一种岔路口车辆汇入的后视镜控制系统及方法
文献发布时间:2023-06-23 06:30:03
技术领域
本发明涉及车辆后视镜外翻控制技术领域,特别是涉及一种岔路口车辆汇入的后视镜控制系统及方法。
背景技术
本部分的陈述仅仅是提到了与本发明相关的背景技术,并不必然构成现有技术。
在车辆进入岔路口进行汇入的时候,驾驶员对周边尤其是汇入道路车辆有盲区存在,无法正常监控到来往车辆情况,目前只能依靠驾驶员探出头进行观察路况。
发明内容
为了解决现有技术的不足,本发明提供了一种岔路口车辆汇入的后视镜控制系统及方法;解决现有车辆在岔路口时存在后视镜视野盲区导致行车安全事故的问题,通过本技术方法驾驶员可以获得更好的视野以观察路况车辆状况,减小后视镜盲区面积,减少车辆在岔路口的安全事故发生频率,减少驾驶员需要探出头观察视野的状况,提高安全性,并且提高了车辆自能化程度。
第一方面,本发明提供了一种岔路口车辆汇入的后视镜控制系统;
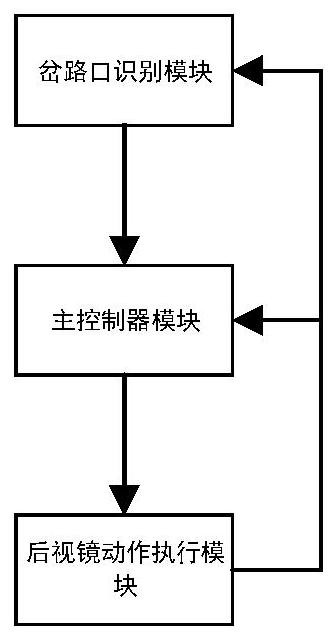
一种岔路口车辆汇入的后视镜控制系统,包括:主控制器;
所述主控制器与岔路口识别模块连接;
所述主控制器还与后视镜动作执行模块连接;
所述岔路口识别模块识别车辆当前行驶的道路,当车辆进入岔路口时,所述岔路口识别模块将车辆进入岔路口的信号发送给主控制器;
所述主控制器接收到车辆进入岔路口的信号后,生成后视镜外翻使能信号,将后视镜外翻使能信号发送给后视镜动作执行模块,后视镜动作执行模块接收到后视镜外翻使能信号后,控制后视镜外翻;
当后视镜外翻时长超过设定时长时,主控制器控制后视镜恢复原位。
第二方面,本发明提供了一种岔路口车辆汇入的后视镜控制系统的控制方法;
一种岔路口车辆汇入的后视镜控制系统的控制方法,包括:
主控制器接收到车辆进入岔路口的信号后,生成后视镜外翻使能信号,将后视镜外翻使能信号发送给后视镜动作执行模块,后视镜动作执行模块接收到后视镜外翻使能信号后,控制后视镜外翻;当后视镜外翻时长超过设定时长时,主控制器控制后视镜恢复原位。
与现有技术相比,本发明的有益效果是:
在车辆进入岔路口时,驾驶员可以手动或主控制器根据传感器或地图识别后自动控制后视镜进行外翻动作,从而使驾驶员在岔路口能够获得更好的视野以观察路况车辆状况,减小后视镜盲区面积,减少车辆在岔路口的安全事故发生频率,减少驾驶员需要探出头观察视野的困扰,提高安全性,并且提高了车辆自能化程度。
附图说明
构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
图1为本发明一种岔路口车辆汇入后视镜控制方法示意图;
图2为本发明一种岔路口车辆汇入后视镜控制方法手动控制实施示意图A;
图3为本发明一种岔路口车辆汇入后视镜控制方法手动控制实施示意图B;
图4为本发明一种岔路口车辆汇入后视镜控制方法自动控制实施示意图;
图5为本发明一种岔路口车辆汇入后视镜控制方法转向灯开关结构示意图;
其中,1、右转向后视镜外翻档,2、右转向灯档,3、转向灯档杆,4、左转向灯档,5、左转向后视镜外翻档。
具体实施方式
应该指出,以下详细说明都是示例性的,旨在对本发明提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本发明所属技术领域的普通技术人员通常理解的相同含义。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本发明的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
本实施例所有数据的获取都在符合法律法规和用户同意的基础上,对数据的合法应用。
实施例一
本实施例提供了一种岔路口车辆汇入的后视镜控制系统;
一种岔路口车辆汇入的后视镜控制系统,包括:主控制器;
所述主控制器与岔路口识别模块连接;
所述主控制器还与后视镜动作执行模块连接;
所述岔路口识别模块识别车辆当前行驶的道路,当车辆进入岔路口时,所述岔路口识别模块将车辆进入岔路口的信号发送给主控制器;
所述主控制器接收到车辆进入岔路口的信号后,生成后视镜外翻使能信号,将后视镜外翻使能信号发送给后视镜动作执行模块,后视镜动作执行模块接收到后视镜外翻使能信号后,控制后视镜外翻;
当后视镜外翻时长超过设定时长时,主控制器控制后视镜恢复原位。
进一步地,所述岔路口识别模块,包括:
手动输入信号,用于驾驶员人为识别出岔路口,驾驶员手动输入车辆进入岔路口指令;或者,
道路传感器,用于识别出岔路口;或者,
车载导航设备,基于车载导航地图识别出岔路口。
示例性地,所述道路传感器采用摄像头来实现,摄像头可以识别岔路口标志或识别实际道路。
进一步地,所述后视镜动作执行模块,采用驱动器和步进电机实现,所述驱动器与主控制器连接,所述驱动器与步进电机连接,主控制器接收到动作执行信号后,将信号发送给驱动器,驱动器将信号发送给步进电机,通过步进电机驱动后视镜转动。
进一步地,驾驶员手动输入车辆进入岔路口指令,包括:
驾驶员通过按键输入车辆进入岔路口指令;或者,
驾驶员通过转向灯开关输入车辆进入岔路口指令。
进一步地,驾驶员通过转向灯开关输入车辆进入岔路口指令,具体包括:
将转向灯开关设置为五个档位;
所述五个档位,由下到上依次包括:左转向后视镜外翻档5、左转向灯档4、中间档、右转向灯档2和右转向后视镜外翻档1;
其中,处于左转向后视镜外翻档的转向灯档杆3能够自动回弹到中间档;
其中,处于右转向后视镜外翻档的转向灯档杆3能够自动回弹到中间档;
其中,中间档,是转向灯档杆的初始位置,当转向灯档杆处于初始位置时,左右转向灯均不亮。
如附图1和图2所示,所述岔路口识别模块识别到进入岔路口状态时,主控制器给出后视镜外翻使能,后视镜动作执行模块执行后视镜外翻动作,并且使能维持设定时长,随后后视镜外翻使能消失,继而后视镜执行外翻恢复动作。
如附图1和图3所示,所述岔路口识别由驾驶员人为识别,当驾驶员判断进入岔路口时,通过手动控制给出后视镜外翻使能与否,当有后视镜外翻使能时,后视镜动作执行模块执行外翻动作;当驾驶员判断驶离岔路口时,此时驾驶员手动控制取消后视镜外翻使能,没有后视镜外翻使能时,后视镜执行外翻恢复动作。
如附图1和图4所示,岔路口识别模块通过传感器识别岔路口工况,或者,通过地图识别岔路口工况,并将岔路口状态信号发给主控制器,主控制器实时判断给出后视镜外翻使能,当有后视镜外翻使能时,后视镜动作执行模块执行外翻动作;当没有后视镜外翻使能时,后视镜动作执行模块执行后视镜外翻恢复动作。
如附图5所示的手动控制提出的转向灯结构,当驾驶员实时判断进入岔路口时,将转向灯开关打到左转向后视镜外翻档和右转向后视镜外翻档位置,控制器根据转向灯开关位置产生后视镜外翻使能,控制器将使能信号发送给后视镜动作执行模块,后视镜动作执行模块外翻动作;而左转向后视镜外翻档和右转向后视镜外翻档回弹,此时没有后视镜外翻使能,后视镜动作执行模块外翻恢复动作。
实施例二
本实施例提供了一种岔路口车辆汇入的后视镜控制系统的控制方法;
一种岔路口车辆汇入的后视镜控制系统的控制方法,包括:
主控制器接收到车辆进入岔路口的信号后,生成后视镜外翻使能信号,将后视镜外翻使能信号发送给后视镜动作执行模块,后视镜动作执行模块接收到后视镜外翻使能信号后,控制后视镜外翻;当后视镜外翻时长超过设定时长时,主控制器控制后视镜恢复原位。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。