一种采用控制轴平面位置解耦机构的多叶片摆线推进器
文献发布时间:2023-06-19 10:25:58
技术领域
本发明涉及推进器装置技术领域,具体为一种采用控制轴平面位置解耦机构的多叶片摆线推进器。
背景技术
具有海洋勘测、海底侦察、水下救捞以及近水面辅助作业的水下机器人已成为人们探索海洋和开发海洋的重要工具。为了适应不同的水下环境,水下机器人至少应具有悬停,前进,后退,上升,下潜和转弯的能力。目前,水下机器人广泛采用螺旋桨进行推进,而螺旋桨普遍存在推进效率较低,低速时的机动性能不足等问题。相对于螺旋桨,由于摆线推进器可以产生平面360°范围内方向任意可调的推进力,因而采用摆线推进器的水下机器人具备水下前进、侧向横移和原地转向等高机动性动作。
然而,目前摆线推进器内部结构有六连杆式、曲柄滑块式和舵机式几种,六连杆式需要确定每个连杆的长度,曲柄滑块式结构过于复杂,舵机式需要对每个叶片配置一个舵机控制摆动,并且这些方案只能近似描述摆线推进器的运动规律,一定程度影响推进器的推进性能。
因此,亟待设计一款结构简单,可准确描述运动规律的摆线推进器内部结构。
发明内容
本发明公开一种采用控制轴平面位置解耦机构的多叶片摆线推进器,可任意改变摆线推进器控制轴的位置,从而改变推力大小和方向,并能精确实现摆线推进器的运动机理。
本发明采用的技术方案如下:
一种采用控制轴平面位置解耦机构的多叶片摆线推进器,包括基座、齿轮组机构、直线驱动机构以及导杆滑块机构;所述基座的中心连接有主轴,所述基座下方设置至少三个叶片,所述至少三个叶片以所述主轴为中心对称布置;所述导杆滑块机构包括与所述至少三个叶片连接的导杆,每个导杆上套设有沿其滑动的滑块,各滑块沿高度方向依次铰接,各滑块重心的连线形成一相对于所述主轴偏心设置的控制轴;所述直线驱动机构具有固定端和活动端,固定端设有一绕所述主轴转动的铰点,活动端与所述导杆滑块结构中的滑块在所述控制轴位置处铰接,用于调节所述控制轴相对于所述主轴的偏心距;所述齿轮组机构与所述直线驱动机构连接,用于调节所述控制轴相对于所述主轴的周向位置,从而改变所述摆线推进器推力大小及方向。
每个叶片一体式连接有一穿设于所述基座的自转轴,叶片通过所述自转轴与所述导杆连接。
所述导杆垂直于与其相连的叶片的叶弦线方向。
所述直线驱动机构采用丝杠螺母机构。
所述丝杠螺母机构包括套筒,其一端与所述主轴铰接,所述套筒上设有驱动电机一,其输出轴与丝杆连接,所述丝杆上旋接有丝杆螺母,所述丝杆螺母与位于最底部的所述滑块铰接。
所述齿轮组机构至少包括相互啮合的一对主动齿轮和从动齿轮,所述主动齿轮的轮中心轴与驱动电机二的输出轴相连,驱动电机二固定在所述套筒上,所述从动齿轮套设在所述主轴上,并与所述基座固连。
所述齿轮组机构设置在所述直线驱动机构中套筒的下方。
每个滑块的顶部、底部分别设有用于与相邻滑块铰接的凸台、凹槽。
本发明的有益效果如下:
本发明可以任意改变摆线推进器的控制轴的位置,并能精确实现摆线推进器的运动机理。具体优点如下:
1、本发明利用导杆滑块机构完成控制点与叶片的连接,结构简单,能够精确实现叶片的摆线运动规律。
2、本发明通过齿轮组机构改变控制轴的周向位置,通过丝杠滑块螺母机构改变控制点轴的偏心距,这样能任意改变控制轴的空间位置,从而改变推力大小和方向。
3、本发明滑块之间铰接,以保证滑块之间仅能产生转动,滑块与导杆之间仅能产生滑动,这使所发明摆线推进器的叶片能够精确按照摆线运动规律运动。
4、本发明在空间和电机负载能力允许范围内,可随意调节叶片数量,可以根据实际水下环境选择最为合适的叶片数。
5、本发明仅通过三个电机可以控制基座绕主轴公转、改变偏心距、及改变控制轴周向位置,结构紧凑,易实现,且控制简便。
附图说明
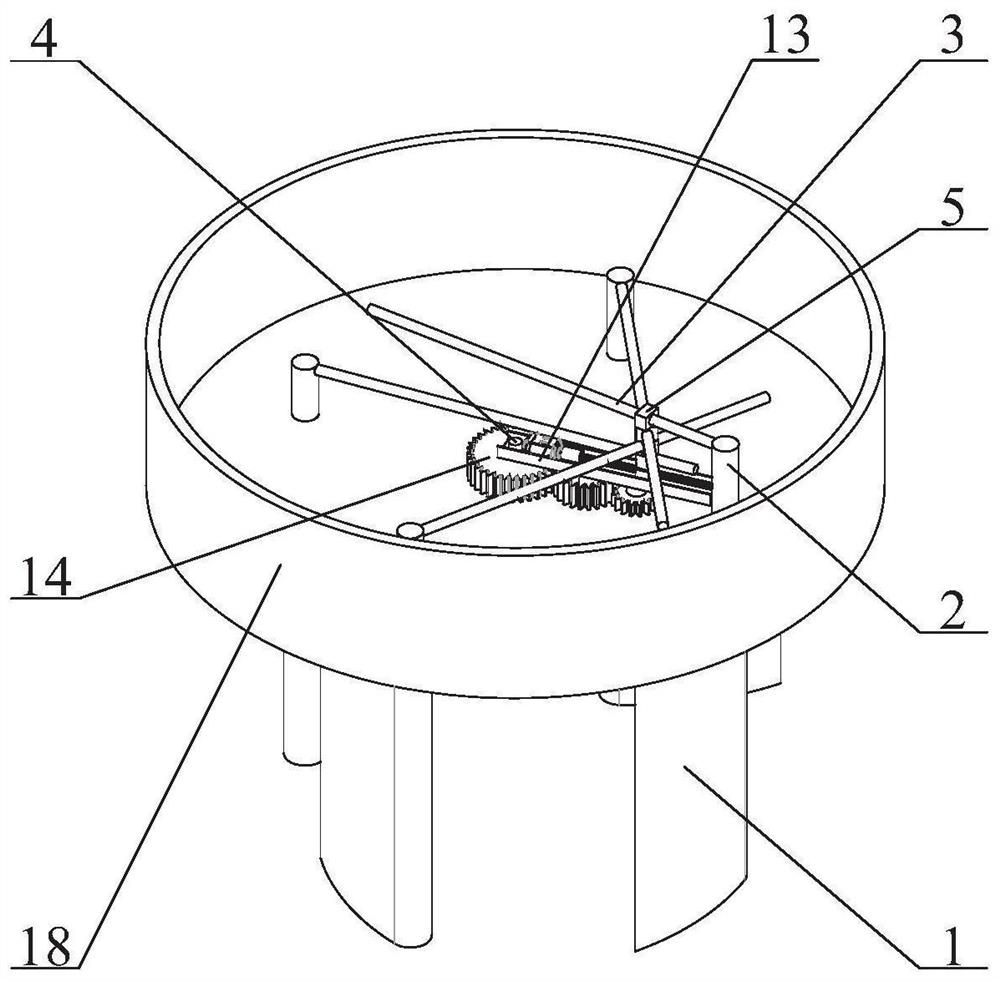
图1为本发明具有四叶片的摆线推进器的立体结构示意图。
图2为图1中导杆滑块机构的安装结构示意图。
图3为本发明叶片的结构示意图。
图4为本发明直线驱动机构的结构示意图。
图5为本发明齿轮组机构的结构示意图。
图6为本发明具有四叶片的摆线推进器运动时的受力图。
图7为本发明具有四叶片的摆线推进器的控制轴在初始位置,偏心率为0.4时的结构示意图。
图8为本发明具有四叶片的摆线推进器的控制轴绕主轴逆时针旋转90°,偏心率为0.5时的结构示意图。
图9为本发明具有四叶片的摆线推进器的控制轴绕主轴逆时针旋转180°,偏心率为0.6时的结构示意图。
图10为本发明具有四叶片的摆线推进器的控制轴绕主轴逆时针旋转270°,偏心率为0.7时的结构示意图。
图11为本发明采用控制轴平面位置解耦机构的三叶片摆线推进器的结构示意图。
图12为本发明采用控制轴平面位置解耦机构的五叶片摆线推进器的结构示意图。
图13为本发明采用控制轴平面位置解耦机构的六叶片摆线推进器的结构示意图。
图中:1、叶片;2、自转轴;3、导杆;4、主轴;5、滑块;9、丝杆螺母;10、驱动电机一;11、联轴器;12、丝杆;13、套筒;14、从动齿轮;15、驱动电机二;16、主动齿轮;17、传动齿轮;18、基座。
具体实施方式
以下结合附图说明本发明的具体实施方式。
如图1所示,本实施例的采用控制轴平面位置解耦机构的多叶片摆线推进器,包括基座18、齿轮组机构、直线驱动机构以及导杆滑块机构;
基座18的中心连接有主轴4,基座18下方设置至少三个叶片1,至少三个叶片1以主轴4为中心对称布置;
如图2和图3所示,导杆滑块机构包括与每个叶片1连接的导杆3,每个导杆3上套设有沿其滑动的滑块5,各滑块5沿高度方向依次铰接,各滑块5重心的连线形成一相对于主轴4偏心设置的控制轴;
如图1和图4所示,直线驱动机构的固定端设有一绕主轴4转动的铰点,直线驱动机构的活动端与所述导杆滑块结构中的滑块5在控制轴位置处铰接,用于调节控制轴相对于主轴4的偏心距;
齿轮组机构与直线驱动机构连接,用于调节控制轴相对于主轴4的周向位置,从而改变摆线推进器推力大小及方向。
如图2和图3所示,每个叶片1一体式连接有一穿设于基座18的自转轴2,叶片1通过自转轴2与导杆3连接。
如图1和图4所示,直线驱动机构采用丝杠螺母机构,包括套筒13,其一端与主轴4铰接,套筒13上设有驱动电机一10,其输出轴与丝杆12连接,其上旋接有丝杆螺母9,丝杆螺母9与位于最底部的滑块5铰接。
具体地,驱动电机10通过联轴器11与丝杆12连接。
在基座18静止或是转动的过程中,驱动电机一10可以随时启动,驱动丝杆螺母9做直线运动,从而改变各滑块5的位置,也就改变了控制轴的偏心距。
如图5所示,齿轮组机构至少包括相互啮合的一对主动齿轮16和从动齿轮14,主动齿轮16的轮中心轴与驱动电机二15的输出轴相连,驱动电机二15固定在所述套筒13上,从动齿轮14套设在主轴4上,并与基座18固连。
具体地,本实施例的采用控制轴平面位置解耦机构的多叶片摆线推进器,齿轮组机构设置在直线驱动机构中套筒13的下方。
齿轮组机构中齿轮还包括至少传动齿轮17,传动齿轮17与从动齿轮14、主动齿轮16啮合,驱动电机二15设置在套筒13下方。
在基座18静止或是转动的过程中,驱动电机二15可以随时启动,主动齿轮16转动,从而使得套筒13绕主轴4转动,进而改变丝杆螺母9和滑块5的位置,也就改变了控制轴的周向位置。
具体地,叶片1的自转轴2与基座18的结合部分经过密封处理。
具体地,如图1所示,以四个叶片的摆线推进器为例,偏心率,即丝杆螺母9的几何中心到基座18的中心位置的水平距离与叶片1的自转轴2的中心到基座18中心的水平距离之比可以为0-0.7,超过0.7时导杆3在摆动时会与自转轴2产生干涉。
本实施例的摆线推进器结构适用于不同叶片数量,叶片可以为3-6个,叶片数量不同,摆线推进器的最大偏心率不同。
当叶片有多个时,第一个滑块5铰接在丝杆螺母9上,后面的依次铰接在前一个上,因此导杆5之间具有一定高度差。每个滑块5顶部具有圆柱凸台,底部具有同规格的凹槽,使得下面滑块5的凸台能够嵌入上面滑块5的凹槽内,确保每个滑块5仅能围绕控制轴转动。
本实施例的多叶片摆线推进器,通过多个电机的驱动,可以实现摆线推进器在工作时叶片摆动产生推力,并可以随时改变偏心距以及控制轴的周向位置,从而改变推力的大小及方向。
导杆3从摆线推进器的叶片1的自转轴2上伸出,且始终与叶片1的叶弦线垂直,而每个与导杆3相配合的滑块5的几何中心均与控制轴在同一竖直方向,同时基座18固定在需要使用该装置的载体上,载体通过电机等驱动装置驱动基座18绕主轴4转动,带动叶片1的自转轴2围绕主轴4公转。驱动电机在带动基座18绕主轴4转动时,驱动电机二15同时驱动齿轮组机构转动,保证控制轴绝对位置保持不变,此时滑块5也静止不动,导杆3会与滑块5产生相对滑动,且导杆5始终交于控制轴,这使得叶片1的叶弦线方向始终与其自转轴2轴线到控制轴轴线的连线垂直,从而满足了摆线推进器的运动机理,产生推力。
如图6所示,摆线推进器在工作过程中,基座18围绕主轴的轴线0做圆周运动。由于叶片1的叶弦线方向始终与其自转轴2的轴线A到控制轴轴线R的连线垂直,因此叶片1会随其自转轴2摆动。叶片1与水流有一定的攻角β,进而水流会在叶片1上产生升力和阻力。
由于各叶片的摆动规律具有对称性,所以各叶片所受的阻力将相互抵消。叶片运动过程中,各个叶片上的升力矢量叠加最终构成摆线推进器的推力。
当基座18绕主轴4转动时,驱动电机二15控制齿轮组机构绕主轴转动的转速与基座18绕主轴4的转速反向同步,从而保证控制轴相对于主轴4的周向位置保持不变,以适用载体匀速直线的航行。
需要改变推力方向时,驱动电机二15在之前转速的基础上调节自身转速,推力方向改变后,再次回归之前的同步转速,维持载体的匀速直线航行。
改变控制轴的位置,可以改变叶片的摆动规律,进而改变摆线推进器产生的推力大小和方向。
具体地,可以任意改变控制轴的径向和周向位置,以四叶片的摆线推进器为例,如图7-图10所示,分别为控制轴相对于主轴4旋转0°、90°、180°和270°,且偏心率分别为0.4、0.5、0.6、0.7的状态。
图11-图13分别为三叶片、五叶片、六叶片摆线推进器的结构示意图。具体地,三叶片的导杆滑块式控制轴可调的摆线推进器结构,其最大偏心率为0.65。五叶片的导杆滑块式控制轴可调的摆线推进器结构,其最大偏心率为0.8。六叶片的导杆滑块式控制轴可调的摆线推进器结构,其最大偏心率为0.7。
- 一种采用控制轴平面位置解耦机构的多叶片摆线推进器
- 一种采用控制轴平面位置解耦机构的多叶片摆线推进器