一种智能康复机器人
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及手部康复装置技术领域,具体为一种智能康复机器人。
背景技术
手是充当人体感知周围环境的一个重要感觉器官,我国永久性功能障碍分级标准中,人的上肢功能占全身功能的60%,手指功能占上肢功能的90%,人类双手能作复杂而灵巧的捏、抓、夹、提等的动作,有极其精细的感觉,手的这些复杂功能与其解剖结构有密切关系,手部骨关节由腕骨、掌骨和指骨构成,指骨又由近端指骨、中指骨和远端指骨组成,拇指有两节指骨,其余指有三节指骨,腕骨、掌骨和近端指骨、中指骨和远端指骨之间又形成了腕掌关节(CM)、掌指关节(MCP)、近端指间关节(PIP)、远端指间关节(DIP)。
然而,我们在实际使用时发现,患者根据自身情况需在术后最佳时间进行手部康复训练,频率为每日2-3次,时长为每日半个小时左右,患者在使用现有的手部康复机器人进行康复训练时,大多直接将其穿戴在手部,虽然设计师在设计时已尽可能地使用质量较轻的材质,但是手部康复机器人的质量仍有400g左右,无疑对手部本就有不同程度损伤的患者造成了额外的训练负担,同时,现有的康复训练因其结构上的设计缺陷,仅能够进行手部的握紧和张开,不仅无法完成手部多种复杂功能的训练,而且使患者在训练时十分枯燥乏味,趣味性不足,不利于提高患者训练时的专注度,进而影响康复训练效果,为此,我们提出一种智能康复机器人。
发明内容
本发明的目的在于提供一种智能康复机器人,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种智能康复机器人,包括底座,所述底座上设置有多个滑动块,且多个所述滑动块在各手指握紧和张开方向内移位,所述底座一侧固定有主轴,以使得底座能够进行转动调节,实现不同康复训练项目的切换,所述底座顶部设置有康复训练机构,康复训练机构与滑动块配合使用,以实现手部不同功能的训练,达到不同训练效果,且底座一侧设置有转动部件,使得患者在进行康复训练时,避免了设备的穿戴,减轻了康复训练时的负担,通过康复训练机构,实现手部康复训练项目和不同类型游戏的结合,增加了患者在训练过程中的趣味性,极大地提高了训练效果,通过转动部件的配合,方便各个训练项目之间的转化调节,保证机器人正常使用。
优选的,所述康复训练机构包括安装在滑动块远离主轴一侧的卡柱,所述卡柱至少设置有两个,以实现不同结构的稳定卡接,进而方便各游戏之间的切换,所述底座上开设有多个定位孔,且多个所述定位孔内设置有手部张开游戏件,以进行弹球游戏,通过手指张开的动作,将球顶出,所述底座上开设有多个移位滑槽,多个所述滑动块分别滑动设置在相应的移位滑槽内,以使滑动块能够在各手指握紧和张开方向内移位,且底座顶部位于移位滑槽靠近主轴一端设置有支撑座,所述支撑座上设置有手部握紧游戏件,以进行联机游戏,通过握紧的力度不同,实现游戏内的飞行模块进入不同的高度,以避开障碍,多个所述滑动块顶部设置有拇指转动游戏件,以进行接球游戏,通过控制手指的横向转动,控制端部的球框进行接球。
优选的,所述支撑座的形状设置为L形,且所述底座靠近主轴一侧顶部设置有辅助撑板,配合支撑座使用,以使掌指关节能够放置在支撑座和辅助撑板上,减轻患者训练以外的负担。
优选的,所述手部张开游戏件包括设置在多个定位孔内的游戏箱一,且大拇指与其余四指的游戏箱一分离,多个所述滑动块上分别设置有顶杆,顶杆卡合在卡柱内,以方便不同游戏时的拆装,所述游戏箱一靠近顶杆一侧开设有多个圆槽,且内部设置有多个折板,以实现游戏箱内小球的复位。
优选的,所述手部握紧游戏件包括多个分别安装在支撑座靠近移位滑槽一侧的压力传感器,且压力传感器一侧固定有伸缩杆,且伸缩杆外侧套设有第一弹簧,所述第一弹簧端部设置有定位板,以方便手部握紧时带动滑动块挤压定位板,进而通过压力传感器进行信号传输,实现游戏内的飞行模块进入不同的高度,以避开障碍,多个所述滑动块上分别设置有弧形橡胶垫,弧形橡胶垫卡合在卡柱内,且弧形橡胶垫与顶杆不同时安装。
优选的,所述拇指转动游戏件包括多个分别插合在滑动块上的弧形滑轨,多个所述弧形滑轨的转动范围分别与各手指转动范围相匹配,所述弧形滑轨内均滑动设置有移位块,所述移位块靠近主轴一侧均设置有指套,以方便手指与移位块配合,在弧形滑轨内转动,且另一侧均设置有接球板,所述接球板端部设置有收纳袋,以方便将小球接住后进行暂存,所述底座上设置有安装在多个定位孔内的游戏箱二,且大拇指与其余四指的游戏箱二分离,多个所述滑动块两侧均开设有插槽,用于方便弧形滑轨的插合,且内部开设有与插槽箱连通的矩形槽,所述矩形槽内设置有限位件,以保证在移位块转动时滑动块无法移位。
优选的,所述限位件包括活动设置在矩形槽内部的升降板,且升降板底部设置有贯穿设置在滑动块内部的插合杆,所述插合杆上设置有固定板,且外侧套设有第二弹簧,且所述滑动块内开设有环槽,所述固定板和第二弹簧活动设置在环槽内,以驱使插合杆自动复位,所述底座上开设有多个定位槽,以保证在移位块转动时滑动块无法移位。
优选的,所述转动部件包括连接在主轴两端的安装板,所述底座和安装板之间设置有电动推杆,且电动推杆两端分别与底座和安装板转动连接。
与现有技术相比,本发明的有益效果是:
1、本发明使得患者在进行康复训练时,避免了设备的穿戴,减轻了康复训练时的负担,通过康复训练机构,实现手部康复训练项目和不同类型游戏的结合,增加了患者在训练过程中的趣味性,极大地提高了训练效果。
2、本发明使得通过转动部件与康复训练机构的配合,方便各个训练项目之间的转化调节,保证机器人正常使用。
附图说明
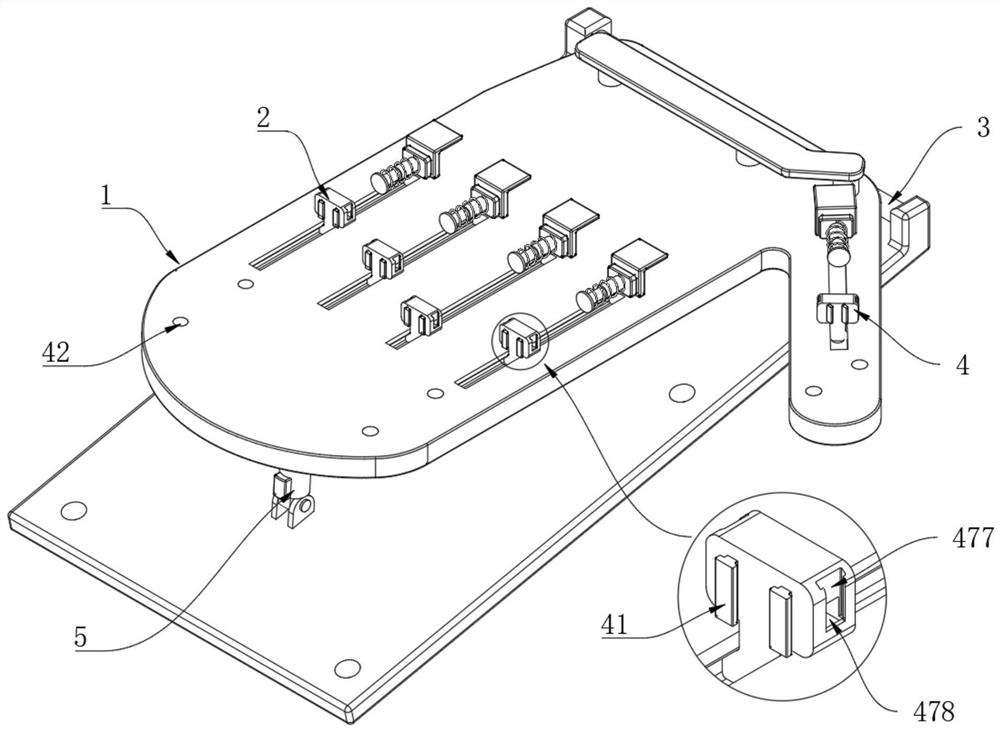
图1为本发明未组装结构示意图;
图2为本发明加装手部张开游戏件结构示意图;
图3为本发明加装手部握紧游戏件结构示意图;
图4为本发明加装拇指转动游戏件结构示意图;
图5为本发明滑动块局剖结构示意图;
图6为本发明图3另一方位结构示意图;
图7为本发明手部握紧游戏时联机游戏示意图。
图中:1-底座;2-滑动块;3-主轴;4-康复训练机构;41-卡柱;42-定位孔;43-手部张开游戏件;431-游戏箱一;432-顶杆;433-圆槽;434-折板;44-移位滑槽;45-支撑座;46-手部握紧游戏件;461-压力传感器;462-伸缩杆;463-第一弹簧;464-定位板;465-弧形橡胶垫;47-拇指转动游戏件;471-弧形滑轨;472-移位块;473-指套;474-接球板;475-收纳袋;476-游戏箱二;477-插槽;478-矩形槽;479-限位件;4791-升降板;4792-插合杆;4793-固定板;4794-第二弹簧;4795-环槽;4796-定位槽;48-辅助撑板;5-转动部件;51-安装板;52-电动推杆。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-7,本发明提供一种技术方案:一种智能康复机器人,包括底座1,所述底座1上设置有多个滑动块2,且多个所述滑动块2在各手指握紧和张开方向内移位,所述底座1一侧固定有主轴3,以使得底座1能够进行转动调节,实现不同康复训练项目的切换,
所述底座1顶部设置有康复训练机构4,康复训练机构4与滑动块2配合使用,以实现手部不同功能的训练,达到不同训练效果,且底座1一侧设置有转动部件5,能够与主轴3配合使用,实现底座1的转动调节,以方便患者在进行不同类别的游戏时,能够及时作出相应的调节,使得患者在进行康复训练时,避免了设备的穿戴,减轻了康复训练时的负担,通过康复训练机构4,实现手部康复训练项目和不同类型游戏的结合,增加了患者在训练过程中的趣味性,极大地提高了训练效果,通过转动部件5的配合,方便各个训练项目之间的转化调节,保证机器人正常使用。
所述康复训练机构4包括安装在滑动块2远离主轴3一侧的卡柱41,所述卡柱41至少设置有两个,以实现不同结构的稳定卡接,进而方便各游戏之间的切换,所述底座1上开设有多个定位孔42,且多个所述定位孔42内设置有手部张开游戏件43,以进行弹球游戏,通过手指张开的动作,将球顶出,所述底座1上开设有多个移位滑槽44,多个所述滑动块2分别滑动设置在相应的移位滑槽44内,以使滑动块2能够在各手指握紧和张开方向内移位,且底座1顶部位于移位滑槽44靠近主轴3一端设置有支撑座45,所述支撑座45上设置有手部握紧游戏件46,以进行联机游戏,通过握紧的力度不同,实现游戏内的飞行模块进入不同的高度,以避开障碍,多个所述滑动块2顶部设置有拇指转动游戏件47,以进行接球游戏,通过控制手指的横向转动,控制端部的球框进行接球,通过卡柱41可随意拆装顶杆432和弧形橡胶垫465,进而方便各游戏之间的切换。
所述支撑座45的形状设置为L形,且所述底座1靠近主轴3一侧顶部设置有辅助撑板48,配合支撑座45使用,以使掌指关节能够放置在支撑座45和辅助撑板48上,减轻患者训练以外的负担,在训练过程中,支撑座45和辅助撑板48相配合使用,以保证训练过程中的舒适性。
所述手部张开游戏件43包括设置在多个定位孔42内的游戏箱一431,且大拇指与其余四指的游戏箱一431分离,多个所述滑动块2上分别设置有顶杆432,顶杆432卡合在卡柱41内,以方便不同游戏时的拆装,所述游戏箱一431靠近顶杆432一侧开设有多个圆槽433,且内部设置有多个折板434,以实现游戏箱内小球的复位,在进行手部张开训练时,将游戏箱一431安装在底座1上的定位孔42内,且大拇指与其余四指不同,并在滑动块2上的卡柱41上卡接顶杆432,以方便从圆槽433内将游戏箱一431内的小球顶出,然后启动电动推杆52将底座1向上顶起至合适角度,以保证小球在弹出后,随游戏箱一431的倾斜和自身重力作用向下滚动,且在折板434的作用下,使其仍能够回到圆槽433内,游戏箱一431内小球数量优选为4个,但不局限,同时弹出的滑动块2也能够随游戏箱一431的倾斜和自身重力作用向下滑动复位,避免过度移位后,患者手指无法触及,在训练过程中,支撑座45和辅助撑板48相配合使用,以保证训练过程中的舒适性。
所述手部握紧游戏件46包括多个分别安装在支撑座45靠近移位滑槽44一侧的压力传感器461,且压力传感器461一侧固定有伸缩杆462,且伸缩杆462外侧套设有第一弹簧463,所述第一弹簧463端部设置有定位板464,以方便手部握紧时带动滑动块2挤压定位板464,进而通过压力传感器461进行信号传输,实现游戏内的飞行模块进入不同的高度,以避开障碍,多个所述滑动块2上分别设置有弧形橡胶垫465,弧形橡胶垫465卡合在卡柱41内,且弧形橡胶垫465与顶杆432不同时安装,在进行手部握紧训练时,需将顶杆432从卡柱41内拆卸下来,并将弧形橡胶垫465卡接在卡柱41内,以方便患者之间的向后移位,而游戏箱一431可从定位孔42中拆卸下来,也可以继续安装在定位孔42内,且底座1的角度可不做调整,然后外联游戏设备,通过手指握紧带动定位板464移位,并在移位过程中,使伸缩杆462缩短并压缩第一弹簧463,然后作用在压力传感器461上,并由其将信号传递给游戏设备,使游戏内的飞行模块进入不同的高度,以避开障碍,此游戏仅有优选方案,但不局限,在训练过程中,支撑座45和辅助撑板48相配合使用,以保证训练过程中的舒适性。
所述拇指转动游戏件47包括多个分别插合在滑动块2上的弧形滑轨471,多个所述弧形滑轨471的转动范围分别与各手指转动范围相匹配,所述弧形滑轨471内均滑动设置有移位块472,所述移位块472靠近主轴3一侧均设置有指套473,以方便手指与移位块472配合,在弧形滑轨471内转动,且另一侧均设置有接球板474,所述接球板474端部设置有收纳袋475,以方便将小球接住后进行暂存,所述底座1上设置有安装在多个定位孔42内的游戏箱二476,且大拇指与其余四指的游戏箱二476分离,多个所述滑动块2两侧均开设有插槽477,用于方便弧形滑轨471的插合,且内部开设有与插槽477箱连通的矩形槽478,所述矩形槽478内设置有限位件479,以保证在移位块472转动时滑动块2无法移位,在进行拇指转动游戏时,需将游戏箱一431从定位孔42上拆卸下来,并重新安装上游戏箱二476,且大拇指与其余四指不同,然后移动滑动块2至插合杆4792与底座1上的定位槽4796相对齐,再将弧形滑轨471插合在插槽477内,在插入过程中,弧形滑轨471两侧的突出部向下顶动升降板4791,并带动插合杆4792插入定位槽4796内,过程中,带动固定板4793在环槽4795内上下滑动,并压缩第二弹簧4794,其中,弧形滑轨471的突出部与两侧的插槽477存在过盈配合,且摩擦力和由弧形滑轨471、移位块472、指套473和接球板474等的重力的合力大于第二弹簧4794对插合杆4792向上的的弹簧弹力,使得训练过程中,不存在将弧形滑轨471顶起的可能性,然后,启动电动推杆52,将底座1放平,即可开始训练,训练时,由落球设备在接球板474端部的球门转动轨迹内释放小球,患者通过拇指的转动,带动接球板474转动,将小球接住,使其落入收纳袋475内,短暂存放,在训练过程中,支撑座45和辅助撑板48相配合使用,以保证训练过程中的舒适性。
所述限位件479包括活动设置在矩形槽478内部的升降板4791,且升降板4791底部设置有贯穿设置在滑动块2内部的插合杆4792,所述插合杆4792上设置有固定板4793,且外侧套设有第二弹簧4794,且所述滑动块2内开设有环槽4795,所述固定板4793和第二弹簧4794活动设置在环槽4795内,以驱使插合杆4792自动复位,所述底座1上开设有多个定位槽4796,以保证在移位块472转动时滑动块2无法移位,将弧形滑轨471插合在插槽477内,在插入过程中,弧形滑轨471两侧的突出部向下顶动升降板4791,并带动插合杆4792插入定位槽4796内,过程中,带动固定板4793在环槽4795内上下滑动,并压缩第二弹簧4794,其中,弧形滑轨471的突出部与两侧的插槽477存在过盈配合,且摩擦力和由弧形滑轨471、移位块472、指套473和接球板474等的重力的合力大于第二弹簧4794对插合杆4792向上的的弹簧弹力,使得训练过程中,不存在将弧形滑轨471顶起的可能性。
所述转动部件5包括连接在主轴3两端的安装板51,安装板51可通过螺栓或魔术贴等方式安装在病床一侧,方便患者康复训练,所述底座1和安装板51之间设置有电动推杆52,且电动推杆52两端分别与底座1和安装板51转动连接。
工作原理:
在使用时,医护人员可将安装板51安装在患者病床两侧,方便患者进行手部康复训练,且具体康复训练项目如下:
在进行手部张开训练时,将游戏箱一431安装在底座1上的定位孔42内,且大拇指与其余四指不同,并在滑动块2上的卡柱41上卡接顶杆432,以方便从圆槽433内将游戏箱一431内的小球顶出,然后启动电动推杆52将底座1向上顶起至合适角度,以保证小球在弹出后,随游戏箱一431的倾斜和自身重力作用向下滚动,且在折板434的作用下,使其仍能够回到圆槽433内,游戏箱一431内小球数量优选为4个,但不局限,同时弹出的滑动块2也能够随游戏箱一431的倾斜和自身重力作用向下滑动复位,避免过度移位后,患者手指无法触及,在训练过程中,支撑座45和辅助撑板48相配合使用,以保证训练过程中的舒适性;
在进行手部握紧训练时,需将顶杆432从卡柱41内拆卸下来,并将弧形橡胶垫465卡接在卡柱41内,以方便患者之间的向后移位,而游戏箱一431可从定位孔42中拆卸下来,也可以继续安装在定位孔42内,且底座1的角度可不做调整,然后外联游戏设备,通过手指握紧带动定位板464移位,并在移位过程中,使伸缩杆462缩短并压缩第一弹簧463,然后作用在压力传感器461上,并由其将信号传递给游戏设备,使游戏内的飞行模块进入不同的高度,以避开障碍,此游戏仅有优选方案,但不局限,在训练过程中,支撑座45和辅助撑板48相配合使用,以保证训练过程中的舒适性;
在进行拇指转动游戏时,需将游戏箱一431从定位孔42上拆卸下来,并重新安装上游戏箱二476,且大拇指与其余四指不同,然后移动滑动块2至插合杆4792与底座1上的定位槽4796相对齐,再将弧形滑轨471插合在插槽477内,在插入过程中,弧形滑轨471两侧的突出部向下顶动升降板4791,并带动插合杆4792插入定位槽4796内,过程中,带动固定板4793在环槽4795内上下滑动,并压缩第二弹簧4794,其中,弧形滑轨471的突出部与两侧的插槽477存在过盈配合,且摩擦力和由弧形滑轨471、移位块472、指套473和接球板474等的重力的合力大于第二弹簧4794对插合杆4792向上的的弹簧弹力,使得训练过程中,不存在将弧形滑轨471顶起的可能性,然后,启动电动推杆52,将底座1放平,即可开始训练,训练时,由落球设备在接球板474端部的球门转动轨迹内释放小球,患者通过拇指的转动,带动接球板474转动,将小球接住,使其落入收纳袋475内,短暂存放,在训练过程中,支撑座45和辅助撑板48相配合使用,以保证训练过程中的舒适性。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 基于人工智能和互联网技术的智能脑卒中语言康复机器人系统
- 一种智能康复机器人