一种激光三角位移传感器及其测量方法
文献发布时间:2023-06-19 10:11:51
技术领域
本发明属于几何量测量领域,具体涉及针对空间尺寸狭小环境的激光三角位移传感器及其测量方法。
背景技术
随着我国制造业的稳定发展,机械制造业正在进行新一轮的转型升级,自动化、智能化解决方案正逐步取代传统机械制造方案,成为引领中国制造的核心竞争力。而在众多尺寸测量技术中,针对空间狭小的机械结构内尺寸的自动化测量尚未得以广泛应用,尤其是我国在该技术领域存在较大缺口。
目前对于空间狭小的机械结构内尺寸通常采用气动量仪测量,这种测量方法对狭小空间的密闭性有严格的要求,且要求测量人员具有较高的操作水平,零部件内的尺寸测量效率、精度低,进而导致难以进行大规模的检测任务。因此,针对空间狭小的机械结构内尺寸的自动化、高效测量方法亟待提出。
发明内容
针对上述技术不足,本发明旨在解决狭小测量空间条件下,关键零部件的内尺寸高精度、高效率测量。
本发明解决其技术问题所采用的技术方案是:一种激光三角位移传感器,包括:
激光器,用于发射激光束至反射镜;
反射镜,用于将激光束反射至物体表面;
透镜,用于对经物体表面反射的激光束聚焦,使聚焦之后的激光束在PSD传感器光敏面形成光斑;
PSD传感器,用于进行光电转换,并通过信号处理模块转换成表示物体位置的信息。
所述在激光器的输出光路上设置反射镜,所述反射镜与激光束形成锐角。
所述激光器、透镜、PSD传感器固定在壳体内,所述壳体一侧设有孔、窗口和连杆,所述连杆一端设于孔外围,连杆另一端设置有反射镜,连杆与激光器输出光路平行,使激光器的激光通过孔输出,并依次经反射镜、物体表面反射,通过窗口经透镜聚焦至PSD传感器。
一种激光三角位移传感器测量方法,包括以下步骤:
激光器发射激光束至反射镜,反射镜将激光束反射至物体表面;
经物体表面反射的激光束通过透镜聚焦,使聚焦之后的激光束在位置传感器接收面形成光斑;
PSD传感器进行光电转换,并通过信号处理模块转换成表示物体位置的信息。
所述PSD传感器进行光电转换,并通过信号处理模块转换成表示物体位置的信息,具体如下:
PSD传感器根据光斑获取光斑强度重心,并将光斑强度重心相对于PSD传感器接收面中心的位移通过信号处理模块转换成数字信号进行反馈,用于根据位移与物体位置的对应关系,得到实际物体位置。
所述物体位置为物体表面入射光点与激光束间距离;所述激光束为激光器至反射镜之间的激光束。
所述距离与物体位置的对应关系通过标定得到,包括以下步骤:
建立标定系统:微位移台上固定有被测物面;被测物面一侧依次设有测量镜组、参考镜组和干涉仪;所述测量镜组固定于被测物面上,测量镜组、参考镜组中的分光镜、干涉仪处于一条直线上;被测物面另一侧设有激光器、接收透镜和PSD,激光器发出的激光垂直入射到被测物面,反射的激光经接收透镜聚焦于PSD传感器上形成光斑;
间隔调节微位移台,使光斑遍历PSD传感器光敏面各处,并分别记录PSD传感器的测量值X[n,1]和激光干涉仪的测量值T[n,1],其中n为PSD传感器采样点个数,构成原始数据集;采用曲线拟合的方法将X[n,1]和T[n,1]进行拟合,即可得到PSD传感器的测量数据与干涉仪真实数据之间的对应关系,作为光斑强度重心相对于PSD传感器光敏面中心的位移与物体位置的关系。
本发明具有以下有益效果及优点:
1.本发明中,反射镜的使用实现了斜射式激光三角测量,在实际测量中,只需将反射镜伸入到狭小空间内,并保证设备能够接收到反射光即可完成测量。解决了多数直射式激光三角测量设备在测量空间狭小时面临的问题。
2.本发明主要针对空间尺寸狭小的孔类零件、平行平板或其他复杂机械结构的内尺寸测量。其外形尺寸小,具有良好的通用性、便携性,可实现微小尺寸的高精度、高效率测量。
3.本发明综合了斜射式激光三角法对狭小空间尺寸测量的优势,以及高分辨率、高灵敏度、快速测量的能力。
附图说明
图1a为直射式激光三角测量方法的原理图。
图1b为直射式激光三角测量时物面位移与探测器光斑位置的关系图。
图2为本发明的激光三角测量结构原理图。
图3为本发明中核心部件反射镜的固定方式。
图4为本发明进行测量的初始化流程图。
图5为标定系统原理图。
具体实施方式
下面结合实施例对本发明做进一步的详细说明。
本发明依托于激光三角测量技术,采用半导体激光器作为激光光源,位置敏感器件(PSD)作为光斑位置探测器。根据激光器发射的入射激光与被测物面的法线平行与否,可将激光三角法分为直射式和斜射式两种。通常,对于以镜面反射为主的被测物面,采用斜射式激光三角法,而当被测物面较为粗糙时,直射式和斜射式均可使用。绝大多数现有的高精密尺寸测量解决方案是基于直射式激光三角法,然而,由于直射式三角法原理的限制,在进行狭小空间内的测量任务时,此类测量设备难以深入空间内部,从而无法进行测量。斜射式测量成为这一问题的有效解决方案。
激光三角法的光斑位置探测器通常有多种可选方案,现有的解决方案大多采用CCD或CMOS等分立元素探测器,但此类探测器在测量时需要进行光斑信号的处理,同时测量精度受分立元素尺寸的影响。本发明采用了PSD作为光斑位置探测器,其优势总结为以下两点。第一,PSD的输出信号只与光斑能量重心有关,与光斑形状、强度大小无关,对于仅需获得一维位置信息的应用场景,具有分辨率高、灵敏度高的优势;第二,PSD输出的模拟信号处理过程简单,无需进行光斑能量信号的处理,计算复杂度低,因此测量速度快。
同时,本发明对比直射式激光三角测量具有以下两点有益效果。
第一,激光三角法的测量精度很大程度上取决于对光斑大小的控制,探测器接收的光斑越小,测量精度越高。在直射式激光三角法中,入射激光直接照射到被测物上,随着被测物发生微小移动,光斑大小会发生相应的变化,从而导致探测器接收光斑发生变化。而在本发明中,反射镜不会改变光斑大小。由于激光器与反射镜的相对位置不变,由激光准直后到达反射镜上的激光光斑达到最小,因此被测物的位移不会对光斑大小造成影响,有利于透镜的汇聚和探测器信号的采集,系统更接近理想情况。
第二,如图1a所示,激光三角法中θ角的理论范围是
式中,Δx表示被测物面移动位移,Δy表示PSD上的光斑移动位移,l表示被测物面的初始光斑与透镜前表面的距离,l′表示探测器中心与透镜后表面的距离,θ表示物面上光斑移动的直线轨迹与反射光线的夹角,
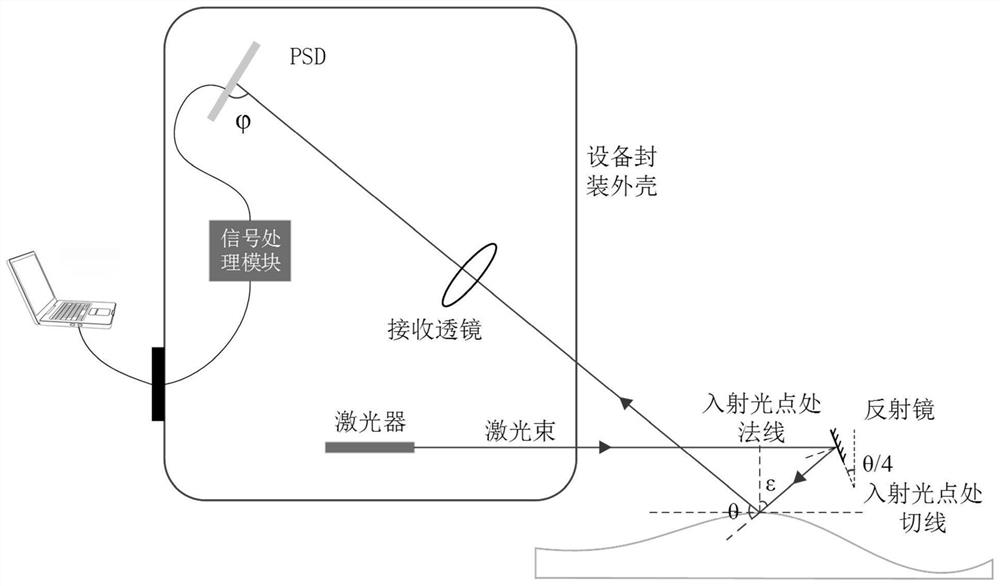
本发明技术方案如下:通过一块不垂直于入射激光的反射镜的反射作用,激光以入射角ε斜射到被测物面上,并发生漫反射(包含部分镜面反射),如图2所示。在入射激光关于物面入射点处法线的对称光线方向放置接收透镜,即该对称光线与接收透镜光轴重合,在接收透镜后放置PSD探测器及信号处理模块。
方案中,激光入射角ε与被测物面的形状和位置无关,只取决于反射镜相对入射激光的角度,而这一角度是根据被测物面粗糙度等属性来确定的,被测物体的材质决定了其对光的反射规律。以金属材质为例,当激光照射到金属材料的表面时,反射光通常以镜面反射为主,漫反射为辅,对不同加工情况下的金属表面,反射光的组成存在一定差异。因此,入射角ε的确定应在符合激光三角测量条件下,尽可能减少被测物面对光线的吸收。
对于接收透镜的放置,理论上应保证尽可能多的光线通过接收透镜,通常对于金属材质的被测物体,以镜面反射规律放置接收透镜即可,即反射角为ε。
根据本发明的原理,测量时只需将反射镜伸入到狭小测量空间中,但为保证反射光线能够被接收,设备伸入深度不应过大。
在固定好测量设备后,被测物面的移动必须沿入射光点处法线方向,否则将导致测量值与实际位移不符。
如图2所示,本发明为一种斜射式激光三角测量方法,能够在测量空间狭小的条件下,对机械结构的内尺寸进行测量。系统包括半导体激光器、激光反射镜、接收透镜模块、PSD探测器、信号处理模块和外部上位机。图3所示为测量设备的三维视图,其中图2为图3的俯视示意图。
所述半导体激光器应进行激光准直处理,进而确保到达反射镜时激光不发散且光斑足够小。
所述反光镜通过图3所示的两连杆结构与主设备固定,该方法避免了采用透明管状玻璃进行固定时对激光产生的反射和折射效应。由于ε的角度由被测物面粗糙度等属性决定,进而可以根据ε确定θ(被测物面入射光点处入射光与反射光间夹角)的大小,从而计算出反射镜与垂直方向的角度为θ/4。
所述接收透镜模块需结合初始测距、量程、PSD相对位置等传感器设计要求进行精密设计,对物体的反射光线起到汇聚作用,使得PSD接收到尽可能小的光斑。
所述PSD是型号为S4584-06的一维PSD传感器,光敏面尺寸为1mm*3.5mm,内部阻抗为140千欧,光谱响应范围为320nm至1100nm。PSD是一种基于P-N结的横向光电效应器件,如图3所示,在PSD电阻层的两端放置有一对电极,通过合理设置分流层并收集电流,可根据两电极电流信号的比例确定入射光的位置。理论上PSD光敏面电阻均匀,假设PSD中点为原点,两电极输出电流大小分别为I
式中:I
所述信号处理模块为A/D转换电路,输入电流模拟信号,输出端口为数字信号,并由主机上位机接收,经过计算后得到光斑相对位置信息。
使用本发明进行狭小空间尺寸测量的初始化流程如图4所示(测量工作面如图3)。其中,根据测量传感器的设计,初始测量高度(即激光器发射入射激光与被测物面的平行间距)为3mm,按照初始化流程进行操作后,当得到的位置信息为0时,则说明达到初始测量高度。当被测物面沿光斑处法线方向移动时,光斑位置发生变化,PSD上的光斑随之发生位移,通过进行设备的标定和算法设计,可由光斑位移距离计算出被测物体相对初始位置的位移。
所述传感器的标定方法如下:标定的目的是确定传感器所采集的位移数据与被测真实位移之间的变换关系,因此,需要在使用待标定传感器测量位移的同时,确定真实位移的大小。选用Renishaw公司的XL系列激光干涉仪,精度为0.1μm,用于测量被测物面的真实位移。
现以直射式激光三角位移传感器的标定为例介绍此标定方法。采用一种连续反向同步标定方案,如图5所示,测量镜组固定于被测物面一侧并放置在微位移台上,与参考镜组中的分光镜和干涉仪同处在一条直线上(参考镜组由分光镜和反光镜组成),除测量镜组外,其余设备位置固定。待标定传感器位于物面另一侧并固定在相应位置,激光器垂直入射到物面上。
激光器垂直于被测物面发射激光束,经被测物面反射,通过接收透镜被PSD接收,获得位移测量值;同时激光干涉仪发射的激光束,经过参考镜组,一部分经参考镜组的反射镜被反射,另一部分入射到测量镜组并被反射,两束反射光产生干涉形成干涉条纹,被激光干涉仪接收。
标定前按照传感器的初始化流程进行操作,并将干涉仪调零,使得当被测物面位于初始位置时,待标定传感器和干涉仪的输出都为0,实现标定系统的初始化。手动间隔调节微位移台,使光斑遍历光敏面各处,并分别记录PSD传感器和激光干涉仪在各间隔点的测量值X[n,1]和T[n,1],其中n为传感器采样点个数,构成原始数据集。采用曲线拟合的方法将X[n,1]和T[n,1]进行拟合,即可得到待标定传感器的测量数据与干涉仪真实数据之间的对应关系,设备标定完成。
设备仅需一次标定即可完成后续的所有测量任务,实际测量时,在传感器的量程范围内可直接获得被测物面相对初始位置的位移值。
本发明的新型激光三角测量方法的核心是反光镜的使用,通过反光镜改变激光光路,从而实现斜射式三角测量。优点是测量时仅需将反射镜伸入到狭小空间中,设备主体(激光发射和接收部分)是在测量空间以外的,在保证探测器接收到反射光线的条件下,可实现狭小空间微小尺寸的精密测量。
- 一种激光三角位移传感器及其测量方法
- 一种基于激光三角法位移传感器错位组合的孔径测量方法