一种隔热防水涂料制备方法
文献发布时间:2023-06-19 13:51:08
技术领域
本发明涉及涂料制备技术领域,尤其涉及一种隔热防水涂料制备方法。
背景技术
防水涂料是指用于防止水侵入和渗漏的涂料,防水涂料经固化后形成的防水薄膜具有一定的延伸性、弹塑性、抗裂性、抗渗性及耐候性,能起到防水、防渗和保护作用,防水涂料有良好的温度适应性,操作简便,易于维修与维护,防水涂料在制备时,需要将防水涂料原材料分别加入到搅拌设备内将其搅拌均匀后进行涂抹作业。现有技术在防水涂料搅拌成型后,防水涂料出料的过程和对搅拌装置的清理过程是分开进行的,无法在防水涂料出料时对搅拌设备进行清理,导致出料速度慢和清理效率低,且在对搅拌设备进行清理时,对清理过程把握不足,导致清理不彻底的问题。
发明内容
为此,本发明提供一种隔热防水涂料制备方法,用以克服现有技术中在对搅拌设备进行清理时,对清理过程把握不足,导致清理不彻底的问题。
为实现上述目的,本发明一种提供隔热防水涂料制备方法,包括:
步骤S1,按照预设配比准备防水乳液、去离子水、分散剂、消泡剂、增稠剂和粉料;
步骤S2,将所述步骤S1中所述防水乳液和所述去离子水通过进料口输送至搅拌桶内,控制单元启动搅拌设备对搅拌桶内的原料进行搅拌,以制备第一混合料;其中,所述搅拌设备包括用以对物料进行搅拌的搅拌单元、用以辅助出料和对搅拌单元进行清理的清理单元、用以输出防水涂料的出料口和控制单元,所述出料口设置有用以检测防水涂料的出料速度的流速传感器,所述搅拌单元包括搅拌桶;
步骤S3,将所述消泡剂加入至所述步骤S2制备的第一混合料中,所述搅拌设备继续搅拌,以制备第二混合料;
步骤S4,将所述粉料和所述增稠剂加入至至所述步骤S3制备的第二混合料中,所述搅拌设备继续搅拌,以制备防水涂料;
步骤S5,将所述步骤S4中制备的防水涂料通过出料口进行出料,并在出料时,所述控制单元启动清理单元进行辅助出料和对所述搅拌桶进行清理,其中,所述清理单元液压缸、用以清理搅拌桶的清理组件以及用以辅助清理的辅助组件,所述清理组件包括与所述液压杆相连连接架、与连接架相连的推杆、与推杆相连的推板以及设置在推杆中的检测部,所述检测部包括弹簧、限位柱和用以检测限位柱与所述推杆之间距离的距离传感器;
在所述步骤S5中,所述控制单元获取所述流速传感器获取的实际出料速度,所述控制单元实际出料速度预设值进行比对,所述控制单元若判定实际出料速度大于等于预设值,所述控制单元不启动所述清理单元,所述控制单元若判定实际出料速度小于预设值,所述控制单元驱动所述清理单元进行辅助出料,并所述控制单元在进行辅助出料时,所述控制单元获取所述距离传感器测得的所述限位柱与所述推杆之间的实际距离,并将实际距离与预设值进行比对,所述控制单元若判定实际距离大于等于预设值,所述控制单元判定无需对所述搅拌桶进行二次清理,所述控制单元若判定实际距离小于预设值,所述控制单元将控制液压缸降低推板的移动速度至对应值、同时增加超声波强度至对应值,以使所述限位柱与所述推杆之间的实际距离符合标准。
进一步地,在所述步骤S5中,在防水涂料通过出料口进行出料时,所述控制单元获取所述流速传感器实时测得的防水涂料的实际出料速度V,所述控制单元将实际出料速度与预设防水涂料出料速度V0进行比对,并根据比对结果判定是否进行辅助出料;
当V≥V0时,所述控制单元判定防水涂料出料速度符合标准,并无需启动所述清理单元进行辅助出料;
当V<V0时,所述控制单元判定防水涂料出料速度不符合标准,并需启动所述清理单元进行辅助出料,所述控制单元将清理单元的移动速度设置为Qa,设定Qa=V0-V。
进一步地,当所述控制单元将清理单元的移动速度设置为Qa时,所述控制单元获取所述距离传感器实时测得的所述推杆与所述限位柱之间实际距离S,并将实际距离S与预设距离S0进行比对,并根据比对结果判定是否需对所述搅拌桶进行二次清理;
所述预设距离S0包括第一预设距离S1和第二预设距离S2,其中,S1<S2;
当S≥S2时,所述控制单元判定无需对所述搅拌桶进行二次清理,并继续制备防水涂料;
当S<S2时,所述控制单元判定需对所述搅拌桶进行二次清理。
进一步地,当所述控制单元判定需对所述搅拌桶进行二次清理时,所述控制单元将实际距离S与第一预设距离S1进行比对,并根据比对结果调节所述清理单元的工作模式;
当S1≤S<S2时,所述控制单元判定无需调节所述清理单元的工作模式,并控制液压缸降低所述清理单元的移动速度至对应值;
当S<S1时,所述控制单元将所述清理单元的工作模式调节为:返回式,并控制液压缸降低所述清理单元的移动速度至对应值。
进一步地,当所述控制单元判定需降低所述清理单元的移动速度时,所述控制单元将降低后所述清理单元的移动速度记为Qb,设定Qb=Q0ⅹ[1-S/(S1+S2)ⅹ0.4)],其中,Q0为预设二次清理时清理单元的移动速度。
进一步地,所述辅助组件包括用以提供动力的第二电机、用以传递动力的丝杠和用以辅助清理的超声波装置,所述控制单元中还设置有所述推杆与所述限位柱之间距离最小值Smin,当所述控制单元判定实际距离S小于第一预设距离S1时,所述控制单元将实际距离S与距离最小值Smin进行比对,当S>Smin时,所述控制单元判定无需使用辅助单元进行辅助清理,当S≤Smin时,所述控制单元判定需使用辅助单元进行辅助清理,并将所述辅助单元的移动速度设置为Qb。
进一步地,当所述控制单元判定需使用辅助单元进行辅助清理时,所述控制单元计算距离差值△S,并根据距离差值△S修正所述辅助单元超声波强度,所述控制单元将修正后的超声波强度记为W,设定W=W0ⅹ(1+△S/S),△S=Smin-S;其中,W0为预设辅助单元超声波强度。
进一步地,所述搅拌单元还包括用以提供动力的第一电机、用以对搅拌桶内物料进行加热的加热器以及用以对物料进行搅拌的搅拌轴,所述控制单元中还设置有二次清理次数最大值Ymax,当所述控制单元控制清理单元完成对所述搅拌桶的二次清理时,所述控制单元将实际二次清理次数记为Y=1,当所述控制单元控制清理单元完成对所述搅拌桶的n次二次清理时,所述控制单元将实际二次清理次数记为Y=n,所述控制单元将实际二次清理次数Y与二次清理次数最大值Ymax进行比对,当Y>Ymax时,所述控制单元判定二次清理次数不符合标准,并需调节下次制备防水涂料时的工作参数,当Y≤Ymax时,所述控制单元判定二次清理次数符合保准,并无需调节下次制备防水涂料时的工作参数。
进一步地,当所述控制单元判定需调节下次制备防水涂料时的工作参数时,所述控制单元将增加下次制备防水涂料时的搅拌温度,所述控制单元将增加后下次制备防水涂料时的搅拌温度记为Ra,设定Ra=R0ⅹ(1+(Y-Ymax)/Ymax),其中,R0为当次制备防水涂料时的搅拌温度。
进一步地,所述控制单元中还设置有搅拌温度最大值Rmax,当所述控制单元判定需将搅拌温度调节至Ra时,所述控制单元将Ra与搅拌温度最大值Rmax进行比对,当Ra>Rmax时,所述控制单元判定下次制备防水涂料时的搅拌温度不符合标准,并调节下次制备防水涂料时的搅拌速度,所述控制单元将下次制备防水涂料时的搅拌速度记为D,设定D=D0ⅹ(1+(Ra-Ymax)/Ra);当Ra≤Ramax时,所述控制单元判定搅拌温度符合标准,并无需调节下次制备防水涂料时的搅拌速度。
与现有技术相比,本发明的有益效果在于,本发明控制单元通过获取流速传感器获取的实际出料速度,并将实际出料速度预设值进行比对,通过控制单元实时获取出料速度和实时比对,其一方面,通过控制单元实时获取实际出料速度,可以精准的对防水涂料出料速度进行把控,并实际出料速度小于预设值时,控制单元通过启动清理单元进行辅助出料,以保证出料速度,其另一方面,通过控制单元启动清理单元进行辅助出料,并在辅助出料时,可以对搅拌桶内壁上附着的涂料进行初步清除,在保证出料速度的同时,可以有效的减少防水涂料在搅拌桶内壁上的附着情况,进而提高了对搅拌桶内壁的清理效率。
尤其,控制单元可以在进行辅助出料时,通过获取所述距离传感器实时测得的所述限位柱与所述推杆之间的实际距离,并将实际距离与预设值进行比对,其一方面,通过控制单元将实际距离进行实时比对,可以有效的掌握搅拌桶内壁的涂料附着情况,并在实际距离小于预设值时,通过控制单元控制清理单元对搅拌桶内壁上附着的防水涂料进行二次清理,进行可以有效的对搅拌桶内壁上附着的防水涂料进行清理,提高了清理效率,其另一方面,在进行二次清理时,通过控制单元控制辅助单元对对搅拌桶内壁上附着的防水涂料进行清理,更进一步的提高了清理效率,进而可以对搅拌桶的清理更加彻底。
进一步地,本发明控制单元中预设防水出料速度,在防水涂料制备完成且进行出料时,控制单元通过获取流速传感器获取的实际出料速度,并将实际出料速度预设值进行比对,通过控制单元实时获取出料速度和实时比对,其一方面,通过控制单元实时获取实际出料速度,可以精准的对防水涂料出料速度进行把控,并实际出料速度小于预设值时,控制单元通过启动清理单元进行辅助出料,以保证出料速度,其另一方面,通过控制单元启动清理单元进行辅助出料,并在辅助出料时,可以对搅拌桶内壁上附着的涂料进行初步清除,在保证出料速度的同时,可以有效的减少防水涂料在搅拌桶内壁上的附着情况,进而提高了对搅拌桶内壁的清理效率,从而有效的降低了对搅拌桶的清理难度。
进一步地,本发明控制单元中通过将所述推杆与所述限位柱之间的预设距离设置为两个,在进行辅助出料时,通过控制单元实时获取所述距离传感器实时测得的所述推杆与所述限位柱之间实际距离,并实际值与第二预设值进行比对,可以精准的掌握搅拌桶内壁涂料附着情况,当实际距离大于等于第二预设距离时,表示搅拌桶内壁上附着的涂料的量较小,并无需对搅拌桶内壁进行清理,当实际距离小于第二预设值时,表示搅拌桶内壁上附着的涂料的量较大,需对搅拌桶内壁进行二次清理,以降低防水涂料的浪费,并通过二次清理,可以提高清理效率,进而可以对搅拌桶的清理更加彻底
进一步地,本发明控制单元判定需对搅拌桶进行二次清理时,通过将实际距离与第一预设距离进行比对,可以更加精准的掌握搅拌桶内壁上的涂料附着情况,当实际距离在预设值范围内时,控制单元判定搅拌桶内壁上的涂料附着量较大,且清理难度不高,控制单元判定只需控制液压缸降低清理单元的移动速度即可满足清理需求,当实际距离小于第一预设距离时,所述控制单元判定搅拌桶内壁上的涂料附着量较大,且清理难度较大,并需调节清理单元的工作模式满足二次清理需求,进而通过控制单元实时调节清理单元的工作模式,可以提高清理效率,进而可以对搅拌桶的清理更加彻底。
进一步地,本发明控制单元中还设置有所述推杆与所述限位柱之间距离最小值,当实际距离小于等于所述推杆与所述限位柱之间距离最小值时,控制单元判定搅拌桶内壁上防水涂料附着量大,且清理难度高,并通过启动辅助单元进行辅助清理,通过辅助单元发出超声波,可以对搅拌桶附着的涂料进行有效的清理,可以提高清理效率,进而可以对搅拌桶的清理更加彻底。
进一步地,本发明控制单元通过距离差值修正实际辅助单元超声波强度,当距离差值越大时,表示搅拌桶内壁上防水涂料附着量越大,且清理难度越高,通过增加超声波强度可以更好对附着涂料进行清理,可以提高清理效率,进而可以对搅拌桶的清理更加彻底。
进一步地,本发明控制单元中还设置有二次清理次数最大值,在控制单元控制清理单元对搅拌桶进行二次清理时,通过实时把控清理次数,可以精准的掌握清理时的难易程度,当实际二次清理次数小于等于二次清理次数最大值时,所述控制单元判定防水涂料的附着量符合标准,且在制备时的工作参数符合标准,当实际二次清理次数大于二次清理次数最大值时,所述控制单元判定防水涂料的附着量不符合标准,且在制备时的工作参数不符合标准,以至于防水涂料附着量过大,并通过控制单元修正下次制备防水涂料时的工作参数,可以有效的降低防水涂料在搅拌桶内壁上的附着,从而有效的降低了清理难度,进而可以提高清理效率,可以对搅拌桶的清理更加彻底。
进一步地,本发明控制单元通过增加下次制备防水涂料时的温度,可以降低防水涂料的粘性,进而,可以有效的减少防水涂料在搅拌桶内壁上的附着,从而有效的降低了清理难度,进而进而可以提高清理效率,可以对搅拌桶的清理更加彻底。
进一步地,本发明控制单元中还设置有搅拌温度最大值,通过控制单元实时把控下次制备防水涂料时的搅拌温度,调节后下次制备防水涂料时的温度不符合标准时,通过增加下次制备防水涂料时的搅拌速速,从而可以有效的降低防水涂料的粘性,进而,可以有效的减少防水涂料在搅拌桶内壁上的附着,从而有效的降低了清理难度,进而进而可以提高清理效率,可以对搅拌桶的清理更加彻底。
附图说明
图1为本发明所述隔热防水涂料制备方法的流程示意图;
图2为本发明所述隔热防水涂料制备方法的搅拌设备示意图;
图3为本发明所述隔热防水涂料制备方法的搅拌设备剖面示意图;
图4为本发明所述隔热防水涂料制备方法的搅拌设备检测部放大图。
附图标记:1-壳体,2-液压缸,3-第一电机,4-搅拌轴,5-搅拌桶,6-出料口,7-第二电机,8-超声波装置,9-丝杠,10-支撑架,11-进料口,12-推板,21-连接架,22-推杆,221-弹簧,222-限位柱。
具体实施方式
为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
需要说明的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
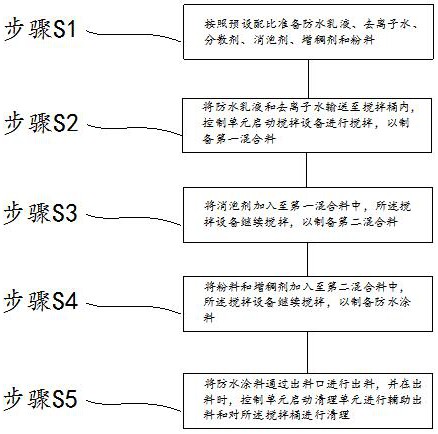
请参阅图1所示,为本发明实施例提供的所述隔热防水涂料制备方法的流程示意图,包括:
步骤S1,按照预设配比准备防水乳液、去离子水、分散剂、消泡剂、增稠剂和粉料;
步骤S2,将所述步骤S1中所述防水乳液和所述去离子水通过进料口输送至搅拌桶内,控制单元启动搅拌设备对搅拌桶内的原料进行搅拌,以制备第一混合料;
步骤S3,将所述消泡剂加入至所述步骤S2制备的第一混合料中,所述搅拌设备继续搅拌,以制备第二混合料;
步骤S4,将所述粉料和所述增稠剂加入至至所述步骤S3制备的第二混合料中,所述搅拌设备继续搅拌,以制备防水涂料;
步骤S5,将所述步骤S4中制备的防水涂料通过出料口进行出料,并在出料时,所述控制单元启动清理单元进行辅助出料和对所述搅拌桶进行清理。
请继续参阅图2所示,为本发明实施例提供的所述隔热防水涂料制备方法的搅拌设备示意图,包括:
壳体1,用以承载部件;
搅拌单元,其与所述壳体连接,用以搅拌物料;
清理单元,其与所述壳体连接,用以辅助出料和对所述搅拌单元进行清理;
进料口11,其与所述搅拌单元连接,用以输送物料;
出料口6,其与所述搅拌单元连接,用以输出防水涂料;所述出料口设置有流速传感器(图中未画出),用以检测防水涂料的出料速度,所述流速传感器将测得的结果发送至控制单元;
支撑架10,其设置在所述壳体的底部,用以支撑壳体;
控制单元(图中未画出),其与所述清理单元和所述搅拌单元连接,用以控制设备运行。
请继续参阅图3所示,为本发明实施例提供的所述隔热防水涂料制备方法的搅拌设备剖面示意图。所述搅拌单元包括用以提供动力的第一电机3、用以容纳物料的搅拌桶5、用以对搅拌桶内物料进行加热的加热器(图中未画出)以及用以对物料进行搅拌的搅拌轴4,其中,所述搅拌桶设置在所述壳体内部,所述搅拌桶顶部设置有第一电机,所述搅拌桶底部设置有出料口,所述第一电机与设置在所述搅拌桶内部的搅拌轴相连。在进行搅拌时,所述控制单元通过控制第一电机带动搅拌轴旋转,以对搅拌桶内的物料进行搅拌以制备防水涂料。
请继续参阅图3所示,所述清理单元包括液压缸2、用以清理搅拌桶的清理组件以及用以辅助清理的辅助组件,其中,液压缸2设置在壳体的顶部,用以驱动清理组件进行辅助出料和对搅拌桶进行清理。
请继续参阅图3所示,所述清理组件包括连接架21、推杆22、推板12以及检测部,所述连接架的一端与所述液压缸的输出轴连接,所述连接架的另一端与所述推杆连接,用以传送所述液压缸输出的动力,所述推杆用以输出所述液压缸输出的动力,进行辅助出料和对搅拌桶进行清理,所述推杆中还设置有检测部,所述检测部用以检测涂料清理难易程度,所述推板12与所述推杆22相连,用以辅助出料和对附着在搅拌桶内壁上的涂料进行刮除。在进行辅助出料和对搅拌桶进行清理时,液压缸通过连接架驱动推杆和推板对附着在所述搅拌桶内壁上的涂料进行清理。
请继续参阅图3所示,所述辅助组件包括第二电机7、丝杠9和超声波装置8,其中,第二电机与所述搅拌桶的外壁相连,用以驱动超声波装置进行移动,丝杠贯穿超声波装置与第二电机相连,用以输出第二电机的动力以驱动超声波装置进行移动,超声波装置与所述丝杠相连,用以发出超声波以对附着在搅拌内部上的涂料进行辅助清除。在辅助组件进行工作时,控制单元通过控制第二电机以改变超声波装置的位置,以使超声波装置对附着在搅拌内部上的涂料进行辅助清除。
请参阅图4所示,本发明实施例提供的所述隔热防水涂料制备方法的搅拌设备检测部放大图,所述检测部包括弹簧221、限位柱222、距离传感器(图中未画出),其中,所述弹簧的一端与所述推杆相连,另一端与所述推板相连,所述限位柱的一端推板相连,另一端为自由端,所述距离传感器设置在所述限位柱的自由端上,用以检测所述限位柱与所述推杆之间的距离,并将检测结果发送至控制单元。
具体而言,在所述步骤S5中,所述控制单元获取所述流速传感器获取的实际出料速度,所述控制单元实际出料速度预设值进行比对,所述控制单元若判定实际出料速度大于等于预设值,所述控制单元不启动所述清理单元,所述控制单元若判定实际出料速度小于预设值,所述控制单元驱动所述清理单元进行辅助出料,并所述控制单元在进行辅助出料时,所述控制单元获取所述距离传感器测得的所述限位柱与所述推杆之间的实际距离,并将实际距离与预设值进行比对,所述控制单元若判定实际距离大于等于预设值,所述控制单元判定无需对所述搅拌桶进行二次清理,所述控制单元若判定实际距离小于预设值,所述控制单元将降低推板的移动速度至对应值、同时增加超声波强度至对应值,以使所述限位柱与所述推杆之间的实际距离符合标准。
具体而言,本发明实施例控制单元通过获取流速传感器获取的实际出料速度,并将实际出料速度预设值进行比对,通过控制单元实时获取出料速度和实时比对,其一方面,通过控制单元实时获取实际出料速度,可以精准的对防水涂料出料速度进行把控,并实际出料速度小于预设值时,控制单元通过启动清理单元进行辅助出料,以保证出料速度,其另一方面,通过控制单元启动清理单元进行辅助出料,并在辅助出料时,可以对搅拌桶内壁上附着的涂料进行初步清除,在保证出料速度的同时,可以有效的减少防水涂料在搅拌桶内壁上的附着情况,进而提高了对搅拌桶内壁的清理效率。
尤其,控制单元可以在进行辅助出料时,通过获取所述距离传感器实时测得的所述限位柱与所述推杆之间的实际距离,并将实际距离与预设值进行比对,其一方面,通过控制单元将实际距离进行实时比对,可以有效的掌握搅拌桶内壁的涂料附着情况,并在实际距离小于预设值时,通过控制单元控制清理单元对搅拌桶内壁上附着的防水涂料进行二次清理,进行可以有效的对搅拌桶内壁上附着的防水涂料进行清理,提高了清理效率,其另一方面,在进行二次清理时,通过控制单元控制辅助单元对对搅拌桶内壁上附着的防水涂料进行清理,更进一步的提高了清理效率,进而可以对搅拌桶的清理更加彻底。
具体而言,在所述步骤S5中,在防水涂料通过出料口进行出料时,所述控制单元获取所述流速传感器实时测得的防水涂料的实际出料速度V,所述控制单元将实际出料速度与预设防水涂料出料速度V0进行比对,并根据比对结果判定是否进行辅助出料;
当V≥V0时,所述控制单元判定防水涂料出料速度符合标准,并无需启动所述清理单元进行辅助出料;
当V<V0时,所述控制单元判定防水涂料出料速度不符合标准,并需启动所述清理单元进行辅助出料,所述控制单元将清理单元的移动速度设置为Qa,设定Qa=V0-V。
具体而言,本发明实施例控制单元中预设防水出料速度,在防水涂料制备完成且进行出料时,控制单元通过获取流速传感器获取的实际出料速度,并将实际出料速度预设值进行比对,通过控制单元实时获取出料速度和实时比对,其一方面,通过控制单元实时获取实际出料速度,可以精准的对防水涂料出料速度进行把控,并实际出料速度小于预设值时,控制单元通过启动清理单元进行辅助出料,以保证出料速度,其另一方面,通过控制单元启动清理单元进行辅助出料,并在辅助出料时,可以对搅拌桶内壁上附着的涂料进行初步清除,在保证出料速度的同时,可以有效的减少防水涂料在搅拌桶内壁上的附着情况,进而提高了对搅拌桶内壁的清理效率,从而有效的降低了对搅拌桶的清理难度。
具体而言,当所述控制单元将清理单元的移动速度设置为Qa时,所述控制单元获取所述距离传感器实时测得的所述推杆与所述限位柱之间实际距离S,并将实际距离S与预设距离S0进行比对,并根据比对结果判定是否需对所述搅拌桶进行二次清理;
所述预设距离S0包括第一预设距离S1和第二预设距离S2,其中,S1<S2;
当S≥S2时,所述控制单元判定无需对所述搅拌桶进行二次清理,并继续制备防水涂料;
当S<S2时,所述控制单元判定需对所述搅拌桶进行二次清理。
具体而言,本发明实施例控制单元中通过将所述推杆与所述限位柱之间的预设距离设置为两个,在进行辅助出料时,通过控制单元实时获取所述距离传感器实时测得的所述推杆与所述限位柱之间实际距离,并实际值与第二预设值进行比对,可以精准的掌握搅拌桶内壁涂料附着情况,当实际距离大于等于第二预设距离时,表示搅拌桶内壁上附着的涂料的量较小,并无需对搅拌桶内壁进行清理,当实际距离小于第二预设值时,表示搅拌桶内壁上附着的涂料的量较大,需对搅拌桶内壁进行二次清理,以降低防水涂料的浪费,并通过二次清理,可以提高清理效率,进而可以对搅拌桶的清理更加彻底。
具体而言,当所述控制单元判定需对所述搅拌桶进行二次清理时,所述控制单元将实际距离S与第一预设距离S1进行比对,并根据比对结果调节所述清理单元的工作模式;
当S1≤S<S2时,所述控制单元判定无需调节所述清理单元的工作模式,并控制液压缸降低所述清理单元的移动速度至对应值;
当S<S1时,所述控制单元将所述清理单元的工作模式调节为:返回式,并控制液压缸降低所述清理单元的移动速度至对应值。
具体而言,本发明实施例控制单元判定需对搅拌桶进行二次清理时,通过将实际距离与第一预设距离进行比对,可以更加精准的掌握搅拌桶内壁上的涂料附着情况,当实际距离在预设值范围内时,控制单元判定搅拌桶内壁上的涂料附着量较大,且清理难度不高,控制单元判定只需控制液压缸降低清理单元的移动速度即可满足清理需求,当实际距离小于第一预设距离时,所述控制单元判定搅拌桶内壁上的涂料附着量较大,且清理难度较大,并需调节清理单元的工作模式满足二次清理需求,进而通过控制单元实时调节清理单元的工作模式,可以提高清理效率,进而可以对搅拌桶的清理更加彻底。
具体而言,本发明实施例中清理单元的默认工作模式为:由液压杆驱动推杆自上而下进行清理搅拌桶内壁上附着的防水涂料,本发明实施例中清理单元的返回式工作模式具体为:由液压杆驱动推杆自上而下移动一段距离后,所述控制单元控制液压缸驱动推杆自下而上移动一段距离,其中,自上而下的移动距离始终大于自下而上的移动距离。
具体而言,当所述控制单元判定需降低所述清理单元的移动速度时,所述控制单元将降低后所述清理单元的移动速度记为Qb,设定Qb=Q0ⅹ[1-S/(S1+S2)ⅹ0.4)],其中,Q0为预设二次清理时清理单元的移动速度。
具体而言,所述控制单元中还设置有所述推杆与所述限位柱之间距离最小值Smin,当所述控制单元判定实际距离S小于第一预设距离S1时,所述控制单元将实际距离S与距离最小值Smin进行比对,当S>Smin时,所述控制单元判定无需使用辅助单元进行辅助清理,当S≤Smin时,所述控制单元判定需使用辅助单元进行辅助清理,并将所述辅助单元的移动速度设置为Qb。
具体而言,本发明实施例控制单元中还设置有所述推杆与所述限位柱之间距离最小值,当实际距离小于等于所述推杆与所述限位柱之间距离最小值时,控制单元判定搅拌桶内壁上防水涂料附着量大,且清理难度高,并通过启动辅助单元进行辅助清理,通过辅助单元发出超声波,可以对搅拌桶附着的涂料进行有效的清理,可以提高清理效率,进而可以对搅拌桶的清理更加彻底。
具体而言,当所述控制单元判定需使用辅助单元进行辅助清理时,所述控制单元计算距离差值△S,并根据距离差值△S修正所述辅助单元超声波强度,所述控制单元将修正后的超声波强度记为W,设定W=W0ⅹ(1+△S/S),△S=Smin-S;其中,W0为预设辅助单元超声波强度。
具体而言,本发明实施例控制单元通过距离差值修正实际辅助单元超声波强度,当距离差值越大时,表示搅拌桶内壁上防水涂料附着量越大,且清理难度越高,通过增加超声波强度可以更好对附着涂料进行清理,可以提高清理效率,进而可以对搅拌桶的清理更加彻底。
具体而言,所述控制单元中还设置有二次清理次数最大值Ymax,当所述控制单元控制清理单元完成对所述搅拌桶的二次清理时,所述控制单元将实际二次清理次数记为Y=1,当所述控制单元控制清理单元完成对所述搅拌桶的n次二次清理时,所述控制单元将实际二次清理次数记为Y=n,所述控制单元将实际二次清理次数Y与二次清理次数最大值Ymax进行比对,当Y>Ymax时,所述控制单元判定二次清理次数不符合标准,并需调节下次制备防水涂料时的工作参数,当Y≤Ymax时,所述控制单元判定二次清理次数符合保准,并无需调节下次制备防水涂料时的工作参数。
具体而言,本发明实施例控制单元中还设置有二次清理次数最大值,在控制单元控制清理单元对搅拌桶进行二次清理时,通过实时把控清理次数,可以精准的掌握清理时的难易程度,当实际二次清理次数小于等于二次清理次数最大值时,所述控制单元判定防水涂料的附着量符合标准,且在制备时的工作参数符合标准,当实际二次清理次数大于二次清理次数最大值时,所述控制单元判定防水涂料的附着量不符合标准,且在制备时的工作参数不符合标准,以至于防水涂料附着量过大,并通过控制单元修正下次制备防水涂料时的工作参数,可以有效的降低防水涂料在搅拌桶内壁上的附着,从而有效的降低了清理难度,进而可以提高清理效率,可以对搅拌桶的清理更加彻底。
具体而言,当所述控制单元判定需调节下次制备防水涂料时的工作参数时,所述控制单元将增加下次制备防水涂料时的搅拌温度,所述控制单元将增加后下次制备防水涂料时的搅拌温度记为Ra,设定Ra=R0ⅹ(1+(Y-Ymax)/Ymax),其中,R0为当次制备防水涂料时的搅拌温度。
具体而言,本发明实施例控制单元通过增加下次制备防水涂料时的温度,可以降低防水涂料的粘性,进而,可以有效的减少防水涂料在搅拌桶内壁上的附着,从而有效的降低了清理难度,进而进而可以提高清理效率,可以对搅拌桶的清理更加彻底。
具体而言,所述控制单元中还设置有搅拌温度最大值Rmax,当所述控制单元判定需将搅拌温度调节至Ra时,所述控制单元将Ra与搅拌温度最大值Rmax进行比对,当Ra>Rmax时,所述控制单元判定下次制备防水涂料时的搅拌温度不符合标准,并调节下次制备防水涂料时的搅拌速度,所述控制单元将下次制备防水涂料时的搅拌速度记为D,设定D=D0ⅹ(1+(Ra-Ymax)/Ra);当Ra≤Ramax时,所述控制单元判定搅拌温度符合标准,并无需调节下次制备防水涂料时的搅拌速度。
具体而言,本发明控制单元中还设置有搅拌温度最大值,通过控制单元实时把控下次制备防水涂料时的搅拌温度,调节后下次制备防水涂料时的温度不符合标准时,通过增加下次制备防水涂料时的搅拌速速,从而可以有效的降低防水涂料的粘性,进而,可以有效的减少防水涂料在搅拌桶内壁上的附着,从而有效的降低了清理难度,进而进而可以提高清理效率,可以对搅拌桶的清理更加彻底。
至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
以上所述仅为本发明的优选实施例,并不用于限制本发明;对于本领域的技术人员来说,本发明可以有各种更改和变化。 凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。