轴承供电控制方法、装置和系统、存储介质
文献发布时间:2023-06-19 19:35:22
技术领域
本公开涉及控制领域,特别涉及一种轴承供电控制方法、装置和系统、存储介质。
背景技术
气悬浮压缩机利用气体作为压缩机轴承转子的支撑介质,通过给气悬浮压缩机持续供电,使得气悬浮压缩机轴承悬浮,从而实现气悬浮压缩机的无油、无摩擦运行。
发明内容
发明人注意到,在相关技术中,当电网失去电力供应,或者电压闪变或跌落时,高速运行的气悬浮压缩机轴承因失去电力供应而直接高速坠落,从而对气悬浮压缩机轴承造成损坏,降低气悬浮压缩机的可靠性。
据此,本公开提供一种轴承供电控制方法,通过利用高速运行的气悬浮电动机的动量,为气悬浮压缩机轴承持续供电,以便气悬浮压缩机轴承安全软着落,从而有效降低了机组故障率,提高气悬浮压缩机的生命周期。
根据本公开实施例的第一方面,提供一种轴承供电控制方法,由轴承供电控制装置执行,包括:根据位于整流电路和逆变电路之间的直流母线上的直流母线电压确定第一直轴电流;根据所述逆变电路和气悬浮电动机之间线路上的三相电流构建的电动机磁场的角速度确定第一交轴电流;利用所述第一直轴电流和所述第一交轴电流对所述逆变电路中的智能功率模块进行磁场定向控制,以便利用所述直流母线电压为气悬浮轴承控制装置供电。
在一些实施例中,根据位于整流电路和逆变电路之间的直流母线上的直流母线电压确定第一直轴电流包括:判断当前的电源电压是否小于第一电压门限;若所述当前的电源电压小于第一电压门限,则进一步判断当前的直流母线电压是否小于第二电压门限;若所述当前的直流母线电压小于第二电压门限,则将位于所述电源和整流电路之间的开关从闭合状态切换为断开状态;在第一时间段内,根据预设电压和所述当前的直流母线电压确定所述第一直轴电流;在第二时间段内,将所述第一直轴电流设置为零;判断所述电动机的转速是否小于转速门限;若所述电动机的转速不小于转速门限,则重复所述判断当前的电源电压是否小于第一电压门限,直到所述电动机的转速小于转速门限为止。
在一些实施例中,根据预设电压和所述当前的直流母线电压确定所述第一直轴电流包括:将所述预设电压和所述当前直流母线电压的差值进行比例积分调节,以得到所述第一直轴电流。
在一些实施例中,所述第一时间段的时间长度小于所述第二时间段的时间长度。
在一些实施例中,根据位于整流电路和逆变电路之间的直流母线上的直流母线电压确定第一直轴电流包括:若所述当前的直流母线电压小于第二电压门限,将位于所述电源和所述整流电路之间的开关从断开状态切换为闭合状态;将所述第一直轴电流设置为零。
在一些实施例中,根据位于整流电路和逆变电路之间的直流母线上的直流母线电压确定第一直轴电流包括:若所述当前的电源电压不小于第一电压门限,则将位于所述电源和所述整流电路之间的开关从断开状态切换为闭合状态;将所述第一直轴电流设置为零。
在一些实施例中,利用所述第一直轴电流和所述第一交轴电流对所述逆变电路中的智能功率模块进行磁场定向控制包括:将所述三相电流中的第一相电流和第二相电流进行克拉克Clark变换,以得到第一变换电流和第二变换电流;将所述第一变换电流和所述第二变换电流进行帕克Park变换,以得到第二直轴电流和第二交轴电流;将所述第一直轴电流和所述第二直轴电流的差值进行比例积分调节,以得到直轴电压;将所述第一交轴电流和所述第二交轴电流的差值进行比例积分调节,以得到交轴电压;将所述直轴电压和所述交轴电压进行逆帕克变换,以得到第一变换电压和第二变换电压;将所述第一变换电压和所述第二变换电压进行空间矢量脉宽调制运算,以得到多个脉宽调制信号;利用所述多个脉宽调制信号对所述智能功率模块进行磁场定向控制。
在一些实施例中,根据所述逆变电路和气悬浮电动机之间线路上的三相电流构建的电动机磁场的角速度确定第一交轴电流包括:利用所述第二直轴电流、所述第二交轴电流、所述直轴电压和所述交轴电压确定所述电动机磁场的角速度;将预设角速度和所述电动机磁场的角速度的差值进行比例积分调节,以得到所述第一交轴电流。
根据本公开实施例的第二方面,提供一种轴承供电控制装置,包括:第一处理模块,被配置为根据位于整流电路和逆变电路之间的直流母线上的直流母线电压确定第一直轴电流;第二处理模块,被配置为根据所述逆变电路和气悬浮电动机之间线路上的三相电流构建的电动机磁场的角速度确定第一交轴电流;第三处理模块,被配置为利用所述第一直轴电流和所述第一交轴电流对所述逆变电路中的智能功率模块进行磁场定向控制,以便利用所述直流母线电压为气悬浮轴承控制装置供电。
在一些实施例中,第一处理模块被配置为判断当前的电源电压是否小于第一电压门限,若所述当前的电源电压小于第一电压门限,则进一步判断当前的直流母线电压是否小于第二电压门限,若所述当前的直流母线电压小于第二电压门限,则将位于所述电源和整流电路之间的开关从闭合状态切换为断开状态,在第一时间段内,根据预设电压和所述当前的直流母线电压确定所述第一直轴电流,在第二时间段内,将所述第一直轴电流设置为零,判断所述电动机的转速是否小于转速门限,若所述电动机的转速不小于转速门限,则重复所述判断当前的电源电压是否小于第一电压门限,直到所述电动机的转速小于转速门限为止。
在一些实施例中,第一处理模块被配置为将所述预设电压和所述当前直流母线电压的差值进行比例积分调节,以得到所述第一直轴电流。
在一些实施例中,所述第一时间段的时间长度小于所述第二时间段的时间长度。
在一些实施例中,第一处理模块被配置为若所述当前的直流母线电压小于第二电压门限,将位于所述电源和所述整流电路之间的开关从断开状态切换为闭合状态,将所述第一直轴电流设置为零。
在一些实施例中,第一处理模块被配置为若所述当前的电源电压不小于第一电压门限,则将位于所述电源和所述整流电路之间的开关从断开状态切换为闭合状态,将所述第一直轴电流设置为零。
在一些实施例中,第三处理模块被配置为将所述三相电流中的第一相电流和第二相电流进行克拉克Clark变换,以得到第一变换电流和第二变换电流,将所述第一变换电流和所述第二变换电流进行帕克Park变换,以得到第二直轴电流和第二交轴电流,将所述第一直轴电流和所述第二直轴电流的差值进行比例积分调节,以得到直轴电压,将所述第一交轴电流和所述第二交轴电流的差值进行比例积分调节,以得到交轴电压,将所述直轴电压和所述交轴电压进行逆帕克变换,以得到第一变换电压和第二变换电压,将所述第一变换电压和所述第二变换电压进行空间矢量脉宽调制运算,以得到多个脉宽调制信号,利用所述多个脉宽调制信号对所述智能功率模块进行磁场定向控制。
在一些实施例中,第二处理模块被配置为利用所述第二直轴电流、所述第二交轴电流、所述直轴电压和所述交轴电压确定所述电动机磁场的角速度,将预设角速度和所述电动机磁场的角速度的差值进行比例积分调节,以得到所述第一交轴电流。
根据本公开实施例的第三方面,提供一种轴承供电控制装置,包括:存储器,被配置为存储指令;处理器,耦合到存储器,处理器被配置为基于存储器存储的指令执行实现如上述任一实施例所述的方法。
根据本公开实施例的第四方面,提供一种轴承供电控制系统,包括:如上述任一实施例所述的轴承供电控制装置;整流电路,其中所述整流电路的输入端通过开关与所述电源连接,所述整流电路的输入端与直流母线电连接;逆变电路,其中所述逆变电路的第一端与所述直流母线电连接,所述逆变电路的第二端与气悬浮电动机电连接;变换电路,其中所述变换电路的输入端与所述直流母线电连接,所述变换电路的输出端与气悬浮轴承控制装置电连接;电压采样电路,用于为采集电源电压,并将采集结果发送给所述控制装置;电流采样电路,用于为采集所述逆变电路和所述气悬浮电动机之间线路上的三相电流中的第一相电流和第二相电流,并将采样结果发送给所述控制装置。
根据本公开实施例的第五方面,提供一种计算机可读存储介质,其中,计算机可读存储介质存储有计算机指令,指令被处理器执行时实现如上述任一实施例所述的方法。
通过以下参照附图对本公开的示例性实施例的详细描述,本公开的其它特征及其优点将会变得清楚。
附图说明
为了更清楚地说明本公开实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1为本公开一个实施例的轴承供电控制系统的结构示意图;
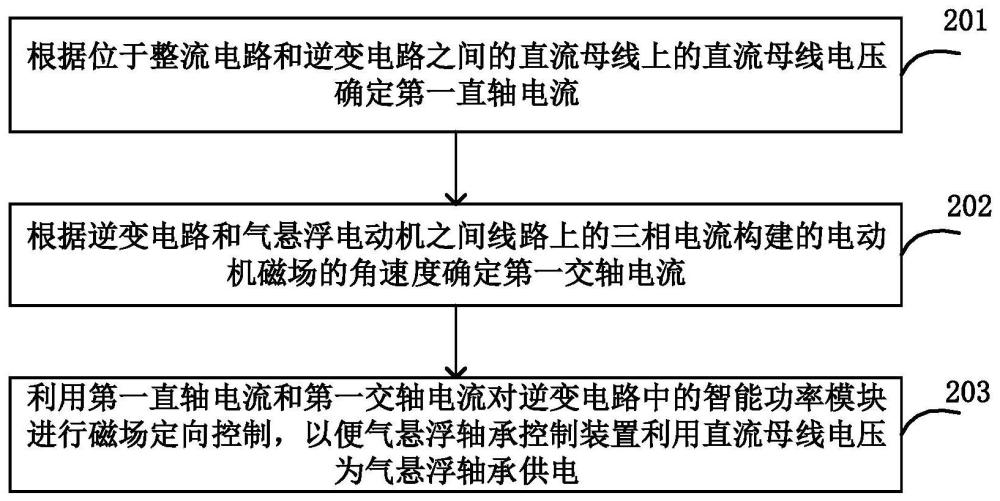
图2为本公开一个实施例的轴承供电控制方法的流程示意图;
图3为本公开另一个实施例的轴承供电控制方法的流程示意图;
图4为本公开又一个实施例的轴承供电控制方法的流程示意图;
图5为本公开一个实施例的轴承供电控制装置的结构示意图;
图6为本公开另一个实施例的轴承供电控制装置的结构示意图;
图7为本公开另一个实施例的轴承供电控制系统的结构示意图。
具体实施方式
下面将结合本公开实施例中的附图,对本公开实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本公开一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本公开及其应用或使用的任何限制。基于本公开中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本公开保护的范围。
除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本公开的范围。
同时,应当明白,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。
对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。
在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
图1为本公开一个实施例的轴承供电控制系统的结构示意图。如图1所示,当开关K闭合时,整流电路将三相交流电进行整流,以便在整流电路和逆变电路之间的直流母线上形成高压直流电V
此外,逆变电路将直流母线上的高压直流电V
当电压采样电路采集到电网电压Vx(x=R\S\T)异常时,将开关K1设置为断开状态,此时由于电动机还在高速转动,因此可将电动机视为发电机。逆变电路利用电动机的动能在直流母线上生成高压直流电V
也就是说,在没有电网供电的情况下,通过利用电动机的惰性转动,持续给气悬浮轴承控制装置供电,以便确保气悬浮轴承安全着落。
图2为本公开一个实施例的轴承供电控制方法的流程示意图。在一些实施例中,下列的轴承供电控制方法由轴承供电控制装置执行。
在步骤201,根据位于整流电路和逆变电路之间的直流母线上的直流母线电压确定第一直轴电流。
在一些实施例中,确定第一直轴电流的步骤如图3所述。
在步骤301,判断当前的电源电压是否小于第一电压门限。
若当前的电源电压小于第一电压门限,则执行步骤302;否则执行步骤306。
需要说明的是,若当前的电源电压小于第一电压门限,则表明当前的电网电压不正常。
在步骤302,判断当前的直流母线电压是否小于第二电压门限。
若当前的直流母线电压小于第二电压门限,则执行步骤303;否则执行步骤306。
需要说明的是,若当前的直流母线电压小于第二电压门限,则表明当前的电网掉电。
在步骤303,将位于电源和整流电路之间的开关(图1中的开关K1)从闭合状态切换为断开状态。
在步骤304,对第一直轴电流进行分时控制。
在一些实施例中,在第一时间段内,根据预设电压V
在一些实施例中,上述的电压-电流闭环控制和转速-电流闭环控制如图4所示。
在一些实施例中,如图4所示,将预设电压V
在一些实施例中,第一时间段的时间长度小于第二时间段的时间长度。
例如,将0-100ms的时间段划分为第一时间段和第二时间段,第一时间段为[0,20ms],第二时间段为(20,100ms]。在第一时间段内,将预设电压V
在步骤305,判断电动机的转速是否小于转速门限。
若电动机的转速不小于转速门限,则返回步骤301,否则结束本流程。
这里需要说明的是,若电动机的转速小于转速门限,则表明气悬浮轴承安全着落,在这种情况下可停止控制。
在步骤306,将位于电源和整流电路之间的开关从断开状态切换为闭合状态。
在步骤307,将第一直轴电流
需要说明的是,在电网电压正常的情况下,或者在电网电压不正常、但电网未掉电的情况下,通过闭合于电源和整流电路之间的开关,并将第一直轴电流设置为零,以便进行转速-电流闭环控制。
返回步骤2。在步骤202,根据逆变电路和气悬浮电动机之间线路上的三相电流构建的电动机磁场的角速度确定第一交轴电流。
在一些实施例中,如图4所示,将预设角速度ω
在步骤203,利用第一直轴电流和第一交轴电流对逆变电路中的智能功率模块进行磁场定向控制,以便气悬浮轴承控制装置利用直流母线电压为气悬浮轴承供电。
在一些实施例中,如图4所示,将逆变电路和气悬浮电动机之间线路上的三相电流中的第一相电流i
需要说明的是,图1中的逆变电路中示出的电路就是IPM。
此外,如图4所示,利用第二直轴电流i
需要说明的是,如图4所示,若开关K位于位置1,则表明第一直轴电流
这里还需要说明的是,在如图4所示的控制方案中,采用转速电流双闭环控制,其中转速环为外环,电流环为内环。
如图4所示,针对电流环,将逆变电路和气悬浮电动机之间线路上的三相电流中的v相电流i
如图4所示,针对转速环,利用EMF对第二直轴电流i
图5为本公开一个实施例的轴承供电控制装置的结构示意图。如图5所示,轴承供电控制装置包括第一处理模块51、第二处理模块52和第三处理模块53。
第一处理模块51被配置为根据位于整流电路和逆变电路之间的直流母线上的直流母线电压确定第一直轴电流。
在一些实施例中,第一处理模块51判断当前的电源电压是否小于第一电压门限,若当前的电源电压小于第一电压门限,则进一步判断当前的直流母线电压是否小于第二电压门限,若当前的直流母线电压小于第二电压门限,则将位于电源和整流电路之间的开关从闭合状态切换为断开状态,在第一时间段内,根据预设电压和当前的直流母线电压确定第一直轴电流,在第二时间段内,将第一直轴电流设置为零,判断电动机的转速是否小于转速门限,若电动机的转速不小于转速门限,则重复判断当前的电源电压是否小于第一电压门限,直到电动机的转速小于转速门限为止。
例如,第一处理模块51将预设电压和当前直流母线电压的差值进行比例积分调节,以得到第一直轴电流。
例如,第一时间段的时间长度小于第二时间段的时间长度。
在一些实施例中,第一处理模块51被配置为若当前的直流母线电压小于第二电压门限,将位于电源和整流电路之间的开关从断开状态切换为闭合状态,将第一直轴电流设置为零。
在一些实施例中,第一处理模块51被配置为若当前的电源电压不小于第一电压门限,则将位于电源和整流电路之间的开关从断开状态切换为闭合状态,将第一直轴电流设置为零。
第二处理模块52被配置为根据逆变电路和气悬浮电动机之间线路上的三相电流构建的电动机磁场的角速度确定第一交轴电流。
在一些实施例中,第二处理模块52利用第二直轴电流、第二交轴电流、直轴电压和交轴电压确定电动机磁场的角速度,将预设角速度和电动机磁场的角速度的差值进行比例积分调节,以得到第一交轴电流。
第三处理模块53被配置为利用第一直轴电流和第一交轴电流对逆变电路中的智能功率模块进行磁场定向控制,以便气悬浮轴承控制装置利用直流母线电压为气悬浮轴承供电。
在一些实施例中,第三处理模块被配置为将三相电流中的第一相电流和第二相电流进行Clark变换,以得到第一变换电流和第二变换电流,将第一变换电流和第二变换电流进行Park变换,以得到第二直轴电流和第二交轴电流,将第一直轴电流和第二直轴电流的差值进行比例积分调节,以得到直轴电压,将第一交轴电流和第二交轴电流的差值进行比例积分调节,以得到交轴电压,将直轴电压和交轴电压进行逆帕克变换,以得到第一变换电压和第二变换电压,将第一变换电压和第二变换电压进行空间矢量脉宽调制运算,以得到多个脉宽调制信号,利用多个脉宽调制信号对智能功率模块进行磁场定向控制。
图6为本公开另一个实施例的轴承供电控制装置的结构示意图。如图6所示,轴承供电控制装置包括存储器61和处理器62。
存储器61用于存储指令,处理器62耦合到存储器61,处理器62被配置为基于存储器存储的指令执行实现如图2至图4中任一实施例涉及的方法。
如图6所示,该轴承供电控制装置还包括通信接口63,用于与其它设备进行信息交互。同时,该轴承供电控制装置还包括总线64,处理器62、通信接口63、以及存储器61通过总线64完成相互间的通信。
存储器61可以包含高速RAM存储器,也可还包括非易失性存储器(non-volatilememory),例如至少一个磁盘存储器。存储器31也可以是存储器阵列。存储器61还可能被分块,并且块可按一定的规则组合成虚拟卷。
此外,处理器62可以是一个中央处理器CPU,或者可以是专用集成电路ASIC,或是被配置成实施本公开实施例的一个或多个集成电路。
本公开同时还涉及一种计算机可读存储介质,其中计算机可读存储介质存储有计算机指令,指令被处理器执行时实现如图2至图4中任一实施例涉及的方法。
图7为本公开另一个实施例的轴承供电控制系统的结构示意图,图7中各电路的具体结构可如图1所示。如图7所示,轴承供电控制系统包括轴承供电控制装置71、整流电路72、逆变电路73、变换电路74、气悬浮轴承控制装置75、电压采样电路76和电流采样电路77。轴承供电控制装置71为图5或图6中任一实施例涉及的轴承供电控制装置。
整流电路72的输入端通过开关710与电源79连接,整流电路72的输入端与直流母线711电连接。逆变电路73的第一端与直流母线711电连接,逆变电路73的第二端与气悬浮电动机78电连接。变换电路74的输入端与直流母线711电连接,变换电路74的输出端与气悬浮轴承控制装置75电连接。气悬浮轴承控制装置75用于为气悬浮轴承712供电。
电压采样电路76用于为采集电源电压,并将采集结果发送给控制装置71。电流采样电路77用于为采集逆变电路73和气悬浮电动机78之间线路上的三相电流中的第一相电流和第二相电流,并将采样结果发送给控制装置71。
在一些实施例中,在上面所描述的功能单元可以实现为用于执行本公开所描述功能的通用处理器、可编程逻辑控制器(Programmable Logic Controller,简称:PLC)、数字信号处理器(Digital Signal Processor,简称:DSP)、专用集成电路(ApplicationSpecific Integrated Circuit,简称:ASIC)、现场可编程门阵列(Field-ProgrammableGate Array,简称:FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件或者其任意适当组合。
本领域普通技术人员可以理解实现上述实施例的全部或部分步骤可以通过硬件来完成,也可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,上述提到的存储介质可以是只读存储器,磁盘或光盘等。
本公开的描述是为了示例和描述起见而给出的,而并不是无遗漏的或者将本公开限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显然的。选择和描述实施例是为了更好说明本公开的原理和实际应用,并且使本领域的普通技术人员能够理解本公开从而设计适于特定用途的带有各种修改的各种实施例。