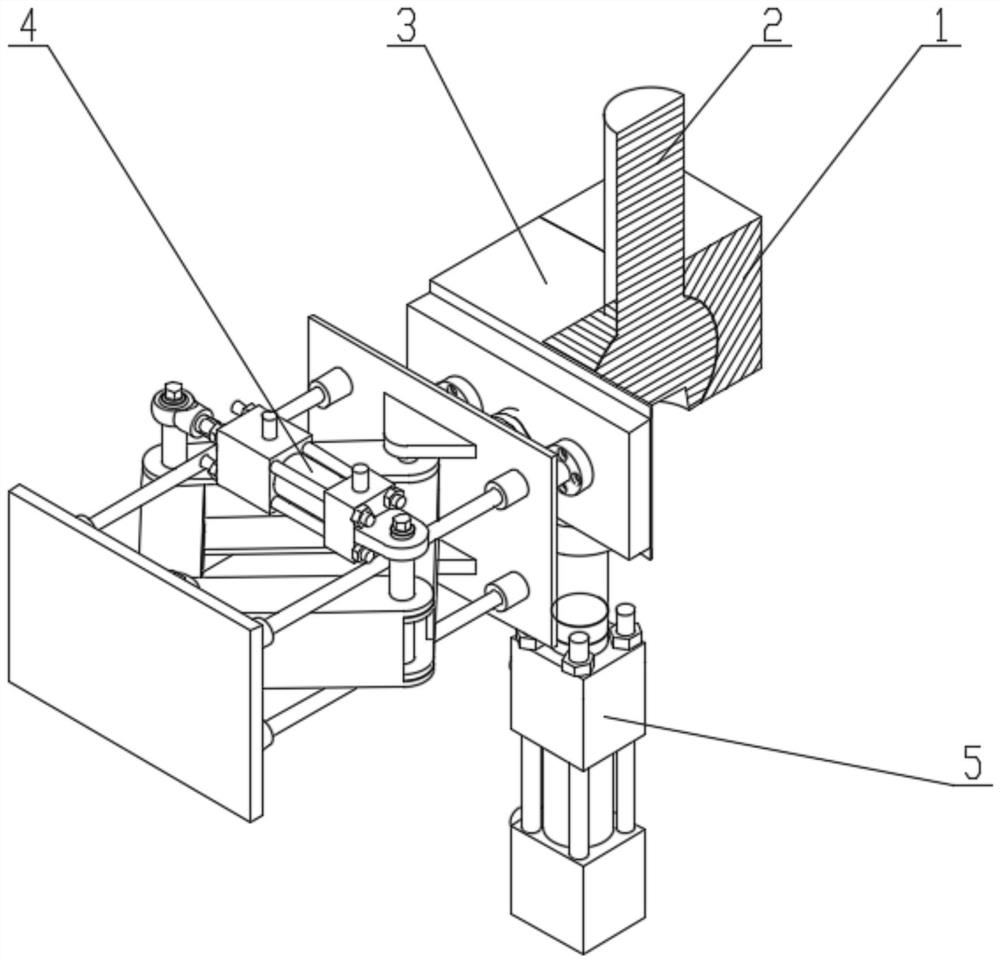
图1为本发明的整体结构示意图。
图2为本发明的俯视图。
图3为本发明解脱之前的状态示意图。
图4为本发明解脱之后的状态示意图。
图5为本发明对接之前的状态示意图。
图6为本发明对接过程的状态示意图。
图7为本发明对接之后的状态示意图。
其中:1、固定基座;2、起吊钢球;3、移动基座;4、辅助机构;5、升降油缸;6、磁铁;
401、固定板;402、一号连杆;403、导向杆;404、伸缩油缸;405、二号连杆;406、过渡板;407、加长杆;408、弹簧;409、三号连杆;410、四号连杆。
具体实施方式
下面结合附图,说明本发明的具体实施方式。
如图1-图7所示,本实施例的载人潜器自动释放对接装置,包括安装在载人潜器顶部位置的固定基座1,固定基座1的内侧设置有内凹结构,还包括与固定基座1对应的移动基座3,移动基座3的内侧设置有与固定基座1相同的内凹结构,两个内凹结构互相对应,固定基座1与移动基座3贴合时,两个内凹结构构成球形空间,此球形空间内配合放置起吊钢球2,起吊钢球2的顶部连接起吊钢丝绳;
移动基座3的外端面固定有辅助机构4,
辅助机构4的结构为:包括固定板401,固定板401安装在载人潜器的框架上,一号连杆402一端通过铰接连接在固定板401上,另一端与二号连杆405和伸缩油缸404的活塞杆通过铰接连接在一起,三号连杆409一端通过铰接连接在固定板401上,另一端与四号连杆410和伸缩油缸404的底座通过铰接连接在一起;二号连杆405和四号连杆410同时连接在过渡板406上,过渡板406的外端与移动基座3之间安装有弹簧408;
还包括升降油缸5,升降油缸5的输出端顶部固定有磁铁6,磁铁6与起吊钢球2的底部对应。
起吊钢球2的底部为平面。
起吊钢球2的底部设置有圆台型中空结构。
磁铁6的截面呈圆台型结构。
固定基座1和移动基座3均采用不锈钢材质。
移动基座3位于最左端时,移动基座3和固定基座1的距离大于起吊钢球2的直径。
移动基座3位于最左端时,升降油缸5的位置位于移动基座3和固定基座1的中心位置。
固定板401与过渡板406之间安装有四根导向杆403。
过渡板406和移动基座3之间安装有两根加长杆407。
本实施例的载人潜器自动释放对接装置的操作方法,包括如下步骤:
第一步:通过水面母船的起吊装置将载人潜器起吊到近水面状态,此时起吊钢球2位于固定基座1和移动基座3之间,升降油缸5顶部的磁铁6位于下方;
第二步:载人潜器内的潜航员通过给伸缩油缸404发送伸出指令,在导向杆403的作用下过渡板406向左呈直线移动,从而带动移动基座3远离固定基座1;
第三步:当移动基座3和固定基座1的距离大于起吊钢球2的直径时,通过给起吊钢球2施加拉力,起吊钢球2在拉力的作用下实现释放,达到载人潜器释放的效果,载人潜器可自由航行,释放之后控制伸缩油缸404缩回,将移动基座3恢复至初始状态;
第四步:回收载人潜器之前,载人潜器航行至近水面,水面母船的操作人员将起吊钢球2释放至载人潜器上方起吊装置附近,载人潜器内的潜航员收到指令,通过控制伸缩油缸404伸出,带动移动基座3远离固定基座1,当移动基座3和固定基座1的距离大于起吊钢球2的直径时,控制升降油缸5伸出,带动磁铁6上升至外面,在磁铁6的磁力下可将起吊钢球2吸住,并进入到起吊钢球2内部的圆台型中空结构;
第五步:载人潜器内的潜航员控制升降油缸5缩回,将起吊钢球2带入到移动基座3和固定基座1之间的间隙,当起吊钢球2底部与移动基座3和固定基座1的底部齐平时,升降油缸5停止动作;
第六步:载人潜器内的潜航员通过控制伸缩油缸404缩回,带动移动基座3靠近固定基座1,当移动基座3和固定基座1之间的距离小于起吊钢球2的直径时,通过控制升降油缸5再下移一段距离,此时磁铁6从起吊钢球2内部的中空结构解脱;
第七步:载人潜器内的潜航员通过继续控制伸缩油缸404缩回,带动移动基座3靠近固定基座1,直至移动基座3和固定基座1贴紧,此时将起吊钢球2夹紧,完成载人潜器的对接,然后通过起吊钢球2将载人潜器起吊至水面母船。
本发明的具体结构和功能如下:
主要包括固定基座1、起吊钢球2、移动基座3、辅助机构4、升降油缸5、磁铁6、固定板401、一号连杆402、导向杆403、伸缩油缸404、二号连杆405、过渡板406、加长杆407和弹簧408、三号连杆409和四号连杆410等。
如图1所示,固定基座1固定在载人潜器顶部位置,固定基座1内侧为内凹结构,起吊钢球2底部为平面,且底部为圆台型中空结构,起吊钢球2一端由起吊钢丝绳连接,移动基座3的内侧同样设置有内凹结构,固定基座1和移动基座3贴合时,其内部的内凹结构与起吊钢球2完全一致,固定基座1和移动基座3均为不锈钢材质。
辅助机构4主要包括固定板401、一号连杆402、导向杆403、伸缩油缸404、二号连杆405、过渡板406、加长杆407、弹簧408、三号连杆409和四号连杆410等。
其中固定板401固定在载人潜器框架上,一号连杆402一端通过铰接连接在固定板401上,另一端与二号连杆405和伸缩油缸404的活塞杆通过铰接连接在一起,三号连杆409一端通过铰接连接在固定板401上,另一端与四号连杆410和伸缩油缸404的底座通过铰接连接在一起。
其中导向杆403有四根,一端固定在固定板401上,另一端穿过过渡板406的圆孔。加长杆407有两根,一端与过渡板406固定,另一端与移动基座3固定。弹簧408一端与过渡板406固定,另一端与移动基座3固定,弹簧408的长度大于加长杆407,可始终保持压缩状态。
其中升降油缸5的尾部固定在载人潜器框架上,升降油缸5活塞杆顶部与磁铁6通过螺纹固定在一起。其中磁铁6为圆台结构,其外形与起吊钢球2底部的中空结构一致。
如图4所示,移动基座3位于最左端时,移动基座3和固定基座1的距离大于起吊钢球2的直径。
其中,移动基座3位于最左端时,升降油缸5的位置位于移动基座3和固定基座1的中心位置,且始终不变。
实际使用过程中:
起吊钢球2通过钢丝绳与母船上的起吊装置连接,起吊钢球2的外形与固定基座1和移动基座3的内部中空结构一致,可保证固定基座1和移动基座3在贴合时能够将起吊钢球2夹紧。辅助机构4通过伸缩油缸404的伸缩可以带动移动基座3左右移动,从而实现起吊钢球2的夹紧和松开。固定基座1和移动基座3贴合时,弹簧408始终处于压缩状态,可防止伸缩油缸404出现泄漏时,移动基座3松动。
释放载人潜器时,载人潜器内的潜航员通过控制伸缩油缸404伸出,过渡板406可带动移动基座3远离固定基座1,当移动的距离大于起吊钢球2的外径时,在外力的作用下可将起吊钢球2释放,从而达到载人潜器与起吊钢球2的释放;回收载人潜器时,载人潜器内的潜航员通过控制升降油缸5的活塞杆上升带动磁铁6上升,通过磁铁6将起吊钢球2吸住,磁铁6外形为圆台结构,其外形与起吊钢球2底部的中空结构一致,这样可保证磁铁6吸住起吊钢球2时,圆台起导向作用,将磁铁6送入起吊钢球2内部的中空结构,然后通过控制升降油缸5缩回,可将起吊钢球2带入到移动基座3和固定基座1之间的空隙。再控制伸缩油缸404缩回,过渡板406可带动移动基座3靠近固定基座1,将起吊钢球2送入固定基座1和移动基座3内部的中空结构,实现起吊钢球2的夹紧,从而达到载人潜器与起吊钢球2的对接。
本发明具体的操作方法,包括以下操作步骤:
第一步:通过水面母船的起吊装置将载人潜器起吊到近水面状态,自动释放对接装置的状态如图3所示;
第二步:载人潜器内的潜航员通过给伸缩油缸404发送伸出指令,在导向杆403的作用下过渡板406向左呈直线移动,从而带动移动基座3远离固定基座1;
第三步:当移动基座3和固定基座1的距离大于起吊钢球2的直径时,通过给起吊钢球2施加拉力,起吊钢球2在拉力的作用下实现释放,如图4所示,达到载人潜器释放的效果,载人潜器可自由航行,释放之后控制伸缩油缸404缩回,将移动基座3恢复至初始状态;
第四步:回收载人潜器之前,载人潜器航行至近水面,水面母船的操作人员将起吊钢球2释放至载人潜器上方起吊装置附近,载人潜器内的潜航员收到指令,通过控制伸缩油缸404伸出,带动移动基座3远离固定基座1,当移动基座3和固定基座1的距离大于起吊钢球2的直径时,控制升降油缸5伸出,带动磁铁6上升至外面,在磁铁6的磁力下可将起吊钢球2吸住,并进入到起吊钢球2内部的中空结构,如图5所示;
第五步:载人潜器内的潜航员控制升降油缸5缩回,将起吊钢球2带入到移动基座3和固定基座1之间的间隙,当起吊钢球2底部与移动基座3和固定基座1的底部齐平时,升降油缸5停止动作,如图6所示;
第六步:载人潜器内的潜航员通过控制伸缩油缸404缩回,带动移动基座3靠近固定基座1,当移动基座3和固定基座1之间的距离小于起吊钢球2的直径时,通过控制升降油缸5再下移一段距离,此时磁铁6从起吊钢球2内部的中空结构解脱,如图7所示。
第七步:载人潜器内的潜航员通过继续控制伸缩油缸404缩回,带动移动基座3靠近固定基座1,直至移动基座3和固定基座1贴紧,此时将起吊钢球2夹紧,完成载人潜器的对接,如图3所示,然后通过起吊钢球2将载人潜器起吊至水面母船。
以上描述是对本发明的解释,不是对发明的限定,本发明所限定的范围参见权利要求,在本发明的保护范围之内,可以作任何形式的修改。